1.本发明涉及无刷直流电机控制领域,具体涉及一种基于线电压的无刷直流电机转子位置估算方法及系统。
背景技术:
2.无刷直流电机属于永磁同步电机的一种,具有效率高,响应快,噪音小等优点,在各个工业领域中都有广泛的应用。
3.无刷直流电机为了获得准确的转子位置信息,一般采用有位置传感器和无位置传感器的方法,有位置传感器的方法通常采用电磁式、霍尔式或光电式等位置传感器对转子位置进行检测,但上述传感器的应用会给控制系统带来了一些缺点,如增加电机的体积、重量和成本、对安装精度要求高、增加生产工艺的难度;无位置传感器的方法通常采用反电势法和状态观测器法,它在中高速段算法的研究已较为成熟,可实现较好的运行特性,但电机进行零低速运行时,每相的反电动势过小难以检测,会影响电机的控制性能。
技术实现要素:
4.本发明提供了一种基于线电压的无刷直流电机转子位置估算方法及系统,以解决电机在启动前无法准确获得转子位置的问题。本发明采用线电压的方法,将求出的线反电动势转化为转子位置的数字信号,提供了一种能精确测量无刷直流电机转子位置的方法,提高了检测转子位置的准确性。
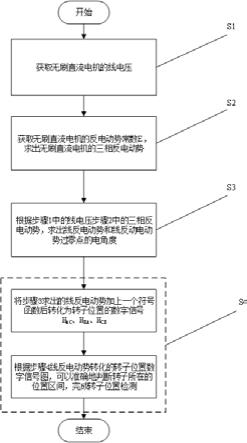
5.一种基于线电压的无刷直流电机转子位置估算方法,包括如下步骤:
6.步骤1:获取无刷直流电机的线电压;
7.步骤2:获取无刷直流电机的反电动势常数e,求出无刷直流电机的三相反电动势;
8.步骤3:根据步骤1中的线电压和步骤2中的三相反电动势,求出线反电动势和线反电动势过零点的电角度;
9.步骤4:将步骤3求出的线反电动势加上一个符号函数后转化为转子位置的数字信号h
ac
、h
ba
、h
cb
;
10.步骤5:根据步骤4线反电动势转化的转子位置数字信号图,可以准确地判断转子所在的位置区间,完成位置检测。
11.进一步地,所述步骤1中无刷直流电机的线电压,是基于线电压采集电路,采用运放的形式,分别采集无刷直流电机的a、b、c三相中任意两相的电压,得到无刷直流电机的线电压u
ac
、u
ba
、u
cb
。
12.进一步地,所述步骤2的具体方法如下:获取无刷直流电机的反电动势常数e,求出三相反电动势为:
13.ea=e(sinωt k3sin3ωt k5sin5ωt .. knsinnωt)
14.[0015][0016][0017]
其中,ea、eb、ec是三相定子的反电动势,e是电机的反电动势常数,ω是电机谐振的角频率,k3,k5...kn是反电动势波形中奇次谐波的系数,n是奇数,k是电机的开环增益常数,t是惯性环节时间常数。
[0018]
进一步地,所述步骤3的具体方法如下:
[0019]
忽略高次谐波后,将步骤2求出的无刷直流电机的三相反电动势进行化简,得线反电动势为:
[0020][0021][0022][0023]
其中,e
ac
、e
ba
、e
cb
是三相定子的线反电动势,e是电机的反电动势常数,ω是电机谐振的角频率;
[0024]
在一个电周期内,线反电动势的过零点分别为在一个电周期内,线反电动势的过零点分别为该组过零点依次滞后于反电动势过零点的电角度,因此与定子电流换相点同相位,所以得出线反电动势过零点的相位就是电机换相点的相位。
[0025]
进一步地,所述步骤4的具体方法如下:
[0026]
给根据步骤3求出的无刷直流电机的线反电动势e
ac
、e
ba
、e
cb
加一个符号函数sgn(x),得到表达式为:
[0027][0028][0029][0030]
其中,h
ac
、h
ba
、h
cb
是三相定子的线反电动势转换的数字信号,e是电机的反电动势常数,ω是电机谐振的角频率,sgn(x)是一个符号函数,当x大于0时,符号函数sgn(x)为1,当x小于0时,符号函数sgn(x)为0;
[0031]
最终得到的无刷直流电机的线反电动势e
ac
、e
ba
、e
cb
转换的数字信号h
ac
、h
ba
、h
cb
,只需明确符号函数中线反电动势的值大于零还是小于零,就知道数字信号的高电平和低电平,从而得到数字信号的上升沿和下降沿。
[0032]
进一步地,所述步骤5中,当电机正转时,以电机转子位置所处区间ⅰ对应的数字信
号101时,运行60
°
电角度后,线反电动势e
cb
过零点对应的数字信号发生跳变,此时电机转子位置所处区间ⅱ对应的数字信号为100,依次类推得电机转子位置为101
→
100
→
110
→
010
→
011
→
001。
[0033]
