1.本发明涉及一种用于自动更换地面清洁设备的清洁布的更换站。
2.本发明还涉及一种用于清洁地面的地面清洁设备,其具有:壳体、用于使壳体相对于地面运动的运动装置、带有清洁布的清洁装置以及用于导航(即地点、运动和引导)和控制运动装置的控制器。
3.最后,本发明涉及一种用于在前述的地面清洁设备中借助于前述的更换站来更换清洁布的方法。
背景技术:
4.本发明的应用范围主要在于湿式和润湿清洁设备的范围,例如擦拭机器人,其必要时具有用于清洁住宅、办公室或其他空间布置中的空间的抽吸功能。为此借助于已知的机器人技术使清洁布在地面上运动,清洁布在此进行地面的清洁。清洁布由于污物吸收而相对快速地消耗,从而在相对短的时间间隔中更换清洁布是必要的。待清洁的面积在此可以具有这样的尺寸,其意味着用于清洁的显著的时间耗费并且需要清洁布的部分地多次更换。
5.为此,包括用手手动地更换布并手动地填充布置在清洁设备中的用于清洁液的罐、清洁液的无意的洒出。这些过程本身与清洁设备的目的相矛盾,即自主地作为机器人进行地面的清洁。此外不利的是,清洁液位于清洁设备中并且必须一起运动,这消耗额外的能量,其减少清洁设备的使用时间。此外,清洁布必须手动地计数、再填充并随后处置。
6.自动地(即借助于机器人)清洁大的地面的实际目标由于经常需要人员的介入而失败。
7.由ep 3 542 695 a1公知了一种用于自动润湿在擦拭机器人处的清洁布的基站。此外,ep 3 366 180 a1公开了一种更换站,用于完全替换功能模块,如清洁元件、液体罐或刷元件,即更换站清洁工具。
技术实现要素:
8.因此,本发明要解决的技术问题是,使用于地面清洁设备的清洁布的更换得到改进并且进一步自动化。
9.前述技术问题根据本发明根据第一教导通过开头所述的更换站来解决,该更换站具有:用于待容纳的清洁布的容纳装置;用于待输出的清洁布的输出装置;用于输送清洁布的运输装置;以及润湿装置,其中,运输装置设置用于将清洁布从地面清洁设备的递送位置输送到容纳装置,其中,运输装置设置用于将清洁布从输出装置输送到递送位置以递送到地面清洁设备处,并且其中,润湿装置设置用于在递送到地面清洁设备处之前润湿待递送的清洁布。
10.更换站实现了自动更换用于地面处理设备的清洁布。因此,可以清洁较大的地面面积,而不需要人员的手动干预。此外,在更换站中对待递送的清洁布的润湿是有利的,因
为一方面可在更换站中储存较大量的清洁液体,并且另一方面可将地面清洁设备构造成不带有用于清洁液体的存储部。由此,通过地面清洁设备使较少的重量运动并且因此较长的运行时间是可能的。
11.润湿装置可以借助于泵或借助于重力和阀将清洁液体输出给待递送的清洁布。该技术本身是已知的并且在此可以有利地使用。
12.此外,可以设置锁定器件,用于将地面清洁设备位置精确地定位在递送位置处。因此清洁布可以可靠地递送到更换站处并且由更换站接收。
13.所述运输装置用于在更换站内运输清洁布,以能够自动化地进行清洁布的替换。在此,运输装置可以以不同的形式构造,一方面优选地可以构造成输送带,另一方面可以考虑构造成线性运动或者转动的盘。无论如何,运输装置都实现了清洁布从输出装置到递送位置以及从递送位置到容纳装置的运动。
14.此外,地面清洁设备或单独的驱动器件可以驱动运输装置。在通过地面清洁设备进行驱动时,可以使用其马达式驱动器来使输送带运动,从而可以避免更换站内的附加的驱动器件。地面清洁设备为此在递送位置中如此布置,使得至少一个驱动轮与运输装置的表面接触,并且通过控制用于驱动轮的驱动器可以使运输装置运动。
15.备选地,更换站本身可以具有驱动器件,即一个或多个电动马达和蓄电池或电池组作为能量供应。电动马达然后可以借助于已知的传动装置驱动运输装置。为此在更换站中设置合适的控制器。
