1.本发明属于软体机器人领域,更具体地,涉及一种柔性线性驱动系统。
背景技术:
2.在康复穿戴设备及手术机器人领域需要和人进行交互,涉及到多自由度驱动问题,传统的刚性结构在实现多自由度驱动时结构较为复杂,且难以实现微型化,在交互过程中易对人体造成损伤,而柔性驱动由于其材料本身特有的多自由度属性使其具有更高的仿生性能,对非结构化环境具有更高的适应能力。
3.现有的磁软体驱动由于磁场精准易控的特性现被广泛应用于各种新型驱动器的设计中,但现有磁软体驱动器多外加磁场控制,运动范围有限,且控制方式单一,难以实现较大的线性位移,在人工肌肉等新型研究领域应用有限,对于可一体化驱动的新型柔性磁驱提出了挑战。
技术实现要素:
4.针对现有技术的缺陷,本发明的目的在于提供一种柔性线性驱动系统,旨在解决现有的磁软件驱动器多外加磁场控制,运动范围有限,且控制方式单一,难以实现较大的线性位移的问题。
5.为实现上述目的,本发明提供了一种柔性线性驱动系统,包括柔性磁芯和柔性套筒;
6.柔性磁芯位于柔性套筒内;
7.柔性磁芯为基于硬磁软材料的阵列充磁磁芯,用于在通电的电磁线圈作用下,在柔性套筒中做线性往复运动;
8.柔性套筒为在柔性基底中放置独立电磁线圈后凝固成型形成,用于通过对电磁线圈中电流大小和时序的控制,驱动柔性磁芯运动;且用于在受到外力作用时,产生适应性变形。
9.优选地,柔性磁芯的制备过程为:
10.在柔性材料中混合硬磁颗粒均匀搅拌后在第一模具中凝固成型,脱模后制成磁芯柸料;
11.对磁芯柸料进行阵列充磁制成柔性磁芯。
12.优选地,柔性材料为pdms或ecoflex;
13.优选地,柔性磁芯为通过充磁形成的磁化方向交替改变的柔性磁阵列;
14.优选地,电磁线圈在柔性基底中均匀分布。
15.优选地,所述柔性套筒的制备过程为:
16.采用第二模具固定单层柔性内筒的形貌,经过凝固成型后形成单层柔性内筒;
17.在单层柔性内筒外固定电磁线圈的位置后,在第二模具内加入柔性基底,在柔性基底凝固成型之后脱模取出,完成柔性套筒的制备。
18.优选地,柔性磁芯为根据需求设置的任意长度。
19.总体而言,通过本发明所构思的以上技术方案与现有技术相比,具有以下有益效果:
20.本发明中柔性磁芯是基于硬磁软材料的阵列充磁磁芯,柔性套筒为柔性基底中放置独立电磁线圈,工作时,通过对电磁线圈中电流大小和时序控制,驱动柔性磁芯做线性往复运动。由于柔性材料本身具有可变形优势,使驱动系统可适应末端复杂不规则的运动。本发明由于采用了相对运动的方式提供运动行程,相比传统的磁控软体机器人,运动范围不受材料本身的变形能力的限制,同时不需要外部磁场控制,实现一体化驱动。
21.本发明中柔性材料以pdms或ecoflex为基底,由于柔性基底的拉伸和弯曲变形,可以使得柔性线性驱动系统适应外力产生变形。
22.本发明中柔性磁芯为通过充磁形成的磁化方向交替改变的柔性磁阵列,由于磁化方向交替改变,可以通过对阵列充磁方式的设计,增大柔性磁芯产生的磁场,同时使得其在均匀分布的线圈作用下产生线性位移。
