1.本实用新型涉及一种能抑制自转的胶囊内窥镜。
背景技术:
2.随着现代医学技术的发展,对于消化腔的病变(例如胃壁上的息肉)可以通过导入胶囊内窥镜来进行检查,通过胶囊内窥镜能够帮助医生获取胃壁上的息肉的图像信息,以辅助医生对患者进行诊断和治疗。这样的胶囊内窥镜通常可以受到磁力作用,医生、护士或其他操作人员通过控制外部磁控装置,对位于消化腔的胶囊内窥镜进行磁控制,以使胶囊型内窥镜移动至消化腔内的预定位置进行检查。
3.胶囊在运动过程中,外部磁控装置所产生的控制磁场作用于胶囊内窥镜,会产生使得胶囊内窥镜绕轴向旋转的分力,该旋转使得胶囊端部的图像获取模块在获取图像过程中出现图像模糊之问题。
技术实现要素:
4.本实用新型是有鉴于上述现有技术的状况而提出的,其目的在于提供一种姿态稳定的能抑制自转的胶囊内窥镜。
5.为此,本实用新型提供了一种能抑制自转的胶囊内窥镜,包括胶囊形外壳、设置在所述胶囊形外壳所形成的内置空间中的图像获取模块以及受外部磁控装置磁控制的第一磁体,所述第一磁体的磁场方向与所述内置空间的长度方向成第一预设角度,使得所述胶囊内窥镜的自转轴线倾斜于所述第一磁体的磁场方向,所述第一预设角度大于0度且小于90度。
6.在本实用新型所涉及的胶囊内窥镜中,胶囊内窥镜内的第一磁体的磁场方向与其内置空间的长度方向不再平行,而是成一定倾斜角度,能够使得胶囊内窥镜在磁控装置的控制磁场中,其自转轴线与控制磁场也成一定的倾斜角度,这样,控制磁场作用于胶囊内窥镜能产生抑制其自转的力,从而能减少自转,使其姿态更加稳定,以提高图像获取质量,同时也能方便操作者准确辨别胶囊内窥镜的当前位置和姿态。胶囊内窥镜内用于感应姿态的传感器也因自转的抑制而提高了传感精度,从而能使位置和姿态数据更加准确。胶囊内窥镜的长度方向相对于控制磁场的倾斜,还能使得图像获取模块所获取的感兴趣组织(volume of interest:voi)的图像区域变大,有利于提高胶囊内窥镜的工作效率。
7.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述第一预设角度为10度到40度中的任意角度。由此能有效抑制胶囊内窥镜的自转。
8.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述图像获取模块具有大于90度且小于180度的视场角δ,所述第一预设角度为(180
‑
δ)/2。第一预设角度在这种设定下,不仅能有效抑制胶囊内窥镜的自转,还能扩大图像获取模块获得voi图像的覆盖角度。
9.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述第一磁体的几何轴线与与所述内置空间的长度方向成第二预设角度。由此通过第一磁体相对于内置空间长度方向
的倾斜和/或内部磁极相对于内置空间长度方向的倾斜实现第一磁体的磁场方向与内置空间的长轴成第一预设角度的倾斜。
10.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述第二预设角度为0度到第一预设角度中的任意角度。由此能够通过第一磁体相对于内置空间长度方向的倾斜和内部磁极相对于内置空间长度方向的倾斜共同实现第一磁体的磁场方向与内置空间长度方向成第一预设角度的倾斜。
11.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述第二预设角度等于第一预设角度。由此能够通过第一磁体相对于内置空间长度方向倾斜第一预设角度实现第一磁体的磁场方向与内置空间长度方向成第一预设角度的倾斜。