16.为了递送用过的、即脏的和/或待干燥的清洁布,将清洁布从地面清洁设备放置到运输装置上,然后运输装置将递送的清洁布输送到容纳装置的位置并且必要时直接输送到容纳装置中。为此,运输装置可以延伸至容纳装置的上边缘,并且清洁布可以被转移、尤其是落入容纳装置的容纳容器中。
17.容纳装置可以替代地具有用于将待容纳的清洁布输送到容纳容器中的输送装置。输送装置可以构造为单独的输送带,该输送带可以通过一个端部下降到运输装置上。然后,待容纳的清洁布通过利用运输装置的运动被放置到输送带上并且利用输送带沿容纳装置的方向运输。然后,在其上可以连接另一个输送机构,该输送机构借助于辊和导向面将待容纳的清洁布输送到容纳容器中。
18.在用于处置或用于处理(例如通过清洗清洁布)的预定时间之后,必须与容纳容器的填充程度无关地将布置在容纳装置的容纳容器中的清洁布移出。为此,以优选的方式设置时间测量装置,用于确定用于处置所容纳的清洁布的处置时间点。时间测量装置可以是更换站的控制器的一部分,在该控制器中还处理其它状态测量值,如容纳容器的填充度,以确定处置时间点。此外,容纳容器还可以设有袋,该袋使得处置所容纳的清洁布变得容易。
19.输出装置用于在更换站中提供新的清洁布。为此,以优选的方式设置,输出装置具有至少一个输出容器,并且每个输出容器设置用于多个新的清洁布;并且具有用于输出各个清洁布的分离设备。
20.在最简单的情况下,设置其中堆叠有清洁布的输出容器。清洁布在此可以全部是一种类型的清洁布,例如标准清洁布,其适用于润湿清洁或湿式清洁多种类型的地板。清洁布也可以是不同类型的,它们以预定的顺序布置在输出容器中并且按照预定的清洁计划依次地被递送到地面清洁设备处。
21.此外,清洁布可以具有识别器件,例如应答器,优选rfid芯片(射频识别)或铁磁条,并且容纳装置和/或输出装置具有读取设备,例如rfid读取器或簧片触点,用于认出识别器件。因此,至少可以对所容纳的和/或输出的清洁布进行计数。必要时也可借助于识别数据识别布本身,尤其是关于清洁布的类型。
22.为了使用更换站来输出不同的清洁布,特别有利的是,设置至少两个用于不同类型的清洁布的输出容器。特别是可以为每种类型的清洁布设置单独的输出容器。由此能够实现针对不同类型的清洁布的个性化的输出顺序,从而清洁布的更换能够个性化地并且根据空间情况实现并且不通过清洁计划来预设。
23.上述技术问题根据本发明通过开头所述的用于清洁地面的地面清洁设备如此解决,其中设置用于确定清洁布的功能状态的检测装置,其中控制器设置用于根据检测装置的检测信号导航至更换站,其中设置用于自动地输出和容纳清洁布的保持器件,其中所述保持器件设置用于将清洁布输出到更换站处并且由更换站容纳清洁布。
24.检测装置可以以不同的方式确定清洁布的功能状态。干净和脏的状态之间的区分可以通过光学器件来进行。确定清洁布是否足够润湿或过于干燥可通过与清洁布接触的一个或多个湿度传感器来完成。此外,可以考虑每个清洁布预设的最大的待清洁面积,并且当达到最大面积尺寸时,检测装置确定清洁布的不足的功能状态。最后,可以考虑清洁布的最大使用持续时间,并且当达到最大使用持续时间时,检测装置确定清洁布的不足的功能状态。
25.地面清洁设备的控制器是已知的并且用于自动地控制运动装置。为此存在已知的定位系统,以确定在空间中的当前位置并且建立至少临时的地图。在地图中记录至少一个空间以及充电站和更换站的位置。地面清洁设备根据自动的路线和/或按照运行计划来导航并且运动通过空间,其中,地面的清洁通过清洁布来进行。
26.用于自动地输出和容纳清洁布的保持器件以优选的方式具有磁性元件形式的或尼龙搭扣元件形式的保持元件。在具有磁体的设计方案中,在清洁装置处设置一个或多个磁性触点,这些磁性触点布置成使得同样设有相应的磁性触点的清洁布可仅通过磁力来固定。在具有尼龙搭扣的设计方案中,相应的尼龙搭扣元件不仅设置在清洁装置处而且还设置在清洁布处。
