1.本实用新型涉及电力检测领域,特别涉及一种用于检测电力接地网使用寿命的探测设备。
背景技术:
2.目前,接地网的维护工作都需要依靠工作人员进行现场操作。如对导体断点和腐蚀状态进行诊断时,需要将探测装置设置在手推车上,操作者推着手推车在整个地面上转一圈,但是容易受到地形限制,探测时间长,操作者劳动量大。而接地网故障时,在一些无人值守的变电站无法以及处理。若能够解决上述问题,不仅能够大大节省人力成本,而且能够更加精准及时的对电力接地系统进行日常监测和维护。
技术实现要素:
3.本实用新型的主要目的在于提供一种用于检测电力接地网使用寿命的探测设备,可以有效解决背景技术中的问题。
4.为实现上述目的,本实用新型采取的技术方案为:
5.一种用于检测电力接地网使用寿命的探测设备,包括接地底板,所述接地底板的顶部设置有固定板,所述固定板的顶部固定连接有变电站,所述接地底板底部的四角分别设置有接地插杆,所述接地底板顶部的四角分别固定连接有固定螺母,所述固定板顶部的四角分别设置有调节手轮,所述变电站内腔的底部设置有固定座,变电站内腔顶部的前后两侧对称固定连接有导向杆,两个所述导向杆的表面对称套接有导向座,所述固定座底部的四周分别设置有支撑杆,所述支撑杆的底部固定连接有转动轴,所述固定座底部的四周分别设置有制动滚轮,所述变电站内腔底部的前后两侧对称开设有行走轨道,所述支撑杆的顶部套接有套筒,所述套筒内腔的顶部设置有滑动板,所述滑动板的顶部固定连接有缓冲弹簧,所述固定座的顶部固定连接有行走机器人,所述行走机器人内腔底部的左侧固定连接有远程通信装置,所述行走机器人内腔的底部固定连接有安装板,所述安装板的顶部固定连接有探测装置,所述行走机器人内腔底部的右侧固定连接有支撑板,所述远程通信装置内腔底部的左侧固定连接有处理器,所述处理器的右侧电连接由反馈模块,所述反馈模块的背端电连接由信号收集模块,所述处理器的左侧固定连接有连接杆,所述连接杆左侧的顶部固定连接有信号发射器,所述行走机器人右侧的前后两侧对称固定连接有移动杆,两个所述移动杆的表面对称套接有复位弹簧,所述支撑板的右侧固定连接有探测头,两个所述移动杆的右侧对称固定连接有防撞挡板。
6.优选的,所述接地插杆的底部贯穿固定板的顶部延伸至固定板的底部,所述接地插杆的底部贯穿接地底板的顶部延伸至接地底板的底部,所述固定螺母的内壁与接地插杆的表面紧密贴合。
7.优选的,所述调节手轮的底部固定连接于接地插杆的顶部,两个所述导向座的内壁与两个导向杆的表面紧密贴合,两个所述导向座的底部固定连接于行走机器人顶部的前
后两侧。
8.优选的,所述转动轴的表面转动连接于制动滚轮的内壁,两个所述行走轨道的内壁与两个制动滚轮的表面紧密贴合,所述套筒的顶部固定连接于固定座底部的四周。
9.优选的,所述滑动板的表面与套筒的内壁紧密贴合,所述滑动板的底部固定连接于支撑杆的顶部,所述缓冲弹簧的顶部固定连接于套筒内腔的顶部。
10.优选的,所述反馈模块的底部固定连接于远程通信装置内腔底部的右侧,所述信号收集模块的底部固定连接于远程通信装置内腔底部的右侧,所述连接杆的左侧贯穿远程通信装置内腔的左侧延伸至远程通信装置的左侧。
11.优选的,所述两个移动杆的左侧贯穿行走机器人的右侧延伸至行走机器人的内腔,两个所述复位弹簧的左侧固定连接于行走机器人右侧的前后两侧,所述探测头的右侧贯穿行走机器人内腔的右侧延伸至行走机器人的右侧,两个所述防撞挡板左侧的顶部和底部固定连接于两个复位弹簧的右侧。
12.有益效果
13.与现有技术相比,本实用新型具有如下有益效果:
14.1、该用于检测电力接地网使用寿命的探测设备,通过设置的接地底板与固定板、接地插杆、固定螺母、调节手轮的配合,可以实现将变电站稳定的固定在固定板的顶部,从而提高变电站的稳固性,可以对变电站内部的装置起到保护作用。