12.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述第二预设角度等于0度。由此能够通过第一磁体内部磁极相对于内置空间长度方向的倾斜实现第一磁体的磁场方向与内置空间长度方向成第一预设角度的倾斜。
13.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述图像获取模块具有用于摄像的镜头,所述镜头的视场中心线与所述内置空间的长度方向成第三预设角度。由此能够通过镜头相对于内置空间长度方向的倾斜,进一步扩大图像获取模块所获得的voi的图像区域。
14.另外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述第三预设角度为10度到40度中的任意角度。由此能有效扩大图像获取模块所获得的voi的图像区域。
15.此外,在本实用新型所涉及的胶囊内窥镜中,可选地,所述图像获取模块具有大于90度且小于180度的视场角δ,所述第三预设角度为(180
‑
δ)/2。
16.根据本实用新型提供的胶囊内窥镜,能够有效抑制胶囊内窥镜绕其长度方向的自转,提高获取图像的质量和稳定性,扩大所获取的voi的图像区域。
附图说明
17.现在将仅通过参考附图的例子进一步详细地解释本实用新型,其中:
18.图1是示出了本实用新型的示例所涉及的胶囊内窥镜系统的示意图。
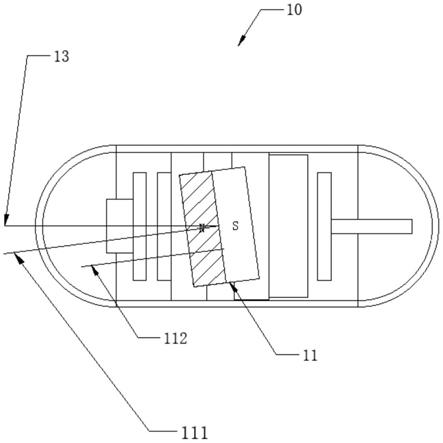
19.图2是示出了本实用新型的一种示例所涉及的胶囊内窥镜的示意图。
20.图3是示出了本实用新型的另一种示例所涉及的胶囊内窥镜的示意图。
21.图4是示出了本实用新型的再一种示例所涉及的胶囊内窥镜的示意图。
22.图5是示出了本实用新型的示例所涉及的胶囊内窥镜在磁控装置的控制磁场中的示意图。
具体实施方式
23.以下,参考附图,详细地说明本实用新型的优选实施方式。在下面的说明中,对于相同的部件赋予相同的符号,省略重复的说明。另外,附图只是示意性的图,部件相互之间的尺寸的比例或者部件的形状等可以与实际的不同。
24.需要说明的是,本实用新型中的术语“包括”和“具有”以及它们的任何变形,例如所包括或所具有的一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可以包括或具有没有清楚地列出的或对于这些过程、方法、产品或
设备固有的其它步骤或单元。
25.另外,在本实用新型的下面描述中涉及的小标题等并不是为了限制本实用新型的内容或范围,其仅仅是作为阅读的提示作用。这样的小标题既不能理解为用于分割文章的内容,也不应将小标题下的内容仅仅限制在小标题的范围内。
26.胶囊内窥镜系统是利用胶囊内窥镜来检查人体消化腔的医疗器械。该系统通过诸如吞服导入人体的胶囊内窥镜,窥探人体肠胃和食道部位的健康状况,帮助医生对患者消化道系统疾患进行诊断。
27.胶囊内窥镜系统一般包括胶囊内窥镜、磁控装置和处理装置。胶囊内窥镜(capsule endoscopy),是一种做成胶囊形状的内窥镜,便于导入人体利用其所具有的摄像装置对内部组织进行检查,检查完毕后排出人体。磁控装置可以利用其所具有的磁体对胶囊内窥镜进行磁场作用,从而驱动胶囊内窥镜按照检查要求在人体内移动,对voi进行图像获取。为了实现上述的驱动,磁控装置需要实时知晓胶囊内窥镜的定位信息。处理装置可处理胶囊内窥镜中传感器传回的信息,包括与位置和姿态有关的传感信息,获得胶囊内窥镜的位置和姿态。