27.保持器件还可以具有可移动的和/或可枢转的销,用于将清洁布从用于输出清洁布的保持器件松开。销可以机电式地朝清洁布方向运动,并且产生清洁布与保持器件的间距。在足够的间距的情况下,磁性触点或尼龙搭扣元件脱离接触,并且清洁布可因此从保持器件移出并且被输出到更换站处。
28.保持器件可以附加地具有下降机构,用于使保持器件为了容纳清洁布朝清洁布的方向下降。在更换站处输出新的清洁布时,运输器件将清洁布优选输送到地面清洁设备下方的递送位置,从而通过保持器件的下降使保持器件的保持元件与清洁布的保持器件足够接近或接触。因此,将新的清洁布固定在地面清洁设备处。
29.除了用清洁布清洁地面之外,地面清洁设备也可以以已知的方式具有抽吸单元和必要时具有用于机械地预清洁地面的刷单元。
30.上述技术问题根据本发明还通过用于在地面清洁设备中更换清洁布的方法并且借助于更换站解决,其中,尤其可以使用上述更换站和/或上述地面清洁设备。
31.首先,地面清洁设备相对于更换站导航到递送位置中,其中,控制器由扫描设备采集位置数据和空间数据,并且地面清洁设备基于这些数据运动和定位。然后,将待由更换站容纳的清洁布从地面清洁设备递送到更换站,并且将清洁布输送到容纳装置。相反地,随后将待从更换设备输出的清洁布从输出装置输送到地面清洁设备。此外,在输出装置和递送位置之间借助于润湿装置将润湿剂以预设的量转移到待输出的清洁布上。
32.因此实现了不必人为干预的清洁布的自动更换。
33.可使用最大剂量的0%至100%范围内的润湿剂的量来进行新的清洁布的润湿。0%的值表示没有施用湿润剂。例如,在没有液体出现的新的抛光布的情况下。因为抛光布通常在先前的润湿清洁或湿式清洁之后使用,所以在之前的方法过程中将大于0%的润湿剂的量施用到新的清洁布上。
34.为了定期更换清洁布,有利的是,通过对清洁布的计数来确定输出装置和容纳装置的填充状态。为此,清洁布可以设有上面所述的那些识别器件,所述识别器件实现了计数和其他特征的记录。
35.此外,该方法还可以如此改进,使得利用输出装置可选地从至少两种不同类型的清洁布中输出清洁布。因此,清洁布的更换不仅可以用相同类型的布进行,而且也可以在不同类型的布之间进行,即例如在标准清洁布和抛光布之间进行。
36.在现有技术中已知的是,地面清洁设备、例如抽吸和擦拭机器人借助清洁计划来进行清洁。在此,清洁计划可以由使用者例如通过程序(在智能手机上的应用程序)来确定或者在检测至少一个空间期间得出。因此,该方法尤其是也这样构造,使得基于预定的清洁计划来清洁至少一个空间,使得在清洁地面期间检测清洁布的功能状态,并且当清洁布的功能状态不再足够时,地面清洁设备被导航到更换站。
37.然后,如果在清洁期间确定地面铺层有变化并且需要改变清洁布的类型,则优选地,地面清洁设备为了更换清洁布被导航到更换站,并在更换站处由与接下来待清洁的地面铺层匹配类型的输出的清洁布来取代地面清洁设备所容纳的清洁布。因此,本身已知的清洁计划也可以有利地在所描述的方法实施方案中应用。
38.在进一步优选的方式中,为了减少清洁布的更换次数,在更换到下一种类型的清洁布之前,分别依次清洁具有相同地面铺层的地面区段。由此不仅减少了地面清洁设备返回更换站的行驶耗费,而且避免了更换还没有被完全使用的清洁布。
39.之前描述了更换站和用于在地面清洁设备中并且借助用于至少部分自主行驶的机器人的更换站来更换清洁布的方法。此外,更换站也可以用于非自主的清洁器具,例如手动操作的擦拭抽吸机。在这种情况下,固定在手持式吸尘器上的带有擦拭单元和固定在其上的清洁布的清洁附件手动地移动到递送位置,以随之进行清洁布的自动更换。在此也得到如下优点,即使用者不必手动地干预更换过程。
