1.本技术涉及驱鸟器技术领域,特别涉及全天候多方位风光驱鸟器。
背景技术:
2.本部分的陈述仅仅是提供了与本技术相关的背景技术信息,不必然构成在先技术。
3.为应对鸟害引发的线路短路、接地等故障,驱鸟器特别是结构简单、成本较低的风光驱鸟器大规模应用于电网杆塔、线路中,起到了一定效果,但也存在一些问题。比如,因为风力较小、驱鸟器锈蚀等原因造成驱鸟器的转动较慢或难以转动,对风力依赖较大,控制性较差;同时,鸟类的适应性造成驱鸟器规律转动的驱鸟效果也在减弱;再次,反光镜受限于太阳光的反射,在光线较弱的时段无法起到效果。
技术实现要素:
4.本技术为了解决上述问题提出了全天候多方位风光驱鸟器,通过连接臂的摆动加强了驱鸟效果,通过驱动机构减小了对风力的依赖。
5.本技术提供了全天候多方位风光驱鸟器,包括基座,基座顶部垂设有旋转基轴,旋转基轴上旋转套设有安装套环,安装套环侧壁上均匀分布有3个连接臂,连接臂的末端设置有风碗,基座顶部嵌设有驱动机构,旋转基轴连接于驱动机构的输出轴,所述安装套环通过离合机构与旋转基轴活动连接,基座顶部还垂设有顶部为弧形的驱动柱,所述连接臂包括依次连接的连接杆、第一弹条、作用柱、第二弹条、风碗,所述连接杆连接于安装套环侧壁;基座内部嵌设有与驱动机构、离合机构电连接的控制器,连接臂在风力或驱动机构驱动下旋转,作用柱的侧壁与驱动柱的顶部活动抵触,带动连接臂在第一弹条和第二弹跳的作用下摆动。
6.优选地,所述旋转基轴的侧壁上均匀开设有若干个安装槽,所述离合机构包括嵌设于安装槽内的伸缩机构和连接于伸缩机构输出轴的动摩擦片,所述安装套环内壁上环设有与动摩擦片适配的静摩擦片;所述旋转基轴上套设有电滑环。
7.优选地,所述连接杆的末端设置有连接座,所述第一弹条、作用柱、第二弹条、风碗依次连接于所述连接座远离安装套环的一侧底部,所述连接座的顶部设置有水平延伸的上固定杆,所述上固定杆上垂直向下设置有横向约束框、竖向约束框,所述横向约束框、竖向约束框上分别开设有横向滑槽、竖向滑槽,所述第二弹条滑动贯穿所述横向滑槽、竖向滑槽。
8.优选地,所述上固定杆的末端设置有风碗。
9.优选地,所述连接座的顶部垂设有上延伸杆,底部设置有下延伸块,所述上固定杆固接于上延伸杆顶部,所述第一弹条固接于下延伸块远离安装套环一侧。
10.优选地,所述上固定杆上设置有若干爆闪灯。
11.优选地,所述连接杆底部设有与爆闪灯电连接的动电触片,所述基座上设置有与
动电触片适配的触发机构。
12.优选地,所述触发机构包括垂设于基座顶部的竖杆,所述竖杆的顶部设置有升降机构,所述升降机构的输出轴顶部设置有静电触片,所述升降机构的一侧设置有横杆,所述横杆的末端连接于电滑环定子部,所述电滑环转子部与旋转基轴连接。
13.优选地,所述基座顶部设有光纤传感器。
14.优选地,所述基座顶部设有风速计;所述基座上设置有太阳能电池板,基座内部嵌设有太阳能控制器和蓄电池。
15.与现有技术相比,本技术的有益效果为:
16.(1)本技术通过第一弹条、第二弹跳、驱动柱之间的配合,使连接臂摆动,加强了驱鸟的效果。
17.(2)本技术通过上固定杆上的横向约束框、竖向约束框将连接臂的无序摆动转为横向摆动和竖向摆动,避免影响风碗的朝向,减弱风力驱动的效果,同时也加强了驱鸟的可控性;同时,通过在设上固定杆末端也设置风碗,加强了风力驱动的效果。
18.(3)本身请通过爆闪灯、动触片、触发机构的配合,可在光线较弱的情况下加强驱鸟器的光驱效果。
19.(4)本技术通过离合机构和驱动机构的配合,避免了驱鸟器对风力的依赖,在风力较弱的情况下使用驱动机构驱动连接臂旋转,保证了驱鸟效果,在风力较强时,依靠风力驱动连接臂旋转,节约了能源消耗。
附图说明
20.构成本技术的一部分的说明书附图用来提供对本技术的进一步理解,本技术的示意性实施例及其说明用于解释本技术,并不构成对本技术的不当限定。
21.图1是本技术一种实施例的整体结构俯视图,
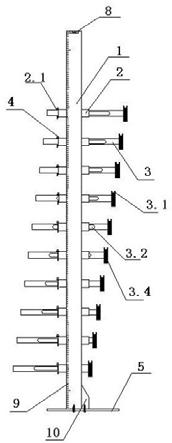
