一种基于全聚焦的lamb波相位成像方法
技术领域
1.本公开属于超声导波损伤定位技术领域,具体涉及一种基于全聚焦的lamb波相位成像 方法。
背景技术:
2.结构健康监测在确保重大装备的服役安全并尽早发现其中隐藏的损伤或缺陷方面具有重 要的科学意义与迫切的工程需求。与被动式结构健康监测技术通过分析运行参数获得结构健 康状况相比,主动式结构健康监测技术则是通过向被测结构发射激励信号和处理响应信号, 来实现结构健康状态信息的在线获取和结构损伤的直接发现。在各类激励信号中,超声导波 具有传播距离较远,能量衰减小、损伤敏感度高等特点,因此广泛应用于主动式结构健康监 测。当超声导波在板类结构中传播时,超声导波在板的上下表面来回反射、折射,发生波形 转换、耦合叠加形成板波,即lamb波。然而,lamb波的频散特性使得其波包能量弥散、多 模态特性使得各模态的波包发生混叠。近年来,多种频散补偿技术和多种模态分离技术相继 提出。
3.在板类结构的损伤定位中,压电片传感器以阵列的方式布置在被测结构表面。通常采用 全矩阵捕获的方式获得响应信号,即传感器阵列中的每个传感器轮流产生激励信号,而其余 传感器接收响应信号。为放大损伤散射信号,叠加各响应信号获得聚焦于某一像素点的响应 信号总和,根据响应某点的幅值可确定某一像素点的像素值,因此称该成像方式为幅值成像。 然而由于直达波和边界反射波的能量远大于损伤散射波,阵列及边界周围点的像素值较高, 导致损伤点被淹没,通过限制成像区域可消除这一影响,但使得被测结构存在一定的成像盲 区;其次,幅值成像所获得的损伤图像中存在旁瓣、栅瓣等干扰因素,导致难以确定真实的 损伤数目及其位置,即成像质量低。
4.目前,超声成像领域现有基于相位相干因子和符号相干因子的相位成像技术。与幅值成 像不同,该技术利用相位信息确定成像指标。但是该技术未考虑lamb波的频散特性,并且 其瞬时相位提取方法也不适用于lamb波。在雷达领域,多重信号分类算法可对来波方向进 行估计。其改进算法可应用于结构健康监测,实现对损伤方向和距离的定位,但该算法依赖 于窄带信号提取技术以获得非频散信号,并需事先估计损伤数目。以上两点限制了该算法在 损伤监测中的进一步应用。此外,由于信号能量无法聚焦于损伤点,上述技术均难以监测微 小损伤。因此,发明一种适用于lamb波的聚焦相位成像技术尤为重要。
5.在背景技术部分中公开的上述信息仅仅用于增强对本发明背景的理解,因此可能包含不 构成在本国中本领域普通技术人员公知的现有技术的信息。
技术实现要素:
6.针对现有技术中的不足,本公开的目的在于提供一种基于全聚焦的lamb波相位成像方 法。该方法通过衡量不同组求和信号的瞬时相位与零相位的对齐情况,可构建损伤成像指标, 实现聚焦相位成像。该算法在抑制光栅旁瓣、能量聚焦、消除成像盲区等方面均优
于幅值成 像和其他相位成像。
7.为实现上述目的,本公开提供以下技术方案:
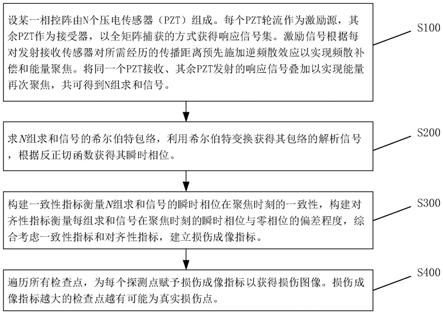
8.一种基于全聚焦的lamb波相位成像方法,包括如下步骤:
9.s100:设某一相控阵由n个压电传感器(piezoelectric transducer,pzt)组成。每个pzt 轮流作为激励源,其余pzt作为接受器,以全矩阵捕获的方式获得响应信号集。激励信号根 据每对发射-接收传感器对所需经历的传播距离预先施加逆频散效应以实现频散补偿和能量 聚焦。将同一个pzt接收、其余pzt发射的响应信号叠加以实现能量再次聚焦,共可得到n 组求和信号。
10.s200:求n组求和信号的希尔伯特包络,再利用希尔伯特变换获得其包络的解析信号, 根据反正切函数获得其瞬时相位。
11.s300:构建一致性指标衡量n组求和信号的瞬时相位在聚焦时刻的一致性,构建对齐性指 标衡量每组求和信号在聚焦时刻的瞬时相位与零相位的对齐程度,综合考虑一致性指标和对 齐性指标,建立损伤成像指标。