40.此外,更换站也可以用于更新已经使用过的清洁布。在这种情况下,在递送位置处,已经使用过的、例如不再足够湿的或润湿的清洁布被递送到更换站处。然后,清洁布不被容纳装置容纳,而是被输送到润湿装置,重新被供给清洁液并且重新被输送回递送位置并且重新被递送到地面清洁设备。
41.此外,更换站也可以配备有用于为地面清洁设备中的蓄电池充电的附加的充电装置。因此,除了更换站之外不需要另外的站。
附图说明
42.下面借助于实施例参照附图对本发明进行说明。其中
43.图1-3示出了根据本发明的更换站和根据本发明的地面清洁设备在三种不同方法状态中的第一实施例,和
44.图4示出了具有两个输出容器的根据本发明的更换站的第二实施例,
45.图5示出了根据本发明的第二更换站和根据本发明的第二地面清洁设备的一部分。
具体实施方式
46.在下面对根据本发明的不同实施例的描述中,具有相同功能和相同作用方式的构件和元件设有相同的附图标记,即使构件和元件在不同的实施例中在其尺寸或形状方面可能具有差异。
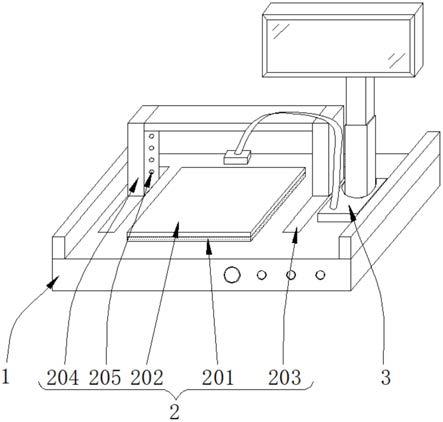
47.下面借助于图1至3说明更换站2的第一实施例,其中,图1至3的区别在于,它们示出了在实施用于更换清洁布的方法期间的不同的运行状态。
48.用于自动更换地面清洁设备6的清洁布4的更换站2首先具有用于待容纳的清洁布4的容纳装置8和用于待输出的清洁布4的输出装置10。此外,设置有用于输送清洁布4的运输装置12和润湿装置14。运输装置12设置用于将清洁布4从地面清洁设备6的递送位置16输送至容纳装置8。运输装置12同样设置用于将清洁布4从输出装置10输送至递送位置16,以递送到地面清洁设备6处。此外,设置用于将待递送的清洁布4在递送到地面清洁设备6处之前对其进行润湿的润湿装置14。
49.在图1所示的运行状态中,地面清洁设备6这样定位在更换站2上,使得与之连接的、用过的并且待递送的清洁布被放到运输装置12上并且因此被递送到更换站2处。
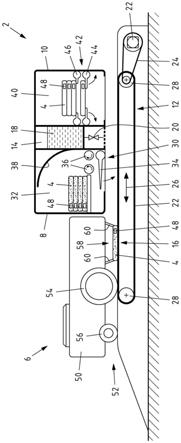
50.运输装置12构造成输送带22,该输送带可以通过马达驱动器22和传动器24在两个输送方向上(见双箭头26)被驱动。输送带经由两个导向轮28引导。因此,输送带22由布置在更换站2中的单独的驱动器件来驱动。
51.此外,容纳装置8设有输送装置30,用于将待容纳的清洁布4输送到容纳容器32中。输送装置30(其工作原理在图2中示出)为此具有单独的输送斜坡34,该输送斜坡能够可枢转地向下和向上运动。在图2所示的位置,输送斜坡34向下下降,待容纳的清洁布4通过输送带22的运动在输送斜坡34上向上移动。由此,待容纳的清洁布4与两个被驱动的输送辊36接触,这些输送辊将清洁布4沿着导向面38输送到容纳容器32中。在那里存放被容纳的、用过的清洁布4直至处置。
52.设置未示出的时间测量装置,用于确定用于处置被容纳的清洁布4的处置时间点。因此,避免了用过的清洁布4过长时间地放在容纳容器32中。时间测量装置可以是更换站2的控制器的一部分,所述控制器能够经由本身已知的无线通信路径向用户发送通知。
53.图3示出了输出装置10和润湿装置14的工作方式。输出装置10在图1至3中具有输出容器40,在该输出容器中布置有多个新的待输出的清洁布4,这些清洁布当前成堆地放置。因此,输出容器40设置用于多个新的清洁布4并且分离装置42用于输出各个清洁布4。分离装置42具有彼此上下布置的杆组件44和46,这些杆组件依次枢转,以依次将各个清洁布4向下放置到输送带22上。