23.本发明中电磁线圈在柔性基底中均匀分布,可以对每个线圈中的电流序列进行交替控制,实现柔性磁芯在柔性套筒内的线性往复运动。
附图说明
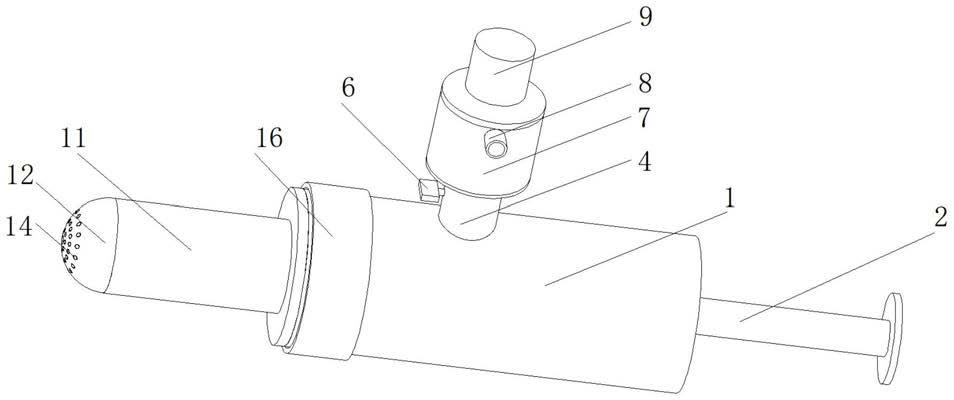
24.图1是本发明实施例提供的柔性线性驱动系统示意图;
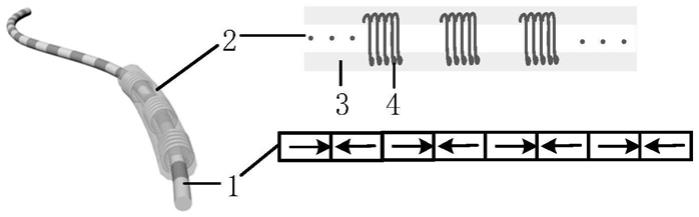
25.图2是本发明实施例提供的线性驱动自适应示意图;
26.标记说明:
27.1-柔性磁芯;2-柔性套筒;3-柔性基底;4-电磁线圈。
具体实施方式
28.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。
29.本发明提供的柔性线性驱动系统,是硬磁软材料的柔性磁芯1和电磁线圈4一体化的可变形线性驱动系统,在非结构化环境中实现较大行程的线性往复运动。通过柔性材料本身可变形优势,使驱动结构本身可适应末端复杂不规则的运动。本发明由于采用了相对运动的方式提供运动行程,相比传统的磁控软件机器人,运动范围不受材料本身的变形能力的限制,同时不需要外部磁场控制,实现一体化驱动。
30.实施例
31.如图1所示,本发明实施例提供了一种柔性线性驱动系统,包括柔性磁芯和柔性套筒;
32.柔性磁芯是基于硬磁软材料的阵列充磁磁芯;阵列为通过充磁形成的磁化方向交替改变的柔性磁阵列;硬磁材料是在如pdms,ecoflex等柔性基底中混合矫顽力大的硬磁颗粒,在模具中凝固成型,脱模后制成磁芯柸料,再对其进行阵列充磁制成柔性磁芯;
33.柔性套筒是在柔性基底中均匀放置独立电磁线圈后凝固成型形成,用于通过对电磁线圈中电流大小和时序的控制,实现柔性磁芯在柔性套筒内的线性往复运动;更为具体
地,柔性套筒包括柔性基底和电磁线圈,柔性基底包裹着电磁线圈;电磁线圈在柔性基底中均匀分布;且电磁线圈为螺线管状线圈,本身具体弹性,因此可以随柔性基底一起变形;
34.柔性磁芯中的硬磁软材料采用阵列充磁的方式,通过调整柔性套筒中不同电磁线圈通电顺序实现在电磁力作用下的线性位移;在非结构化环境中,当末端因为外力作用发生偏移,柔性线性驱动系统由于本身的柔性可以自适应末端运动方向,且可以通过对电磁线圈中通电电流的大小和时序的设计,实现磁芯在柔性套筒内的线性往复运动,如图2所示。
35.本发明与现有技术相比,存在以下优势:
36.本发明中柔性磁芯是基于硬磁软材料的阵列充磁磁芯,柔性套筒为柔性基底中放置独立电磁线圈,工作时,通过对电磁线圈中电流大小和时序控制,驱动柔性磁芯做线性往复运动。由于柔性材料本身具有可变形优势,使驱动系统可适应末端复杂不规则的运动。本发明由于采用了相对运动的方式提供运动行程,相比传统的磁控软体机器人,运动范围不受材料本身的变形能力的限制,同时不需要外部磁场控制,实现一体化驱动。