12.s400:遍历所有检查点,为每个检查点赋予损伤成像指标以获得损伤图像。损伤成像指 标越大的检查点越有可能为真实损伤点。
13.优选的,步骤s100中预先设计的频域激励信号可表示如下:
[0014][0015]
其中,f(ω)是原始激励信号f(t)的傅里叶变换;k(ω)是波数,与角频率ω相关;li是激 励pzt到某一检查点的传播距离;lj是某一检查点到接收pzt的传播距离。
[0016]
对s(ω)进行傅里叶变换,得到激励信号的时域表示如下:
[0017][0018]
优选的,步骤s200中,针对第m个检查点,第j组求和信号的希尔伯特包络定义为:
[0019][0020]
其中,i表示激励pzt的序号,j表示接收pzt的序号,共有n个pzt轮流激励接收; m表示检查点序号,共有m个检查点;r
ij
(t)表示第i个pzt激励,第j个pzt接收的响应信 号;r
jm
(t)表示第j组求和信号,即第j个传感器接收的所有响应信号的求和信号;hilbert(
·
) 表示希尔伯特变换。
[0021]
优选的,步骤s200中包络的解析信号可表示为:
[0022][0023]
优选的,步骤s200中聚焦时刻的瞬时相位可通过下式计算:
[0024][0025]
优选的,步骤s200中,针对第m个检查点,n组求和信号在聚焦时刻的瞬时相位向量 可定义为:
[0026][0027]
优选的,步骤s300包括以下步骤
[0028]
s301:针对第m个检查点,建立一致性指标,用于衡量n组求和信号在聚焦时刻瞬时相 位的一致性,具体定义为;
[0029][0030]
其中,是瞬时相位向量的方差。瞬时相位向量的一致性越高,一致 性指标越大。
[0031]
s302:建立对齐性指标,衡量每组求和信号在聚焦时刻的瞬时相位与零相位的对齐程度, 具体定义为:
[0032][0033]
其中,是第m个检查点的瞬时相位向量绝对值的均值。对瞬时相 位取均值以避免正负相位相互抵消。瞬时相位向量与零相位的对齐程度越高,对齐性指标越 大。
[0034]
s303:融合一致性指标cim和对齐性指标aim,建立针对第m个检查点的损伤成像指 标,具体可表示为:
[0035][0036]
与现有技术相比,本公开带来的有益效果为:充分考虑了lamb波的频散特性,信号能 量通过频散补偿和信号叠加聚焦于损伤点,有利于检测微弱损伤;损伤图像不存在光栅、旁 瓣等无关干扰,也不存在成像盲区,因此本技术的损伤检测范围可扩展至阵列及边界周围。
附图说明
[0037]
图1是本公开一个实施例提供的一种基于全聚焦的lamb波相位成像方法流程图;
[0038]
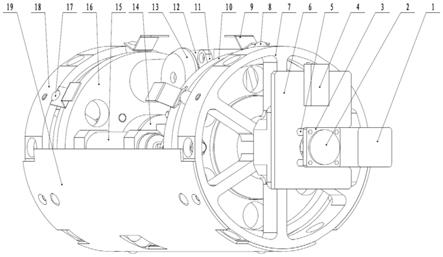
图2是本公开一个实施例提供的环形pzt相控阵列布局及损伤位置的示意图;
[0039]
图3是本公开一个实施例提供的响应信号采集方式的示意图;
[0040]
图4是本公开一个实施例提供的针对传播距离为600mm、聚焦时刻为0.85ms时设计的 激励信号在不同传播距离下响应信号的示意图;
[0041]
图5是本公开一个实施例提供的针对传播距离为600mm、聚焦时刻为0.25ms时设计的 激励信号在不同传播距离下响应信号的示意图;
[0042]
图6a至6c是本公开一个实施例提供的一个单周期正弦信号、对应的希尔伯特变换及其 瞬时相位的示意图;
[0043]
图7a至7d是本公开一个实施例提供的9组求和响应信号(减去健康基线信号)的希尔 伯特包络示意图,其中(7a,7b)为针对检查点f1(600,800)、f2(300,800)采用a0模式信号的希尔 伯特包络,(7c,7d)为采用s0模式的希尔伯特包络;
[0044]