22.图2是本技术一种实施例的整体结构侧视图,
23.图3是本技术一种实施例的局部放大图,
24.图4是本技术一种实施例的局部结构示意图一,
25.图5是本技术一种实施例的局部结构示意图二,
26.图6是本技术一种实施例的旋转基轴局部剖视图。
27.图中:
28.1、基座,2、旋转基轴,3、驱动机构,4、安装套环,5、连接臂,6、驱动柱,7、风速计,8、光纤传感器,9、太阳能电池板,10、电滑环,11、触发机构,12、动触片,13、离合机构,14、静摩擦片,111、升降机构,112、静电触片,113、横杆,114、竖杆,131、动摩擦片,132、伸缩机构,501、连接杆,502、连接座,503、上延伸杆,504、上固定杆,505、爆闪灯,506a、横向约束框,506b、竖向约束框,507、风碗,508、下延伸块,509、第一弹条,510、作用柱,511、第二弹条。
具体实施方式:
29.下面结合附图与实施例对本技术作进一步说明。
30.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本公开的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式
也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
31.在本公开中,术语如“上”、“下”、“左”、“右”、“前”、“后”、“竖直”、“水平”、“侧”、“底”等指示的方位或位置关系为基于附图所示的方位或位置关系,只是为了便于叙述本公开各部件或元件结构关系而确定的关系词,并非特指本公开中任一部件或元件,不能理解为对本公开的限制。
32.如图1至图6所示,本技术提供了全天候多方位风光驱鸟器,包括基座1,基座1顶部垂设有旋转基轴2,旋转基轴2上旋转套设有安装套环4,安装套环4侧壁上均匀分布有3个连接臂5,基座1顶部嵌设有驱动机构3,旋转基轴2连接于驱动机构3的输出轴,所述安装套环4通过离合机构13与旋转基轴2活动连接,基座1顶部还垂设有顶部为弧形的驱动柱6,所述连接臂5包括依次连接的连接杆501、第一弹条509、作用柱510、第二弹条511、风碗507,所述连接杆501连接于安装套环4侧壁,风碗507内设置有反光镜。
33.所述驱动柱6与旋转基轴2的中轴线的水平间距与作用柱510的运动半径相对应,驱动柱6的高度与作用柱510距基座1的垂直距离相对应,驱动柱6顶部为中间高两侧低的弧形。
34.基座1内部嵌设有与驱动机构3、离合机构13电连接的控制器,连接臂5在风力或驱动机构3驱动下旋转,作用柱510运动至驱动柱6的位置时与驱动柱6的弧形部抵触,带动连接臂5在第一弹条509和第二弹条511的作用下摆动,连接臂5循环旋转,周期性地与驱动柱6抵触,摆动效果。
35.具体地,本技术中第一弹条509和第二弹条511为弹簧件,所述驱动柱6的数量为2且绕旋转基轴2中轴线对称设置。
36.所述旋转基轴2的侧壁上均匀开设有若干个安装槽,所述离合机构13包括嵌设于安装槽内的伸缩机构132和连接于伸缩机构132输出轴的动摩擦片131,所述安装套环4内壁上环设有与动摩擦片131适配的静摩擦片14,所述旋转基轴上套设有电滑环10以用于伸缩机构132的供电以及与控制器的通讯。
37.当使用风力驱鸟时,控制器控制伸缩机构132的伸缩轴回缩,带动动摩擦片131与静摩擦片14脱离,连接臂5、安装套环4在风力驱动下旋转驱鸟;当使用驱动机构3作为动力源时,控制器控制伸缩机构132的伸缩轴伸长,带动动摩擦片131与静摩擦片14压持抵接,安装套环4与旋转基轴2固定,驱动机构3带动旋转基轴2旋转,进而带动安装套环4、连接臂5旋转驱鸟。如图4所示,旋转基轴2侧壁开设有环形的限位槽,所述安装套环4旋转套设于限位槽内,所述安装槽开设于限位槽内。
