1.本实用新型涉及刮泥机技术领域,尤其涉及一种桁车式刮泥机自动运行的控制回路。
背景技术:
2.桁车式刮泥机是指适用于给排水工程中平流式沉淀池的排水工程用具,应用于电厂、冶金、污水处理厂等各生产行业。桁车式刮泥机含有一台水平行走电机和垂直升降电机。刮泥机运行到沉淀池两端时,通过限位开关的反馈实现逻辑控制。电气控制回路中设计手动和自动两种控制模式,自动模式下,两台电机按照“上升
→
后退
→
下降
→
前进”的时序进行顺序控制。目前市面上针对桁车式刮泥机自动运行的控制回路一般采用plc实现自动控制。但plc系统成本相对较高,后期维护有一定的技术难度,同时可能还会存在于主监控的通讯问题。
技术实现要素:
3.为克服现有技术中存在的问题,本实用新型提供了一种桁车式刮泥机自动运行的控制回路,来实现桁车式刮泥机自动运行控制功能,设备方面仅仅使用到继电器、接触器、主令电气、热继电器、限位开关等常规的电器元器件,代替plc控制可以大大降低成本,提高维护效率。
4.本实用新型所解决的技术问题可以采用以下技术方案来实现:
5.一种桁车式刮泥机自动运行的控制回路,包括主回路和控制回路,所述主回路包括两个电机、微型断路器、接触器单元、热继电器与交流电源相串联,所述热继电器包括热继电器10fr和热继电器11fr,所述两个电机包括水平行走电机和垂直升降电机,所述水平行走电机和垂直升降电机并联连接,所述接触器单元由两个接触器错相并联组成,所述接触器单元与控制回路相连接,包括接触器ka1、接触器ka2、接触器ka3、接触器ka4、接触器ka6、接触器ka11、接触器ka12、接触器ka13、接触器ka14、接触器10km2、接触器10km1、接触器11km1、接触器11km2,对控制回路进行控制,所述控制回路包括手动运行回路、自动运行回路、前行控制回路,后退控制回路,上升控制回路,下降控制回路和信号指示回路。
6.进一步的,所述手动运行回路为切换开关sa手动位置常开节点与接触器ka1 线圈串联,接触器ka1常开节点与手动停止按钮ss1常闭节点串联后与水平行走电机的控制回路串联,所述接触器ka1与手动停止按钮ss2常闭节点串联后与垂直升降电机的控制回路串联。
7.进一步的,所述自动运行回路为切换开关sa自动位置常开节点与接触器ka2 线圈串联,接触器ka2常开节点与水平行走电机和垂直升降电机的控制回路串联。
8.进一步的,所述前行控制回路为手动前进按钮sf1和接触器ka2常闭节点串联后作为手动控制部分,接触器ka13常开节点和接触器ka4常闭节点以及接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器10km1常开节点并联后,与接
触器ka11常闭节点、接触器10km2常闭节点和接触器10km1线圈串联。
9.进一步的,所述后退控制回路为手动前进按钮sf2和接触器ka2常闭节点串联后作为手动控制部分,接触器ka14常开节点和接触器ka4常闭节点以及接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器10km2常开节点并联后,与接触器ka12常闭节点、接触器10km1常闭节点和接触器10km2线圈串联。
10.进一步的,所述前行控制回路和后退控制回路并联后与热继电器10fr常闭节点串联。
11.进一步的,所述上升控制回路为手动前进按钮sf4和接触器ka2常闭节点串联后作为手动控制部分,接触器ka11常开节点和接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器11km2常开节点并联后,与接触器ka14常闭节点、接触器11km1常闭节点和接触器11km2线圈串联。
12.进一步的,所述下降控制回路为手动前进按钮sf3和接触器ka2常闭节点串联后作为手动控制部分,接触器ka12的常开节点和接触器ka4常闭节点以及接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器11km1常开节点并联后,与接触器ka13常闭节点、接触器11km2常闭节点和接触器11km1线圈串联。