图8a至8d是本公开一个实施例提供的9组求和响应信号(减去健康基线信号)的瞬时 相位示意图,其中(8a,8b)为针对检查点f1(600,800)、f2(300,800)采用a0模式信号的瞬时相位 图,(8c,8d)为采用s0模式的瞬时相位图;
[0045]
图9是本公开一个实施例提供的采用a0模式信号、检查点为f1(600,800)、f2(300,800) 时,聚焦时刻附近的损伤成像指标;
[0046]
图10是本公开一个实施例提供的采用s0模式信号、检查点为f1(600,800)、f2(300,800)时,聚焦时 刻附近的损伤成像指标;图11是本公开一个实施例提供的采用a0模式得到的损伤图像示意图;图12是本公开一个实施例提供的采用s0模式得到的损伤图像示意图。
具体实施方式
[0047]
下面将参照附图1至附图12详细地描述本公开的具体实施例。虽然附图中显示了本公开的具体实 施例,然而应当理解,可以以各种形式实现本公开而不应被这里阐述的实施例所限制。相反,提供这些 实施例是为了能够更透彻地理解本公开,并且能够将本公开的范围完整的传达给本领域的技术人员。
[0048]
需要说明的是,在说明书及权利要求当中使用了某些词汇来指称特定组件。本领域技术 人员应可以理解,技术人员可能会用不同名词来称呼同一个组件。本说明书及权利要求并不 以名词的差异作为区分组件的方式,而是以组件在功能上的差异作为区分的准则。如在通篇 说明书及权利要求当中所提及的“包含”或“包括”为一开放式用语,故应解释成“包含但不限定 于”。说明书后续描述为实施本发明的较佳实施方式,然所述描述乃以说明书的一般原则为目 的,并非用以限定本发明的范围。本公开的保护范围当视所附权利要求所界定者为准。
[0049]
为便于对本公开实施例的理解,下面将结合附图以具体实施例为例做进一步的解释说明, 且各个附图并不构成对本公开实施例的限定。
[0050]
一个实施例中,如图1所示,一种基于全聚焦的lamb波相位成像方法,包括如下步骤:
[0051]
s100:设某一相控阵由n个压电传感器(piezoelectric transducer,pzt)组成。每个pzt 轮流作为激励源,其余pzt作为接受器,以全矩阵捕获的方式获得响应信号集。激励信号根 据每对发射-接收传感器对所需经历的传播距离预先施加逆频散效应以实现频散补偿和能量 聚焦。将同一个pzt接收、其余pzt发射的响应信号叠加以实现能量再次聚焦,共可得到n 组求和信号。
[0052]
该步骤中,示例性地,如图2所示,与线性阵列相比,环形阵列可消除对称镜像损伤
伪 点。该环形阵列由9个pzt组成,用502胶水粘贴在1000
×
1000
×
2mm3t6061铝合金板材上。 分别在铝板的d1(600,800)及d2(700,800)两个位置点模拟损伤。模拟一采用磁铁损伤,利用 a0模式的信号进行检测;模拟二采用通孔损伤,利用s0模式的信号进行检测。针对该铝板 设计横轴、纵轴各100个像素点,共计10000个检查点。针对第m个检查点,每个pzt依次 轮流作为激励源发射,其余pzt接收响应信号,如图3所示,共可获得72个原始响应信号。 将来自同一pzt的响应信号叠加使能量聚焦,共可获得9组求和信号,记为r
jm
(t):
[0053][0054]
其中,i表示激励pzt的序号,j表示接收pzt的序号;r
ij
(t)表示第i个pzt激励,第 j个pzt接收的响应信号。
[0055]
此外,由于lamb波的频散效应同样会导致波包能量弥散,因此需对激励信号根据传播 距离预先施加逆频散效应以使能量聚焦。当激励源pi、检查点fm、接收端pj确定时,从激励 源pi到检查点fm的传播距离li、从检查点fm到接收端pj的传播距离lj则唯一确定,因此, 针对该传播路径“p
i-f
m-p
j”可设计如下激励信号:
[0056][0057]
