28.l/a=α/(4μ’);
29.其中,α为气囊对管道静摩擦力与冲洗水对管道清洗头的推力之间的比值,α《1;
30.根据长径比l/a调整气囊的长度。
31.第二方面,本发明还提供一种管道清洗头清洗调整系统,包括:
32.设置模块,设置管道清洗头的参数;
33.推力获取模块,根据管道清洗头的参数调节冲洗水对清洗头的推力;以及
34.调整模块,调整管道清洗头气囊的长度。
35.第三方面,本发明还提供一种管道清洗头,包括:
36.叶轮驱动机构、气囊和清洗毛刷;
37.所述气囊包裹在所述叶轮驱动机构外;
38.所述叶轮驱动机构与所述清洗毛刷连接;
39.所述清洗毛刷设置在所述气囊外;
40.水流进入叶轮驱动机构带动叶轮驱动机构转动,从而带动清洗毛刷转动,并且水流从叶轮驱动机构中流出使气囊膨胀紧贴管道内壁,从而驱动管道清洗头沿管道移动。
41.本发明的有益效果是,本发明通过设置管道清洗头的参数;根据管道清洗头的参数调节冲洗水对清洗头的推力;以及调整管道清洗头气囊的长度,实现了对管道清洗头气囊长度的调整,便于管道清洗头在管道内部移动,以提高管道清洗头对管道内壁的清洗效果和清洗效率。
42.本发明的其他特征和优点将在随后的说明书中阐述,并且,部分地从说明书中变得显而易见,或者通过实施本发明而了解。
43.为使本发明的上述目的、特征和优点能更明显易懂,下文特举较佳实施例,并配合所附附图,作详细说明如下。
附图说明
44.为了更清楚地说明本发明具体实施方式或现有技术中的技术方案,下面将对具体实施方式或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图是本发明的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
45.图1是本发明中管道清洗头清洗方法的流程图;
46.图2是本发明中管道清洗头清洗调整系统的原理框图;
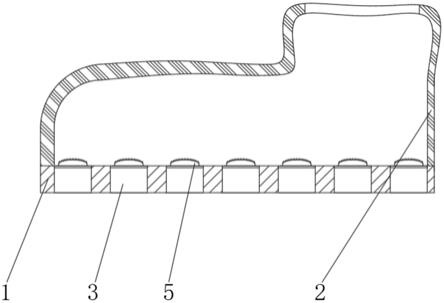
47.图3是本发明中管道清洗头的结构示意图。
48.图中:
49.1为叶轮驱动机构、2为气囊、3为清洗毛刷。
具体实施方式
50.为使本发明实施例的目的、技术方案和优点更加清楚,下面将结合附图对本发明的技术方案进行清楚、完整地描述,显然,所描述的实施例是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
51.实施例1
52.图1是本发明中管道清洗头清洗方法的流程图。
53.如图1所示,本实施例1提供了一种管道清洗头清洗方法,包括:设置管道清洗头的参数;根据管道清洗头的参数调节冲洗水对清洗头的推力;以及调整管道清洗头气囊2(气囊2的材质可以是橡胶等具有弹性的材料)的长度,实现了对管道清洗头气囊2长度的调整,便于管道清洗头在管道内部移动,以提高管道清洗头对管道内壁的清洗效果和清洗效率。
54.在本实施例中,所述设置管道清洗头的参数的方法包括:设置管道内径为amm;管道清洗头中气囊2长度为l mm;气囊2和管道内壁滑动摩擦系数为μ,静摩擦系数为μ’;管道清洗压力为p mpa,则气囊2内压强等于管道冲洗压力b。
55.在本实施例中,所述根据管道清洗头的参数调节冲洗水对清洗头的推力的方法包括:
56.获取气囊2的表面积:s=πx a x l;
57.获取气囊2对管道压力:f1=p x s;
58.获取气囊2对管道滑动摩擦力:fh=f1 xμ=πx a x l x p xμ;
59.获取气囊2对管道静摩擦力:fj=f1 xμ’=πx a x l x p xμ’;
60.获取冲洗水对管道清洗头的推力为:f2=πx(a/2)2x p。
61.在本实施例中,所述根据管道清洗头的参数调节冲洗水对清洗头的推力的方法还包括:使得f2》fj,防止管道清洗头的气囊2与管道内壁发生静摩擦。
62.在本实施例中,所述调整管道清洗头气囊2的长度的方法包括:根据f2与fj的大小关系调整气囊2的长度,即
63.f2 xα=fj;
64.πx(a/2)2x p xα=πx a x l x p xμ’;
65.(a/2)2xα=a x l xμ’;
66.a xα/4=l xμ’67.l/a=α/(4μ’);