15.2、该用于检测电力接地网使用寿命的探测设备,通过设置的导向杆与导向座、支撑杆、转动轴、制动滚轮、行走轨道的配合,可以实现行走机器人在行走轨道内稳定的移动,从而由行走机器人稳定的进行探测任务,可以对变电站内的接地网进行有效监控。
16.3、该用于检测电力接地网使用寿命的探测设备,通过设置的移动杆与复位弹簧、防撞挡板的配合,可以实现对行走机器人进行防护,防止探测头在探测过程中受到撞击,从而能够更加精准及时的对电力接地系统进行日常监测和维护。
附图说明
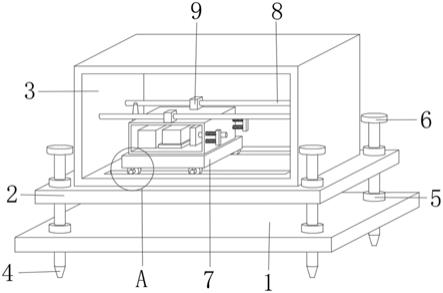
17.图1是本实用新型的剖视图;
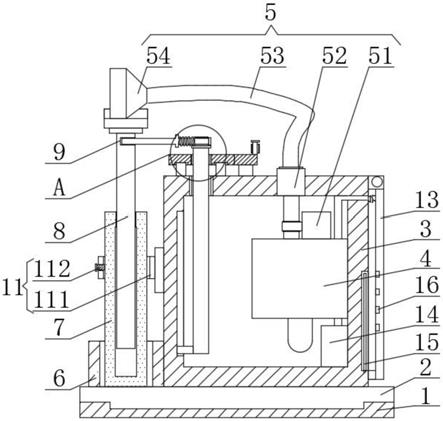
18.图2是本实用新型图1的a处放大图;
19.图3是本实用新型套筒的剖视图;
20.图4是本实用新型行走机器人的剖视图;
21.图5是本实用新型远程通信装置的剖视图;
22.图6是本实用新型图4的b处放大图。
23.图中:1、接地底板;2、固定板;3、变电站;4、接地插杆;5、固定螺母;6、调节手轮;7、固定座;8、导向杆;9、导向座;10、支撑杆;11、转动轴;12、制动滚轮;13、行走轨道;14、套筒;15、滑动板;16、缓冲弹簧;17、行走机器人;18、远程通信装置;19、安装板;20、探测装置;21、支撑板;22、处理器;23、反馈模块;24、信号收集模块;25、连接杆;26、信号发射器;27、移动杆;28、复位弹簧;29、探测头;30、防撞挡板。
具体实施方式
24.为使本实用新型实现的技术手段、创作特征、达成目的与功效易于明白了解,下面
结合具体实施方式,进一步阐述本实用新型。
25.如图1
‑
6所示,一种用于检测电力接地网使用寿命的探测设备,包括接地底板1,接地底板1的顶部设置有固定板2,固定板2的顶部固定连接有变电站3,接地底板1底部的四角分别设置有接地插杆4,接地底板1顶部的四角分别固定连接有固定螺母5,接地插杆4的底部贯穿固定板2的顶部延伸至固定板2的底部,接地插杆4的底部贯穿接地底板1的顶部延伸至接地底板1的底部,固定螺母5的内壁与接地插杆4的表面紧密贴合,固定板2顶部的四角分别设置有调节手轮6,通过设置的接地底板1与固定板2、接地插杆4、固定螺母5、调节手轮6的配合,可以实现将变电站3稳定的固定在固定板2的顶部,从而提高变电站3的稳固性,可以对变电站3内部的装置起到保护作用,变电站3内腔的底部设置有固定座7,变电站3内腔顶部的前后两侧对称固定连接有导向杆8,两个导向杆8的表面对称套接有导向座9,调节手轮6的底部固定连接于接地插杆4的顶部,两个导向座9的内壁与两个导向杆8的表面紧密贴合,两个导向座9的底部固定连接于行走机器人17顶部的前后两侧,固定座7底部的四周分别设置有支撑杆10,支撑杆10的底部固定连接有转动轴11,固定座7底部的四周分别设置有制动滚轮12,变电站3内腔底部的前后两侧对称开设有行走轨道13,通过设置的导向杆8与导向座9、支撑杆10、转动轴11、制动滚轮12、行走轨道13的配合,可以实现行走机器人17在行走轨道13内稳定的移动,从而由行走机器人17稳定的进行探测任务,可以对变电站3内的接地网进行有效监控,支撑杆10的顶部套接有套筒14,转动轴11的表面转动连接于制动滚轮12的内壁,两个行走轨道13的内壁与两个制动滚轮12的表面紧密贴合,套筒14的顶部固定连接于固定座7底部的四周,套筒14内腔的顶部设置有滑动板15,滑动板15的顶部固定连接有缓冲弹簧16,滑动板15的表面与套筒14的内壁紧密贴合,滑动板15的底部固定连接于支撑杆10的顶部,缓冲弹簧16的顶部