38.所述连接杆501的末端设置有连接座502,所述第一弹条509、作用柱510、第二弹条511、风碗507依次连接于所述连接座502远离安装套环4的一侧底部,所述连接座502的顶部设置有水平延伸的上固定杆504,所述上固定杆504上垂直向下设置有横向约束框506a或竖向约束框506b,所述横向约束框506a、竖向约束框506b上分别开设有横向滑槽或竖向滑槽,所述第二弹条511滑动贯穿所述横向滑槽或竖向滑槽。横向约束框506a、竖向约束框506b用于将连接臂的无序摆动转为横向摆动和竖向摆动,避免影响风碗507的朝向,减弱风力驱动的效果,同时也加强了驱鸟的可控性。具体地,如图5所示,在本实施例中,3个连接臂5中两个设置两个竖向竖向约束框506b,一个设置横向约束框506a。
39.优选地,所述上固定杆504的末端设置有风碗507,加强了风力驱动的效果。
40.所述连接座502的顶部垂设有上延伸杆503,底部设置有下延伸块508,所述上固定杆504固接于上延伸杆503顶部,所述第一弹条509固接于下延伸块508远离安装套环4一侧。所述上延伸杆503和下延伸块508用于扩大第一弹条509、作用柱510、第二弹条511、风碗507的摆动空间。
41.更进一步地,所述上固定杆504上设置有若干爆闪灯505,所述连接杆501底部设有与爆闪灯505电连接的动电触片12,所述基座1上设置有与动电触片12适配的触发机构11。
42.具体地,所述触发机构11包括垂设于基座1顶部的竖杆114,所述竖杆114的顶部设置有升降机构111,所述升降机构111的输出轴顶部设置有与电源连接的静电触片112,所述升降机构111的一侧设置有横杆113,所述横杆113的末端连接于电滑环10定子部,所述电滑环10转子部与旋转基轴2连接。所述动电触片12、静电触片112分别包括两个电触头,静电触片112的两个电触头分别连接电源正负极,动电触片12的两个电触头之间串接爆闪灯505。当需要打开爆闪灯505时,升降机构111带动静电触片112上升至动电触片12的相应高度,连接臂5转动带动动电触片12与静电触片112周期性接触,从而使爆闪灯505闪亮。
43.所述基座1顶部设有光线传感器8,所述基座1顶部设有风速计7,所述光线传感器8、风速计7与控制器电气连接,所述光线传感器8用于检测光照强度,当光照强度低于预设值时,控制器控制触发机构11触发爆闪灯505,当光照强度大于等于预设值时,控制器控制升降机构111的输出轴下降,使触发机构11与动电触片12脱离接触;所述风速计7用于检测风力大小,当风速低于预设值时,控制器控制离合机构13使安装套环4与旋转基轴2固定,使用驱动机构3作为动力源,当风速大于等于预设值时,控制器控制离合机构13使安装套环4与旋转基轴2脱离,使用风力作为动力源。
44.所述基座1上设置有太阳能电池板9,基座1内部嵌设有太阳能控制器和蓄电池。所述太阳能电池板9用于给蓄电池供电续航,所述蓄电池用于本技术各部件的供电。
45.本技术还提供全天候多方位驱鸟方法,其具体步骤如下:
46.s100:控制器根据风速通过离合机构13选择动力源,驱动连接臂5旋转;
47.s200:连接臂5的作用柱510与驱动柱6的弧形部周期性抵触,带动连接臂5在第一弹条509和第二弹条511的作用下摆动;
48.s300:控制器根据光照强度通过触发机构11控制爆闪灯周期性闪亮或熄灭。
49.本实施例中,所述驱动机构3为驱动电机,所述升降机构111、伸缩机构132为微型电缸,所述控制器为单片机。
50.以上仅为本技术的优选实施例而已,并不用于限制本技术,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。
51.上述虽然结合附图对本技术的具体实施方式进行了描述,但并非对本技术保护范围的限制,所属领域技术人员应该明白,在本技术的技术方案的基础上,本领域技术人员不需要付出创造性劳动即可做出的各种修改或变形仍在本技术的保护范围以内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。