其中,f(ω)是原始激励信号f(t)的傅里叶变换;k(ω)是波数,与角频率ω相关;
[0058]
lamb波的传播方程可表示为:
[0059][0060]
其中x表示传播距离,s(ω)是预先设计激励信号s(t)的傅里叶变换。当该激励信号的传播 距离x与传播路径“p
i-f
m-p
j”相吻合时,该项数值为1,因此不同频率 对波数造成的影响消失,频散效应得到补偿,能量不再弥散。图4为预先设计针对 li lj=600mm的激励信号,在不同传播距离下的波形图,预先选定的聚焦时刻为0.85ms。 当传播距离为600mm时,波形最窄,幅值最高,能量最大。
[0061]
此外,激励信号聚焦时刻的选取也极为重要。原始激励信号f(t)中初始幅值出现的时刻 即为聚焦时刻。因为设计后的激励信号s(t)是对原始激励信号f(t)施加逆频散效应,为避免激 励信号s(t)被分割成两部分,如图5所示,从零时刻到聚焦时刻的时长应当大于施加逆频散效 应后激励信号波包所持续的时长。本实施例中,考虑到各个“p
i-f
m-p
j”中的最远传播路径, 选定聚焦时刻为1ms。
[0062]
本实施例中,选取不同中心频率及周期数的正弦调制的窄带信号作为原始激励信号f(t)。 采用频率调谐技术来获得合适的单模。针对a0模式,选取周期数为3,中心频率为50hz的 正弦调制的窄带信号作为原始激励信号f(t);针对s0模式,选取周期数为5,中心频率为250hz 的正弦调制的窄带信号作为原始激励信号f(t)。
[0063]
s200:求9组求和信号的希尔伯特包络,再利用希尔伯特变换获得其包络的解析信
号, 根据反正切函数获得其瞬时相位。
[0064]
该步骤中,针对第m个检查点,第j组求和信号的希尔伯特包络可表示为:
[0065][0066]
其中,hilbert(
·
)表示希尔伯特变换。
[0067]
包络信号的解析信号可表示为:
[0068][0069]
因此,包络信号在聚焦时刻对第m个检查点的瞬时相位可由下式计算:
[0070][0071]
针对第m个检查点,9组求和信号在聚焦时刻的瞬时相位向量可定义为:
[0072][0073]
本质上,由上式获得的瞬时相位为希尔伯特包络信号的瞬时相位。之所以不选 择原始求和信号的瞬时相位,是因为原始信号的频率高于希尔伯特包络信号的频率,导致原 始信号瞬时相位在短时间内发生快速变化,其对应的损伤特征难以捕捉。
[0074]
根据上式所描述的瞬时相位求解方法,包络信号中波峰和波谷对应的瞬时相位 为零,瞬时相位函数的周期为π,如图6a至6c所示。图6a至6c分别展示了一个单周期正弦 信号、其对应的希尔伯特变换和由上式获得的瞬时相位。
[0075]
本实施例中,当检查点为f1(600,800)、f2(300,800)时,其中检查点f1(600,800)与损伤点 d1(600,800)重合,来自9个pzt的a0模式求和响应信号(减去健康基线信号)的希尔伯特 包络如图7a,7b所示,s0模式的信号如图7c,7d所示。相应的瞬时相位如图8a至8d所示。 当检查点f1(600,800)与损伤点d1(600,800)重合时,9组求和响应信号同时在聚焦时刻出现损 伤波包,如图7a,7c所示;其9组瞬时相位同时接近零相位,如图8a,8c所示。
[0076]
s300:构建一致性指标衡量n组求和信号的瞬时相位在聚焦时刻的一致性,构建对齐性指 标衡量每组求和信号在聚焦时刻的瞬时相位与零相位的对齐程度,综合考虑一致性指标和对 齐性指标,建立损伤成像指标。
[0077]
该步骤中,当第m个检查点与损伤点重合时,由于损伤对lamb波的反射效应,9组响 应信号中会在同一聚焦时刻同时出现微弱的损伤波包,借助希尔伯特包络可描述波包特征。 由步骤s200可知,包络信号在波峰处的瞬时相位为零。因此,可通过建立指标衡量9个瞬时 相位与零相位的偏差程度,以确定该检查点是否为损伤点。