固定连接于套筒14内腔的顶部,固定座7的顶部固定连接有行走机器人17,行走机器人17内腔底部的左侧固定连接有远程通信装置18,行走机器人17内腔的底部固定连接有安装板19,安装板19的顶部固定连接有探测装置20,行走机器人17内腔底部的右侧固定连接有支撑板21,远程通信装置18内腔底部的左侧固定连接有处理器22,处理器22的右侧电连接由反馈模块23,反馈模块23的背端电连接由信号收集模块24,处理器22的左侧固定连接有连接杆25,反馈模块23的底部固定连接于远程通信装置18内腔底部的右侧,信号收集模块24的底部固定连接于远程通信装置18内腔底部的右侧,连接杆25的左侧贯穿远程通信装置18内腔的左侧延伸至远程通信装置18的左侧,连接杆25左侧的顶部固定连接有信号发射器26,行走机器人17右侧的前后两侧对称固定连接有移动杆27,两个移动杆27的表面对称套接有复位弹簧28,支撑板21的右侧固定连接有探测头29,两个移动杆27的右侧对称固定连接有防撞挡板30,两个移动杆27的左侧贯穿行走机器人17的右侧延伸至行走机器人17的内腔,两个复位弹簧28的左侧固定连接于行走机器人17右侧的前后两侧,探测头29的右侧贯穿行走机器人17内腔的右侧延伸至行走机器人17的右侧,两个防撞挡板30左侧的顶部和底部固定连接于两个复位弹簧28的右侧,通过设置的移动杆27与复位弹簧28、防撞挡板30的配合,可以实现对行走机器人17进行防护,防止探测头29在探测过程中受到撞击,从而能够更加精准及时的对电力接地系统进行日常监测和维护。
26.具体实施例一:通过支撑杆10与套筒14、滑动板15、缓冲弹簧16的配合,可以实现在行走机器人17移动的时候起到缓冲消能的作用,减震效果显著,从而稳定的对电力接地系统进行日常监测。
27.具体实施例二:通过远程通信装置18与处理器22、反馈模块23、信号收集模块24、信号发射器26的配合,可以实现将探测信息通过远程通信装置18传输给后台,后台根据反馈的探测结果对变电站3内的接地网进行有效监控。
28.需要说明的是,本实用新型为一种用于检测电力接地网使用寿命的探测设备,使用时通过转动调节手轮6带动接地插杆4进行转动,通过接地插杆4在固定螺母5的内壁进行调节,从而将接地插杆4拆入地面,从而提高变电站3的稳固性,可以对变电站3内部的装置起到保护作用,再由导向座9在导向杆8的表面进行滑动,从而带动固定座7进行移动,通过制动滚轮12在行走轨道13的内壁进行转动,实现行走机器人17在行走轨道13内稳定的移动,从而由行走机器人17稳定的进行探测任务,可以对变电站3内的接地网进行有效监控,期间,通过滑动板15在套筒14的内腔压缩缓冲弹簧16,可以在行走机器人17移动的时候起到缓冲消能的作用,通过信号收集模块24对探测结果进行收集,再由反馈模块23输送至处理器22内部,由信号发射器26与远程通信装置18的配合,将探测信息通过远程通信装置18传输给后台,后台根据反馈的探测结果对变电站3内的接地网进行有效监控,通过设置的移动杆27与复位弹簧28、防撞挡板30的配合,可以实现对行走机器人17进行防护,防止探测头29在探测过程中受到撞击,从而能够更加精准及时的对电力接地系统进行日常监测和维护。
29.以上显示和描述了本实用新型的基本原理和主要特征和本实用新型的优点。本行业的技术人员应该了解,本实用新型不受上述实施例的限制,上述实施例和说明书中描述的只是说明本实用新型的原理,在不脱离本实用新型精神和范围的前提下,本实用新型还会有各种变化和改进,这些变化和改进都落入要求保护的本实用新型范围内。本实用新型要求保护范围由所附的权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。