28.在一些示例中,胶囊内窥镜系统的被检体可为动物体,例如人体。胶囊内窥镜可以导入被检体的部位可为诸如消化腔的组织腔体,例如胃部、食道、大肠、结肠、小肠等。另外,在一些示例中,也可以是非消化腔的组织腔体,例如腹腔、胸腔等。对于消化腔例如胃部、食道、大肠等,胶囊内窥镜可以通过吞服而进入消化腔,而对于非消化腔,可以通过临床手术开具微创的开口而将胶囊内窥镜置入非消化腔。以下,以胃腔为例,对胶囊内窥镜系统1进行详细说明。
29.本实用新型的示例所涉及的胶囊内窥镜系统1可以包括胶囊内窥镜10、磁控装置20和处理装置30(参见图1)。在本实施方式中,胶囊内窥镜10可以具有第一磁体11并且可以导入被检体的消化腔(参见图2),磁控装置20可以具有第二磁体21并且可以通过第二磁体21对第一磁体11的磁场作用引导和控制胶囊内窥镜10在被检体的消化腔内进行移动。
30.在一些示例中,胶囊内窥镜10可以是形成为能够导入被检体的且形状如胶囊的医疗器械。从外观上看,胶囊内窥镜10可以呈能够导入到被检体内部的大小的胶囊形壳体14(参见图2),该壳体14可以由筒状壳体和分别位于筒状壳体纵向两端的两个圆顶形状壳体构成。筒状壳体的纵向两端开口被圆顶形状壳体塞住,从而维持液密状态。圆顶形状壳体是透射规定的波长频带的光(例如可见光)的透明的光学圆顶。筒状壳体是大致不透明的壳体。在一些示例中,胶囊型壳体14可以围成一个内置空间,以布置有关探测器件。
31.在一些示例中,如图2所示,胶囊内窥镜10可以包括第一磁体11。第一磁体11可以为永磁体,其可以布置在胶囊内窥镜10内置空间沿长度方向的大致中间位置,由此磁控装置20可通过第二磁体21对第一磁体11的作用更好地控制胶囊内窥镜的位置和姿态。
32.在一些示例中,第一磁体11的磁场方向112可以与其几何轴线111平行,如图2所示,磁场方向112与内置空间的长度方向13成第一预设角度α,0
°
<α<90
°
。几何轴线111与长度方向13成第二预设角度β。在本实施方式中,由于几何轴线111与磁场方向112一致,因此α=β。第一磁体11受磁控装置20中的第二磁体21的磁场作用,其磁场方向112与第二磁体21的磁场方向可以保持一致,而胶囊内窥镜10的自转轴线为其长度方向13,由此使得胶囊内窥镜10的自转轴线倾斜于磁控装置20的磁场方向。在本实施方式中,胶囊内窥镜10的长度
方向13倾斜于第二磁体21的磁场方向。这样,第二磁体21所产生的控制磁场作用于胶囊内窥镜10能产生抑制其绕其自转轴线(长度方向13)自转的力,从而减少自转,使得胶囊内窥镜10的姿态更加稳定,以提高图像获取质量,也可以方便操作者准确辨别胶囊内窥镜10的当前位置和姿态。胶囊内窥镜10内用于感应姿态和位置的传感器也因自转的抑制而提高了传感精度,从而可以使反馈给处理装置30的位置和姿态数据更加准确。
33.在一些示例中,α可以是10度到40度中的任意角度,由此可更加有效地抑制胶囊内窥镜10的自转。
34.在另一些示例中,如图3所示,胶囊内窥镜10可以包括第一磁体11’,第一磁体11’的几何轴线111’与胶囊内窥镜10的长度方向13平行。在本实施方式中,几何轴线111’与长度方向13所成的第二预设角度β=0,第一磁体11’的磁场方向112’与长度方向13成第一预设角度α。第一磁体11’受磁控装置20中的第二磁体21的磁场作用,其磁场方向112’与第二磁体21的磁场方向可以保持一致,而胶囊内窥镜10的自转轴线为其长度方向13,第一预设角度α使得胶囊内窥镜10的自转轴线(长度方向13)倾斜于磁控装置20的磁场方向。具体而言,在本实施方式中,胶囊内窥镜10的长度方向13倾斜于第二磁体21的磁场方向。这样,第二磁体21所产生的控制磁场作用于胶囊内窥镜10能产生抑制其绕其自转轴线(长度方向13)自转的力,从而减少自转,使得胶囊内窥镜10的姿态更加稳定,以提高图像获取质量,也可以方便操作者准确辨别胶囊内窥镜10的当前位置和姿态。胶囊内窥镜10内用于感应姿态和位置的传感器也因自转的抑制而提高了传感精度,从而可以使反馈给处理装置30的位置和姿态数据更加准确。