一种使用基于线电压的无刷直流电机转子位置估算方法的系统,系统包括:转速环pi控制器单元、电流环pi控制器单元、pwm发生器单元、换相控制单元、电流检测单元、无刷直流电机单元、线电压采集单元、线反电动势估算单元、过零点检测单元、转速计算单元、相位补偿单元;
[0034]
所述转速环pi控制器单元分别与电流环pi控制器单元、电流检测单元连接,用于将反馈来的实际转速与给定的转速作差,然后经过pi调节,得到期望的参考电流值,再与反馈来的电流值作差,得到一个准确的电流值;所述电流环pi控制器单元分别与pwm发生器单元、换相控制单元、无刷直流电机单元连接,用于将反馈得到的准确电流值,经过pi控制器调节,从而得到pwm的占空比;所述无刷直流电机单元分别与线电压采集单元、线反电动势估算单元、过零点检测单元连接,用于计算低通滤波器产生的相位延迟角度,并将其转换为所需延迟的时间,再对线反电动势信号进行延迟,从而得到转子位置的信号;所述转速计算单元和相位补偿单元、换相控制单元连接,用于补偿转子位置过零点的相位,从而估算出准确的转子位置信号,完成转子位置估算。
[0035]
本发明至少包括以下有益效果:
[0036]
(1)本发明采用线电压的无刷直流电机转子位置估算方法,电机在低速运行时,电机的线电压幅值是由电机的两相电压相减得到的,线电压的上下幅值要比相电压范围宽很多,这样采用线电压的方法更加有利于去观测,提高了检测转子位置的准确性。
[0037]
(2)本发明针对传统的无刷直流步电机转子位置估算方法,采用了线电压的无刷直流电机转子位置估算方法,方法简单准确,可操作性强。
附图说明
[0038]
图1为本发明实施例中一种基于线电压的无刷直流电机转子位置估算方法的流程图。
[0039]
图2为本发明实施例中无刷直流电机线电压采集电路。
[0040]
图3为本发明实施例中无刷直流电机的原理图。
[0041]
图4为本发明实施例中一种基于线电压的无刷直流电机转子位置估算方法的线反电动势与相电流波形图。
[0042]
图5为本发明实施例中一种基于线电压的无刷直流电机转子位置估算方法的线反电动势的数字信号图。
[0043]
图6为本发明实施例中一种基于线电压的无刷直流电机转子位置估算方法的系统图。
具体实施方式
[0044]
下面结合说明书附图对本发明的技术方案做进一步的详细说明。
[0045]
本发明提供了一种基于线电压的无刷直流电机转子位置估算的方法,如图1所示,包括如下步骤:
[0046]
步骤s1:获取无刷直流电机的线电压,具体方法如下:如图2所示无刷直流电机线电压采集电路,采用运放的形式,r2、r3、r6、r4并联,再与r1、r8串联;r
10
、r
12
、r
13
、r
11
并联,再与r9、r
14
串联;r
18
、r
19
、r
20
、r
11
并联,再与r
15
、r
21
串联,分别采集无刷直流电机的a、b、c三相中任意两相的电压,可以得到无刷直流电机的线电压u
ac
、u
ba
、u
cb
。
[0047]
步骤s2:获取无刷直流电机的反电动势常数e,求出无刷直流电机的三相反电动势,具体方法如下:获取无刷直流电机的反电动势常数e,可以求出三相反电动势为:
[0048]
ea=e(sinωt k3sin3ωt k5sin5ωt .. knsinnωt)
[0049][0050][0051][0052]
其中,ea、eb、ec是三相定子的反电动势,e是电机的反电动势常数,ω是电机谐振的角频率,k3,k5...kn是反电动势波形中奇次谐波的系数,n是奇数,k是电机的开环增益常数,t是惯性环节时间常数。
[0053]
步骤s3:根据步骤s1的线电压和步骤s2已经求出无刷直流电机的三相反电动势,可以求出无刷直流电机的线反电动势,具体方法为:如图3无刷直流电机的原理图所示,根据步骤s1中采集的永磁同步电机的线电压u
ac
、u
ba
、u
cb
,可以求出线反电动势e
ac
、e
ba
、e
cb
,具体公式为:
[0054][0055][0056][0057]
其中,e
ac
、e
ba
、e
cb
是三相定子的线反电动势,u
ac
、u
ba
、u
cb
是三相定子绕组的线电压,m是三相定子绕组之间的互感,r是三相定子的电阻,l是三相定子的自感,ia、ib、ic是三相定子的相电流。
[0058]
忽略电路中的电感和电阻,可以求出线反电动势e
ac
、e
ba
、e
cb
,具体公式为:
[0059]eac
=u
ac
[0060]eba
=u
ba
[0061]ecb
=u
cb
[0062]
其中,e
ac
、e
ba
、e
cb
是三相定子的线反电动势,u
ac
、u
ba