37.本发明中柔性材料以pdms或ecoflex为基底,由于柔性基底的拉伸和弯曲变形,可以使得柔性线性驱动系统适应外力产生变形。
38.本发明中柔性磁芯为通过充磁形成的磁化方向交替改变的柔性磁阵列,由于磁化方向交替改变,可以通过对阵列充磁方式的设计,增大柔性磁芯产生的磁场,同时使得其在均匀分布的线圈作用下产生线性位移;
39.本发明中电磁线圈在柔性基底中均匀分布,可以对每个线圈中的电流序列进行交替控制,实现柔性磁芯在柔性套筒内的线性往复运动。
40.本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
技术特征:
1.一种柔性线性驱动系统,其特征在于,包括:柔性磁芯和柔性套筒;所述柔性磁芯位于柔性套筒内;所述柔性磁芯为基于硬磁软材料的阵列充磁磁芯,用于在通电的电磁线圈作用下,在柔性套筒中做线性往复运动;所述柔性套筒为在柔性基底中放置独立电磁线圈后凝固成型形成,用于通过对电磁线圈中电流大小和时序的控制,驱动柔性磁芯做线性往复运动;且用于在受到外力作用时,产生适应性变形。2.根据权利要求1所述的柔性线性驱动系统,其特征在于,所述柔性磁芯的制备过程为:在柔性材料中混合硬磁颗粒均匀搅拌后在第一模具中凝固成型,脱模后制成磁芯柸料;对磁芯柸料进行阵列充磁制成柔性磁芯。3.根据权利要求2所述的柔性线性驱动系统,其特征在于,所述柔性材料基底为pdms或ecoflex。4.根据权利要求1至3任一所述的柔性线性驱动系统,其特征在于,所述柔性套筒的制备过程为:采用第二模具固定单层柔性内筒的形貌,经过凝固成型后形成单层柔性内筒;在单层柔性内筒外固定电磁线圈的位置后,在第二模具内加入柔性基底,在柔性基底凝固成型之后脱模取出,完成柔性套筒的制备。5.根据权利要求1至3任一所述的柔性线性驱动系统,其特征在于,所述柔性磁芯为通过充磁形成的磁化方向交替改变的柔性磁阵列。6.根据权利要求5所述的柔性线性驱动系统,其特征在于,所述电磁线圈在所述柔性基底中均匀分布。7.根据权利要求6所述的柔性线性驱动系统,其特征在于,所述柔性磁芯为根据需求设置的任意长度。
技术总结
本发明提供了一种柔性线性驱动系统,属于软体机器人领域,包括柔性磁芯和柔性套筒;柔性磁芯位于柔性套筒内;柔性磁芯为基于硬磁软材料的阵列充磁磁芯,用于在通电的电磁线圈作用下,在柔性套筒中做线性往复运动;柔性套筒为在柔性基底中放置独立电磁线圈后凝固成型形成,用于通过对电磁线圈中电流大小和时序的控制,驱动柔性磁芯运动;且用于在受到外力作用时,产生适应性变形。本发明相比传统的磁控软体机器人,运动范围不受材料本身的变形能力的限制,同时不需要外部磁场控制,实现一体化驱动。驱动。驱动。
技术研发人员:白坤 黄榕 曾勇
受保护的技术使用者:华中科技大学
技术研发日:2021.11.26
技术公布日:2022/2/18
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。