68.其中,α为气囊2对管道静摩擦力与冲洗水对管道清洗头的推力之间的比值,α《1;
69.根据长径比l/a调整气囊2的长度;
70.例如,α=0.8,f2 x 0.8=fj;
71.则πx(a/2)2x p x 0.8=πx a x l x p xμ’;
72.(a/2)2x 0.8=a x l xμ’;
73.l/a=1/(5μ’);根据长径比调节气囊2的长度,可以确保在管道清洗头内通过柱塞泵等水泵注入流水时,使得气囊2膨胀紧贴管道内壁,水流可以驱动清洗毛刷3转动以清洗管道内壁,并可以驱动管道清洗头沿管道移动,完成对管道的清洗;在柱塞泵等水泵注入流水流量一定时,调整气囊2的长度可以调节滑动摩擦力和静摩擦力的大小,调节管道清洗头在管道内的移动速度。
74.实施例2
75.图2是本发明中管道清洗头清洗调整系统的原理框图。
76.如图2所示,在实施例1的基础上,本实施例2还提供一种管道清洗头清洗调整系统,包括:设置模块,设置管道清洗头的参数;推力获取模块,根据管道清洗头的参数调节冲
洗水对清洗头的推力;以及调整模块,调整管道清洗头气囊2的长度。
77.在本实施例中,各模块的具体功能在实施例1中已经详细描述,在本实施例中不在赘述。可以将管道清洗头清洗调整系统设置在电脑等智能终端上,以仿真模拟等获得气囊2的长度,便于在实际产品中直接以获取的气囊2的长度进行设置。
78.实施例3
79.图3是本发明中管道清洗头的结构示意图。
80.如图3所示,在实施例1的基础上,本实施例3还提供一种管道清洗头,包括:叶轮驱动机构1、气囊2和清洗毛刷3;所述气囊2包裹在所述叶轮驱动机构1外;所述叶轮驱动机构1与所述清洗毛刷3连接;所述清洗毛刷3设置在所述气囊2外;水流进入叶轮驱动机构1带动叶轮驱动机构1转动,从而带动清洗毛刷3转动,并且水流从叶轮驱动机构1中流出使气囊2膨胀紧贴管道内壁,从而驱动管道清洗头沿管道移动。
81.在本实施例中,气囊2的长度可以通过实施例1中涉及的管道清洗头清洗方法进行设置。
82.综上所述,本发明通过设置管道清洗头的参数;根据管道清洗头的参数调节冲洗水对清洗头的推力;以及调整管道清洗头气囊2的长度,实现了对管道清洗头气囊2长度的调整,便于管道清洗头在管道内部移动,以提高管道清洗头对管道内壁的清洗效果和清洗效率。
83.本技术中选用的各个器件(未说明具体结构的部件)均为通用标准件或本领域技术人员知晓的部件,其结构和原理都为本技术人员均可通过技术手册得知或通过常规实验方法获知。并且,本技术所涉及的软件程序均为现有技术,本技术不涉及对软件程序作出任何改进。
84.在本发明实施例的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本发明中的具体含义。
85.在本发明的描述中,需要说明的是,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
86.在本技术所提供的几个实施例中,应该理解到,所揭露的系统、装置和方法,可以通过其它的方式实现。以上所描述的装置实施例仅仅是示意性的,例如,所述单元的划分,仅仅为一种逻辑功能划分,实际实现时可以有另外的划分方式,又例如,多个单元或组件可以结合或者可以集成到另一个系统,或一些特征可以忽略,或不执行。另一点,所显示或讨论的相互之间的耦合或直接耦合或通信连接可以是通过一些通信接口,装置或单元的间接耦合或通信连接,可以是电性,机械或其它的形式。
87.所述作为分离部件说明的单元可以是或者也可以不是物理上分开的,作为单元显示的部件可以是或者也可以不是物理单元,即可以位于一个地方,或者也可以分布到多个
网络单元上。可以根据实际的需要选择其中的部分或者全部单元来实现本实施例方案的目的。
88.另外,在本发明各个实施例中的各功能单元可以集成在一个处理单元中,也可以是各个单元单独物理存在,也可以两个或两个以上单元集成在一个单元中。
89.以上述依据本发明的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项发明技术思想的范围内,进行多样的变更以及修改。本项发明的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。