、u
cb
是三相定子绕组的线电压。
[0063]
忽略高次谐波后,将步骤s2中的三相反电动势进行化简,可得线反电动势为:
[0064]
[0065][0066][0067]
其中,e
ac
、e
ba
、e
cb
是三相定子的线反电动势,e是电机的反电动势常数,ω是电机谐振的角频率。
[0068]
在一个电周期内,线反电动势的过零点分别为反电动势的过零点分别为该组过零点依次滞后于反电动势过零点的电角度,因此与定子电流换相点同相位。
[0069]
如图4所示,方波型无刷直流电机的理想反电势波形为120
°
平顶的梯形波,线反电动势波形为60
°
平顶的梯形波,根据上述推导可以看出,定子三相电流的换相点与线反电动势过零点同相位,所以线反电动势过零点的相位就是电机换相点的相位。
[0070]
步骤s4:将步骤s3求出的线反电动势加上一个符号函数,然后将最终的线反电动势转化为转子位置的数字信号h
ac
、h
ba
、h
cb
,根据线反电动势转化的转子位置数字信号图,可以准确地判断转子所在的位置区间,具体方法如下:根据步骤s3求出的无刷直流电机的线反电动势e
ac
、e
ba
、e
cb
,给求出的线反电动势e
ac
、e
ba
、e
cb
加一个符号函数sgn(x),可以得到表达式为:
[0071][0072][0073][0074]
其中,h
ac
、h
ba
、h
cb
是三相定子的线反电动势转换的数字信号,e是电机的反电动势常数,ω是电机谐振的角频率,sgn(x)是一个符号函数,当x大于0时,符号函数sgn(x)为1,当x小于0时,符号函数sgn(x)为0。
[0075]
根据最终得到的无刷直流电机的线反电动势e
ac
、e
ba
、e
cb
转换的数字信号h
ac
、h
ba
、h
cb
,只需明确符号函数中线反电动势的值大于零还是小于零,就可以知道数字信号的高电平和低电平,从而得到数字信号的上升沿和下降沿。
[0076]
如图5所示无刷直流电机线反电动势的数字信号图,当线反电动势值为正时,相应的数字信号输出高电平,当线反电动势值为负时,相应的数字信号输出低电平。该数字信号的作用与霍尔位置信号相同,在一个周期内,每路信号高低电平分别持续180
°
电角度,三路信号之间相位依次相差120
°
,当任意一路数字信号发生正向跳变或负向跳变时,则表明此时需要进行换相操作,同时,检测其他两路信号的电平,就可准确地判断转子所在的位置区间,完成转子位置检测。
[0077]
如图5所示无刷直流电机线反电动势的数字信号图,当电机正转时,以电机转子位置所处区间ⅰ对应的数字信号101为例,运行60
°
电角度后,线反电动势e
cb
过零点对应的数字信号发生跳变,此时电机转子位置所处区间ⅱ对应的数字信号为100,依次类推可得电机转子位置为101
→
100
→
110
→
010
→
011
→
001,因此线反电动势转换的数字信号图符合六步换
相的控制原理,从而可以准确的检测转子位置。
[0078]
如图6所示,一种基于线电压的无刷直流电机转子估算系统,包括:转速环pi控制器单元51、电流环pi控制器单元52、pwm发生器单元53、换相控制单元54、电流检测单元55、线电压采集单元56、线反电动势估算单元57、过零点检测单元58、转速计算单元59、相位补偿单元60、无刷直流电机61。
[0079]
所述转速环pi控制器单元51分别与电流环pi控制器单元52、电流检测单元55连接,用于将反馈来的实际转速与给定的转速作差,然后经过pi调节,得到期望的参考电流值,再与反馈来的电流值作差,得到一个准确的电流值;所述电流环pi控制器单元52、pwm发生器单元53、换相控制单元54、无刷直流电机单元61依次连接,用于将反馈得到的准确电流值,经过pi控制器调节,从而得到pwm的占空比;所述无刷直流电机单元61、线电压采集单元56、线反电动势估算单元57、过零点检测单元58依次连接,用于计算低通滤波器产生的相位延迟角度,并将其转换为所需延迟的时间,再对线反电动势信号进行延迟,从而得到转子位置的信号;所述转速计算单元59通过相位补偿单元60与换相控制单元54连接,用于补偿转子位置过零点的相位,从而估算出准确的转子位置信号,完成转子位置估算。
[0080]
以上所述仅为本发明的较佳实施方式,本发明的保护范围并不以上述实施方式为限,但凡本领域普通技术人员根据本发明所揭示内容所作的等效修饰或变化,皆应纳入权利要求书中记载的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。