35.本领域技术人员应该理解,上述实施方式中,β=α或β=0都是示例性的,β可以是0到α之间的任意角度。也就是说,第一磁体11或第一磁体11’的几何轴线可以相对于胶囊内窥镜10的长度方向13倾斜0到α之间的任意角度,只要使得第一磁体11或11’的磁场方向112或112’与胶囊内窥镜10的长度方向13成第一预设角度α。换言之,可以通过第一磁体11或11’相对于胶囊内窥镜10的长度方向13的倾斜和/或内部磁极相对于胶囊内窥镜10的长度方向13的倾斜实现第一磁体11或11’的磁场方向112或112’与胶囊内窥镜10的长度方向13成第一预设角度α。
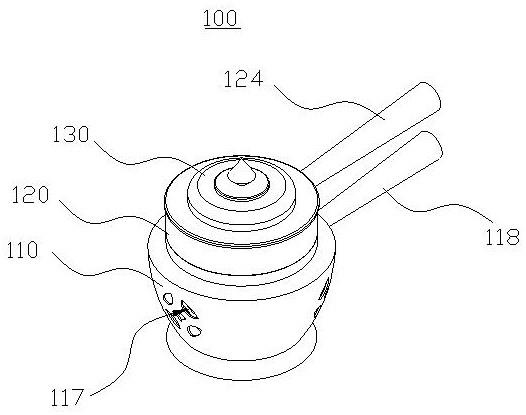
36.在一些示例中,如图4所示,胶囊内窥镜10还可以包括用于在消化腔内进行图像采集的图像获取模块12。图像获取模块12可以布置在胶囊内窥镜10内置空间沿长度方向13的端部,其通过端部透明的圆顶形状壳体拍摄voi图像,并通过电路组件和发射天线(未图示)将voi图像无线传送给相关装置,例如通信装置50(参见图1)。在一些示例中,图像获取模块12具有视场角δ,90
°
<δ<180
°
。
37.在一些示例中,第一预设角度α可为(180
‑
δ)/2。例如,δ为120
°
,则α=30
°
。在这种设定下,不仅可以有效抑制胶囊内窥镜10的自转,还可以扩大图像获取模块12获得voi图像的覆盖角度,有利于提高胶囊内窥镜10的工作效率。
38.在一些示例中,图像获取模块12具有用于摄像的镜头121(如图4所示),其视场中心线122与胶囊内窥镜10的长度方向13成第三预设角度γ,0
°
<γ<90
°
。在一些示例中,第三预设角度γ可以是10度到40度之间的任意角度。在一些示例中,第三预设角度γ可为(180
‑
δ)/2。例如,δ为120
°
,则γ=30
°
由此可以通过镜头121相对于内置空间长度方向13的倾斜,进一步扩大了图像获取模块12所获得的voi的图像区域。
39.在一些示例中,磁控装置20所具有的第二磁体21可为永磁体。图5是示出了本实用新型的示例所涉及的胶囊内窥镜在磁控装置的控制磁场中的示意图。如图5所示,胶囊内窥镜10具有图2所示实施方式的结构。第二磁体21所产生的控制磁场方向22为竖直方向,胶囊内窥镜10的第一磁体11的磁场方向在控制磁场的磁控制下,与控制磁场方向22一致。胶囊内窥镜10的长度方向13与控制磁场方向22形成的夹角为第一预设角度α,由此胶囊内窥镜10绕其长度方向13的自转被抑制。
40.在一些示例中,胶囊内窥镜系统1还可以包括承载被检体的检查床40、与被检体体内的胶囊内窥镜10进行无线通信的通信装置50、操控磁控装置20和检查床40的操作装置60、存储被检体的voi图像等各种信息的存储单元70、以及显示由胶囊内窥镜10所采集到的被检体的voi图像等各种信息的显示装置80。
41.根据本实用新型,可以有效抑制胶囊内窥镜系统中胶囊内窥镜的自转,从而提高获取图像的质量。
42.虽然以上结合附图和示例对本实用新型进行了具体说明,但是可以理解,上述说明不以任何形式限制本实用新型。本领域技术人员在不偏离本实用新型的实质精神和范围的情况下可以根据需要对本实用新型进行变形和变化,这些变形和变化均落入本实用新型的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。