1.本发明涉及车辆的制动领域,更具体地涉及驻车制动系统用致动机构。
背景技术:
2.如图2a和图2b所示,根据现有技术的驻车制动系统用致动机构包括壳体10和安装于壳体10的轴20。该轴20能够在动力源的驱动下沿着其轴向相对于壳体10进行往复的相对运动,从而能够带动棘爪与变速器的齿轮接合和分离,来实现和解除驻车制动功能。壳体10包括大致圆筒形状的壳体主体101和设置于壳体主体101的一端处用于封闭壳体主体101的开口的端盖102。轴20的一部分位于壳体主体101内,另一部分穿过端盖102并延伸到整个壳体10的外部。在上述致动机构工作的过程中,需要确定轴20的位置,因此通常该驻车制动系统用致动机构还包括在轴20的位于壳体10的外部的部分上设置的能够随着轴20一起运动的磁体30,以通过对应的霍尔传感器来获取轴20的位置。
3.为了使得上述方案获得精确的测量结果,需要保证磁体30相对于壳体10整体不能转动。在现有的方案中,磁体30的限位面30s与轴20的对应的限位面20s1实现在周向上的相对固定定位,轴20的限位面20s2与壳体10的端盖102的对应的限位面102s实现在周向上的相对固定定位,端盖102通过其限位凸耳102p与壳体主体101形成的缺口101c配合实现在周向上的相对固定定位。这样,通过壳体主体101、端盖102、轴20和磁体30两两之间的机械结构配合,最终能够实现磁体30相对于壳体主体101在周向上相对固定定位,但是这种相对固定定位是通过多个部件之间的机械结构配合实现的,因此尺寸链较长,所产生的累积误差将导致磁体30相对于壳体主体101的相对固定定位的效果不佳。另外,实现上述一系列机械结构配合的成本也较大。
技术实现要素:
4.鉴于上述现有技术的问题而做出了本发明。本发明的目的在于提供一种新型的驻车制动系统用致动机构,使得该致动机构能够减轻由于较长的尺寸链所产生的累积误差导致磁体相对于壳体的相对固定定位的位置不准确或者效果不佳的问题。
5.为了实现上述发明目的,本发明采用如下的技术方案。
6.本发明提供了一种如下的驻车制动系统用致动机构,所述致动机构包括:
7.壳体;
8.轴,所述轴以能够在其轴向上相对于所述壳体往复运动的方式安装于所述壳体;以及
9.导向件,所述导向件固定设置于所述壳体;
10.磁体组件,所述磁体组件以能够随着所述轴进行所述往复运动的方式安装于所述轴,并且所述磁体组件具有周向限位件,所述周向限位件与所述导向件形成适配导向关系并且通过该适配导向关系使得所述磁体组件在所述轴的周向上不能相对于所述壳体转动。
11.优选地,所述周向限位件具有导向槽或导向孔,所述导向件形成有沿着所述轴向
20s1、20s2限位面 30磁体 30s限位面
26.1壳体 11壳体主体 111主体凸耳 111h1连接件安装孔 111h2导向件安装孔 12端盖 121内周部 121h端盖中央通孔 122外周部 123加强筋 124端盖凸耳 124h安装通孔 13导向件 14连接件
27.2轴
28.3磁体组件 31磁体 31h磁体中央通孔 32周向限位件 321卡条 322导向槽
29.4霍尔传感器。
具体实施方式
30.下面参照附图描述本发明的示例性实施方式。应当理解,这些具体的说明仅用于示教本领域技术人员如何实施本发明,而不用于穷举本发明的所有可行的方式,也不用于限制本发明的范围。
31.以下参照附图说明根据本发明的驻车制动系统用致动机构的具体实施方式。在说明书中,除非另有说明,否则轴向、径向和周向分别是指轴的轴向、径向和周向。
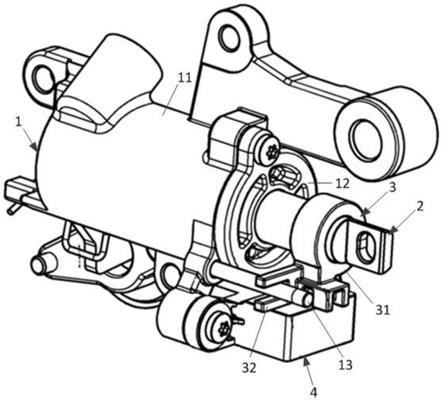
32.如图1a和图1b所示,根据本发明的一实施方式的驻车制动系统用致动机构包括组装在一起的壳体1、轴2、磁体组件3和霍尔传感器4。
33.具体地,在本实施方式中,壳体1包括壳体主体11、以能够拆卸方式固定安装于壳体主体11的端盖12、固定安装于壳体主体11的导向件13以及用于将端盖12固定安装于壳体主体11的连接件14。
34.壳体主体11具有大致圆筒形状并且内部形成有用于收纳轴2的收纳空间。在壳体主体11的用于安装端盖12的端部,壳体主体11形成有从其外周面朝向壳体主体11的径向外侧凸出的三个主体凸耳111。三个主体凸耳111在壳体主体11的周向上大致均匀分布,其中两个主体凸耳111形成有沿着壳体主体11的轴向延伸的连接件安装孔111h1(图中仅示出一个设置有连接件安装孔111h1的主体凸耳111),用于供连接件14插入安装;剩余的一个主体凸耳111形成有沿着壳体1的轴向延伸的导向件安装孔111h2,用于供导向件13插入安装。
35.端盖12可以由铝材料制成并且具有大致圆盘形状。端盖12以其中心轴线与壳体主体11的中心轴线一致的方式固定安装于壳体主体11,并且能够从壳体主体11拆卸。端盖12形成有内周部121、位于内周部121的径向外侧的外周部122以及位于内周部121和外周部122之间的加强筋123。内周部121沿着端盖12的周向连续地延伸以形成圆环形状,从而在内周部121的中央部位形成沿着端盖12的轴向贯通的且供轴2插入穿过的圆形的端盖中央通孔121h。外周部122沿着端盖12的周向连续地延伸以形成圆环形状。多个加强筋123分别沿着端盖12的径向从内周部121延伸到外周部122,用于使得内周部121和外周部122连接在一起。