54.通过输送带22将输出的新的清洁布4输送到润湿装置14下方。当新的清洁布4放置在润湿装置14下方时(这可以经由本身已知的传感器检测到),润湿装置14借助重力和阀20将清洁液18输出到待递送的清洁布4处,阀20也由多个开口组成。因此,待递送的新的清洁布4被充分地润湿预定的量。
55.接下来,被润湿的清洁布4被输送到地面清洁设备6下方的递送位置并且被地面清洁设备6容纳。这样的布置然后再次对应于图1中所示的布置。
56.此外,清洁布4可以具有应答器形式的识别器件(未示出),例如rfid,或铁磁条。此外,容纳装置8和/或输出装置10可以具有(同样未示出的)用于应答器的读取设备,例如rfid读取器,或者用于认出该识别器件的簧片触点。借助识别器件可以检测、尤其是计数被输送的清洁布4。
57.在图1至图3所示的实施方式中,输出装置10包括输出容器40,从而可以将仅一种类型的清洁布4存放在其中,或者也可以以预定顺序将不同类型的清洁布4堆放。
58.图4示出了根据本发明的具有输出装置10的更换站2的第二实施例,所述输出装置具有两个用于不同类型的清洁布4、4’的输出容器40和40’。因此,可以根据清洁计划或根据当前的个性化要求从两种类型的清洁布4、4’中选择。为此在更换站2的控制器中设置相应的数据传输器件、决定器件和控制器件。
59.在图1至4中还示出用于清洁地面的地面清洁设备6。在此,地面清洁设备6用于清洁室内或室外的地面、即在内和/或在外清洁可以是合适的。地面清洁设备6尤其也可以被称为擦地机器人,其此外还可以具有抽吸单元和必要时具有刷单元。
60.地面清洁设备6包括壳体50、具有两个驱动轮54的运动装置52以及用于使壳体50相对于地面移动的滚轮56。相应于清洁功能设置具有清洁布4的清洁装置58以及用于导航、即定位、移动和引导并控制运动装置52的控制装置(未详细示出的)。
61.此外,还设置有用于确定清洁布4的功能状态的检测装置。功能状态可根据用清洁布4清洁的区域或时间段基于清洁或脏状态、潮湿或干燥状态而不同。为此,存在相应的地面清洁设备6的光学传感器、湿度传感器、时间测量装置或导航控制器的功能。此外,控制器设置用于根据检测装置的检测信号导航至更换站2。
62.清洁装置58具有用于自动地输出和容纳清洁布4的呈可枢转的销形式的保持器件60,并且保持器件60设置用于将清洁布4输出到更换站2处、尤其到运输装置12处并且使更换站2容纳清洁布4。为此,保持器件60具有磁铁形式的或尼龙搭扣形式的保持机构,然后清洁布4相应地设有相应的保持元件。
63.在所示的实施例中,保持器件60设置有可移动的或可枢转的销,用于将清洁布4与保持机构松开,以输出和重新容纳清洁布4。保持器件60因此具有用于使保持器件60为了容纳清洁布4而朝清洁布4方向下降的下降机构。在所示的实施例中,下降机构通过可枢转的销实现。
64.图5示出了更换站2的运输装置12的另一种变型方案,该运输装置构造为可运动的盘70,清洁布4可以放置在该盘上。盘70于是可以成为线性的(双箭头72)或旋转的(双箭头74)。然后,地面清洁设备6将用过的清洁布4从递送位置16递送到盘70处,所述盘然后通过线性运动或转动运动将清洁布4输送到容纳装置8。然后,以相同的方式可以由输出装置10将新的清洁布4从输出装置10递送到递送位置16处,在该递送位置处,清洁布4随后被地面
清洁设备6接收。
65.此外如在图5中所示,在更换站中不存在单独的驱动器,而是地面清洁设备6驱动运输装置12或盘70。为此,运动装置52的驱动轮54下降,直至该驱动轮与盘70接触,并且在驱动轮54相应转动时,盘70线性地运动或旋转。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。