13.进一步的,所述上升控制回路和下降控制回路并联后与热继电器11fr常闭节点串联。
14.进一步的,所述信号指示回路为指示灯hr1与接触器10km1线圈并联,指示灯hr2与接触器10km2线圈并联,指示灯hr3与接触器11km1线圈并联,指示灯hr4与接触器11km2线圈以及接触器ka4线圈并联,热继电器10fr常开节点和热继电器11fr常开节点并联后与接触器ka6线圈串联,指示灯hy与接触器ka6线圈并联,指示灯hg11与接触器ka11线圈并联后与前进限位开关sq1 常开节点串联,指示灯hg12与接触器ka12线圈并联后与后退限位开关sq2常开节点串联,指示灯hg13与接触器ka13线圈并联后与下降限位开关sq3常开节点串联,指示灯hg14与接触器ka14线圈并联后与上升限位开关sq4常开节点串联。
15.与现有技术相比,本实用新型的有益效果是:本实用新型通过电器元器件组成的控制回路能够很好的实现桁车式刮泥机的自动控制功能,相比plc控制来说更为简单,成本更低,且因为继电器、接触器等电器元器件广泛使用在生产现场各种控制回路,产品成熟度高,更易于现场人员的维护。
附图说明
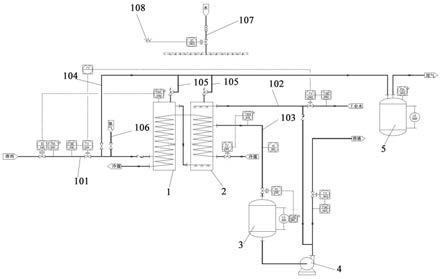
16.图1是本实用新型桁车式刮泥机的电气主回路;
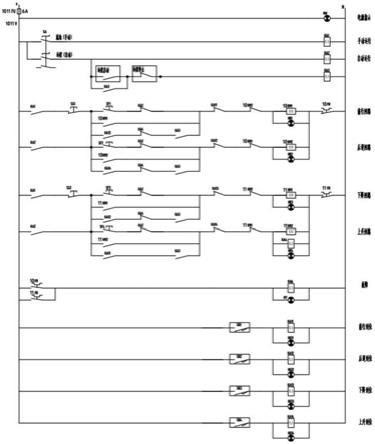
17.图2是本实用新型桁车式刮泥机的电气控制回路。
具体实施方式
18.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
19.实施例1:
20.一种桁车式刮泥机自动运行的控制回路,包括主回路和控制回路,所述主回路包括两个电机、微型断路器、接触器单元、热继电器与交流电源相串联,所述热继电器包括热继电器10fr和热继电器11fr,所述两个电机包括水平行走电机和垂直升降电机,所述水平行走电机和垂直升降电机并联连接,所述接触器单元由两个接触器错相并联组成,所述接触器单元与控制回路相连接,包括接触器ka1、接触器ka2、接触器ka3、接触器ka4、接触器ka6、接触器ka11、接触器ka12、接触器ka13、接触器ka14、接触器10km2、接触器10km1、接触器11km1、接触器11km2,对控制回路进行控制,所述控制回路包括手动运行回路、自动运行回路、前行控制回路,后退控制回路,上升控制回路,下降控制回路和信号指示回路。
21.进一步的,所述手动运行回路为切换开关sa手动位置常开节点与接触器ka1 线圈串联,接触器ka1常开节点与手动停止按钮ss1常闭节点串联后与水平行走电机的控制回路串联,所述接触器ka1与手动停止按钮ss2常闭节点串联后与垂直升降电机的控制回路串联。
22.进一步的,所述自动运行回路为切换开关sa自动位置常开节点与接触器ka2 线圈串联,接触器ka2常开节点与水平行走电机和垂直升降电机的控制回路串联。
23.进一步的,所述前行控制回路为手动前进按钮sf1和接触器ka2常闭节点串联后作为手动控制部分,接触器ka13常开节点和接触器ka4常闭节点以及接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器10km1常开节点并联后,与接触器ka11常闭节点、接触器10km2常闭节点和接触器10km1线圈串联。
24.进一步的,所述后退控制回路为手动前进按钮sf2和接触器ka2常闭节点串联后作为手动控制部分,接触器ka14常开节点和接触器ka4常闭节点以及接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器10km2常开节点并联后,与接触器ka12常闭节点、接触器10km1常闭节点和接触器10km2线圈串联。
25.进一步的,所述前行控制回路和后退控制回路并联后与热继电器10fr常闭节点串联。