[0078]
该步骤中,针对第m个检查点,一致性指标定义为:
[0079][0080]
其中,是瞬时相位向量的方差。瞬时相位向量的一致性越高,一致 性指标越大。
[0081]
对齐性指标定义为:
[0082][0083]
其中,是第m个检查点的瞬时相位向量绝对值的均值。对瞬时相 位取均值以避免正负相位相互抵消。瞬时相位向量与零相位的对齐程度越高,对齐性指标越 大。
[0084]
融合一致性指标cim和对齐性指标aim,建立针对第m个检查点的损伤成像指标,如 下式所示:
[0085][0086]
若第m个检查点的损伤成像指标的越大,则该检查点越有可能为损伤点。
[0087]
与单独使用一致性指标cim作为损伤成像指标im相比,对齐性指标aim的引入排除了 瞬时相位向量在非零相位处对齐的情况。反之,与单独使用对齐性指标aim相比,一致性指 标cim的引入允许瞬时相位有一定程度的误差,并进一步放大了损伤点的指标。因此,在构 建损伤成像指标im时,一致性指标cim和对齐性指标aim相辅相成,共同发挥作用。
[0088]
本实施例中,当检查点为f1(600,800)、f2(300,800)时,采用a0模式和s0模式信号得到 的聚焦时刻附近的损伤成像指标分别如图9、图10所示。采用聚焦时刻的损伤指标作为该检 查点的像素值。可以明显看出,当检查点f1(600,800)与损伤点d1(600,800)重合时,其损伤成 像指标远高于非损伤点f2(300,800)。
[0089]
s400:遍历所有检查点,为每个检查点赋予损伤成像指标以获得损伤图像,根据损伤成 像指标的大小可确定损伤点的损伤程度。
[0090]
该步骤中,检查点的损伤成像指标可表征该损伤点的健康状况。
[0091]
本实施例中,采用a0模式和s0模式得到的损伤图像别如图11、图12所示,圆圈代表 真实损伤位置。本公开所定位的损伤位置清晰明确,且与真实损伤位置良好吻合。
[0092]
现有的损伤定位方式大多采用幅值信息作为损伤指标。然而,直达波和边界反射波的幅 值能量均远大于损伤散射波,因此阵列及边界周围的损伤成像指标远高于损伤点,导致损伤 点被淹没。尽管通过限制损伤成像区域可消除这一影响,但该策略进一步导致被测结构存在 成像盲区;其次,幅值成像中的旁瓣、光栅等干扰因素使得真实损伤点不够清晰、明确。现 有的基于相位相干因子和符号相干因子的相位成像技术未考虑lamb波的频散特性,导致响 应信号能量弥散,难以应用于lamb波。基于多重信号分类的相位成像技术又依赖于窄带信 号提取技术,且需预估损伤数目作为先验知识,使其难以在工程中进一步应
用。与幅值成像 相比,本公开利用阵列响应信号中损伤散射波相位对齐的特点,排除了直达波及边界反射波 的影响,将损伤区域扩展至整个铝板,并且由于瞬时相位向量当且仅当检查点与损伤点一致 时发生对齐现象,因此旁瓣、光栅得到良好抑制;与现有的相位成像技术相比,本公开采用 响应信号叠加及频散预补偿两种能量聚焦策略,使信号能量聚焦于损伤点,对lamb波具有 良好的适应性,无需损伤数目先验,并且进一步放大了损伤特征。因此,采用本公开的技术 方案可获得完整、准确、清晰的损伤图像。
[0093]
以上结合具体实施例描述了本公开的基本原理,但是,需要指出的是,在本公开中提及 的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本公开的各 个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用, 而非限制,上述细节并不限制本技术为必须采用上述具体的细节来实现。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。