36.端盖12还包括从外周部122朝向径向外侧凸出的两个端盖凸耳124,各端盖凸耳124形成有沿着端盖12的轴向贯通的安装通孔124h。这两个端盖凸耳124与形成有连接件安装孔111h1的两个主体凸耳111对应,使得经由穿过成对的端盖凸耳124和主体凸耳111的连接件14能够将端盖12固定安装于壳体主体11。在本实施方式中,连接件14例如可以是螺栓。
37.导向件13为沿着壳体主体11的轴向延伸一定长度的销。导向件13的一端固定安装于壳体主体11的形成有导向件安装孔111h2的主体凸耳111,使得导向件13与壳体主体11固
定在一起;并且导向件13从该主体凸耳111朝向远离壳体主体1的方向延伸。
38.进一步地,在本实施方式中,轴2以能够相对于壳体1在轴2的轴向上往复运动的方式安装于壳体1,并且轴2的中心轴线与壳体主体11的中心轴线一致。轴2的一部分位于壳体主体11的收纳空间内,并且轴2穿过端盖12的端盖中央通孔121h,使得轴2的另一部分从端盖12伸出、即从壳体1伸出。轴2能够在未示出的驱动源(例如,液压机构)的带动下进行上述往复运动,从而驱动棘爪与设置于变速器的齿轮接合和分离,以实现和解除驻车制动功能。
39.进一步地,在本实施方式中,磁体组件3安装于轴2的从端盖12伸出的部分并且能够随着轴2进行在轴向上的往复运动,但是磁体组件3和轴2都不能相对于壳体1转动。具体地,磁体组件3包括彼此固定在一起的磁体31以及周向限位件32。
40.磁体31具有圆环形状并且形成有沿着轴向贯通的磁体中央通孔31h,磁体31以轴2插入穿过磁体中央通孔31h的方式套装于轴2的裸露在壳体主体11外的适当部位。磁体31与轴2之间以不能相对移动的方式固定。磁体31的用于形成通孔的内周面与轴2的上述适当部位的外周面相匹配。这样,当通孔为非圆形孔且该适当部位为非圆柱形状时,磁体31在周向上不能相对于轴2转动。
41.周向限位件32形成有朝向磁体31的一侧延伸且并排配置的两根卡条321以及位于两根卡条321之间的导向槽322。两根卡条321位于与磁体31的中心轴线正交的同一平面内并且沿着与中心轴线正交的同一方向延伸,两根卡条321具有相同的形状和尺寸。进一步地,导向槽322的由两根卡条321限定的宽度可以与导向件13的外径匹配,使得导向槽322能够与导向件13精确匹配。这样,当导向件13穿过导向槽322时,两根卡条321以夹着导向件13的方式位于导向件13的两侧,从而实现磁体组件3相对于壳体1在周向上的良好的相对固定定位效果,使得磁体组件3在轴2的周向上不能相对于壳体1转动;另外,由于导向件13穿过导向槽322使得将磁体组件3安装于轴2或者从轴2拆卸的过程中,导向件13能够用于引导磁体组件3的安装和拆卸。而且,由于导向件13沿着轴向延伸,因而当磁体组件3随轴2同步轴向往复运动时,磁体组件3可藉由卡槽322被导向件13可无障碍地轴向导向。
42.在本实施方式中,霍尔传感器4设置于壳体1且与磁体组件3的磁体31对应。这样,通过霍尔传感器4能够确定轴2的位置。
43.应当理解,上述实施方式仅是示例性的,不用于限制本发明。本领域技术人员可以在本发明的教导下对上述实施方式做出各种变型和改变,而不脱离本发明的范围。另外,还进行如下补充说明。
44.(i)虽然在以上的具体实施方式中没有明确说明,但是应当理解,在端盖12的内周部121和外周部122之间的部分中,在相邻的两个加强筋123之间的孔是在轴向上非贯通的盲孔。加强筋123能够提高整个端盖12的结构强度。
45.(ii)采用以上的具体实施方式中所述的技术方案,不仅能够实现磁体组件3与壳体主体11在周向上的良好的相对固定定位效果,而且与背景技术中所述的用于实现相对固定定位的机械结构相比,降低了加工难度和加工成本;进一步地,由于导向件13沿着轴向延伸,因而当磁体组件3随轴2同步轴向往复运动时,磁体组件3可藉由卡槽322被导向件13无障碍地轴向导向,而且对磁体组件3安装于轴2的安装过程以及将磁体组件3从轴2拆卸的拆卸过程进行。
46.(iii)虽然在以上的具体实施方式中没有明确说明,但是应当理解,磁体31与轴2
之间可以具有轴向连接机构,使得经由该轴向连接机构磁体组件3能够随着轴2在轴向上相对于壳体1进行往复的相对运动。
47.(iv)导向槽322不限于长条形的开口槽,而还可以是例如c形槽,或者封闭的长条孔或圆孔,只要该导向槽或导向孔能够与导向件13配合防止磁体31沿周向转动即可。
48.(v)另外虽然在以上的具体实施方式中说明了采用霍尔传感器4与磁体组件3配合来识别轴2的位置,但是本发明不限于此,也可以采用其它的磁传感器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