26.进一步的,所述上升控制回路为手动前进按钮sf4和接触器ka2常闭节点串联后作为手动控制部分,接触器ka11常开节点和接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器11km2常开节点并联后,与接触器ka14常闭节点、接触器11km1常闭节点和接触器11km2线圈串联。
27.进一步的,所述下降控制回路为手动前进按钮sf3和接触器ka2常闭节点串联后作为手动控制部分,接触器ka12的常开节点和接触器ka4常闭节点以及接触器ka3常开节点串联作为自动控制部分,手动控制部分和自动控制部分以及接触器11km1常开节点并联后,与接触器ka13常闭节点、接触器11km2常闭节点和接触器11km1线圈串联。
28.进一步的,所述上升控制回路和下降控制回路并联后与热继电器11fr常闭节点串联。
29.进一步的,所述信号指示回路为指示灯hr1与接触器10km1线圈并联,指示灯hr2与接触器10km2线圈并联,指示灯hr3与接触器11km1线圈并联,指示灯hr4与接触器11km2线圈以及接触器ka4线圈并联,热继电器10fr常开节点和热继电器11fr常开节点并联后与接触器ka6线圈串联,指示灯hy与接触器ka6线圈并联,指示灯hg11与接触器ka11线圈并联后与前进限位开关sq1 常开节点串联,指示灯hg12与接触器ka12线圈并联后与后退限位开关
sq2常开节点串联,指示灯hg13与接触器ka13线圈并联后与下降限位开关sq3常开节点串联,指示灯hg14与接触器ka14线圈并联后与上升限位开关sq4常开节点串联。
30.如图1所示,在主回路中,接触器10km1和接触器10km2控制水平行走电机的正反转,对应的工作状态是前行和后退,接触器10km1对应的工作状态是前行,接触器10km2对应的工作状态是后退;接触器11km1和接触器11km2控制垂直升降电机的正反转,对应的工作状态是上升和下降,所述接触器11km1 对应的工作状态是上升,接触器11km2对应的工作状态是下降。
31.如图2所示,在控制回路中,手动状态下,接触器ka1线圈得电,接触器 ka1的常开节点闭合,可通过停止按钮ss1和ss2实现手动停止的功能。手动合上前行按钮sf1,接触10km1的线圈得电,水平行走电机正转工作,刮泥机前行;同理,可实现刮泥机后退、上升、下降的功能。自动状态下,接触器ka2线圈得电,接触器ka2常开节点闭合,控制回路进入自动模式。当接受到远程启动命令后,接触器ka3线圈得电,刮泥机初始位置为前行到位处,限位开关sq1 的常开节点动作闭合,接触器ka11线圈和指示灯hg11得电,接触器11km2线圈、接触器ka4线圈和指示灯hr4得电,刮泥机上升;上升到位后,限位开关 sq4常开节点闭合,接触器ka14线圈和指示灯hg14得电,接触器10km2线圈和指示灯hr2得电,刮泥机后退;后退到位后,限位开关sq2常开节点闭合,接触器ka12线圈和指示灯hg12得电,接触器11km1线圈和指示灯hr3得电,刮泥机下降;下降到位后,限位开关sq3常开节点闭合,接触器ka13线圈和指示灯hg13得电,接触器10km1线圈和指示灯hr1得电,刮泥机前行,进行刮泥工作;如此循环,完成“上升
→
后退
→
下降
→
前进”的顺控工作。当接收到远程停止命令后,接触器ka3线圈失电,主回路接触器有保持信号的存在,会继续运行,直到达到限位位置后失电。
32.上述说明示出并描述了本实用新型的优选实施例,如前所述,应当理解本实用新型并非局限于本文所披露的形式,不应看作是对其他实施例的排除,而可用于各种其他组合、修改和环境,并能够在本文所述实用新型构想范围内,通过上述教导或相关领域的技术或知识进行改动。而本领域人员所进行的改动和变化不脱离本实用新型的精神和范围,则都应在本实用新型所附权利要求的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。