1.本发明涉及一种用于在机动车之间分散地协调行驶操作的方法和操作协调装置。
背景技术:
2.由wo 2017/076593 a1已知一种用于分散地协调至少两个机动车的行驶操作的方法。在该方法中,借助车对车通信将规划和期望轨迹从第一机动车传输到第二机动车。在第二机动车中将第二机动车的行驶轨迹与第一机动车的期望轨迹进行比较。只要第一机动车的期望轨迹与第二机动车的行驶轨迹冲突并且只要总成本函数通过该匹配被优化,则第二机动车的行驶轨迹被匹配成经匹配的行驶轨迹。在此,总成本函数包括第一和第二机动车的至少一个成本函数。
3.由德国专利申请102018002675.3已知一种用于在机动车之间协调行驶操作的方法,该方法基于借助车对车通信在参与的车辆之间相互交换行驶轨迹。操作协调基于单独的成本函数以及优先机动车的成本极限值。
技术实现要素:
4.在此背景下,本发明的任务在于,提供一种替代的在至少两个机动车之间对行驶操作的有效协作协调,其特征在于具有减少的信息范围的相对精细的消息传输。
5.相应地提出一种根据独立权利要求的用于在机动车之间协调行驶操作的方法以及根据并列权利要求的一种操作规划装置、一种计算机程序以及一种计算机程序产品。其他构型是相应从属权利要求的主题。
6.根据本发明的第一方面,该任务通过一种用于在共同的局部周围环境内的机动车之间协调行驶操作的方法来解决,其中,所述机动车中的每一个借助相应机动车的操作规划装置不断地针对意图行驶操作更新至少一个规划行驶轨迹并且在机动车的共同的局部周围环境中借助车对车通信装置传达所述至少一个规划行驶轨迹。每个机动车的操作规划装置经历更新循环,其中,更新循环至少包括以下步骤:
7.a)调用周围环境中相应其它机动车的意图行驶操作的规划行驶轨迹,所述规划行驶轨迹通过车对车通信装置被接收;
8.b)将所接收的规划行驶轨迹与自身的规划行驶轨迹进行比较并且确定在该自身的规划行驶轨迹与该所接收的规划行驶轨迹之间是否存在冲突;
9.c)如果在比较行驶轨迹时确定在自身的规划行驶轨迹与另一机动车的所接收的规划行驶轨迹之一之间存在冲突,则确定优先机动车和非优先机动车,该优先机动车优先实施根据其冲突的规划行驶轨迹的意图行驶操作,该非优先机动车不优先实施根据其冲突的规划行驶轨迹的意图行驶操作;
10.d)通过优先机动车的操作规划装置求取多个潜在的协作轨迹,所述潜在的协作轨迹与非优先机动车的规划行驶轨迹无冲突,其中,以相应于成本函数的成本并且以与优先机动车的成本极限值进行比较的方式评价该潜在的协作轨迹;
11.e)检查在潜在的协作轨迹中是否存在替代的协作轨迹,所述替代的协作轨迹与第三机动车的规划行驶轨迹无冲突,并且所述替代的协作轨迹的成本遵守优先机动车的成本极限值;
12.f)如果存在替代的协作轨迹,则将多个潜在的协作轨迹中成本最有利的协作轨迹作为优先机动车的经更新的规划行驶轨迹来传输。
13.在本发明的意义中,术语“轨迹”可理解为对运动在行程和时间上的数学描述,利用该数学描述尤其可以描述机动车的行驶操作。因此,投影到将来中的轨迹允许根据将来的时刻预测机动车的局部位置。
14.规划行驶轨迹分别描述相应机动车的意图行驶操作,利用该意图行驶操作应尽可能有效地到达最近的中间目的地。然而,尤其当意图行驶操作可能导致与其他机动车的碰撞时,不能总是驶过该规划行驶轨迹。在两个机动车之间即将发生碰撞的情况下,规划行驶轨迹之一与另一机动车的规划行驶轨迹冲突。因此,这两个机动车中的至少一个能够或必须解除即将发生的碰撞并且将其规划行驶轨迹匹配成无冲突的轨迹。
15.为了协调出能够解除这种即将发生的碰撞的行驶操作,机动车的操作规划装置分别与车对车通信装置连接,利用所述车对车通信装置不断地在至少两个机动车之间交换不断更新的行驶轨迹。优选循环地以确定的重复频率、也就是说根据确定的重复时间(英语:repetition time(rt))进行规划行驶轨迹的交换。更新循环可以与传输的重复频率同步。替代地或补充地,也可以实现面向事件的触发。
16.本发明第一方面的构思在于,机动车中的每一个借助车对车通信与共同的局部环境中的其他机动车交换规划行驶轨迹,所述规划行驶轨迹利用所述机动车的操作规划装置来规划并且针对意图行驶操作被不断更新。只要所交换的规划行驶轨迹不相互冲突,就不存在处理需求。每个机动车根据其规划行驶轨迹进行其预期的行驶操作。在此,规划行驶轨迹被划分为时间段,所述时间段的时间长度相应于重复时间。随着行驶轨迹的每次不断更新,第一时间段被转交给行驶调节装置,并且行驶轨迹相应地关于新的时间段被投影到将来。只有两个相互冲突的行驶轨迹和与之相关的两个机动车之间即将发生的碰撞才显示出处理需求。这应该利用根据本发明的方法协作地解除。这样,两个规划行驶轨迹之间的冲突可以视为隐含的协作请求。
17.解除通过投影到将来的规划行驶轨迹之间的冲突所识别出的两个机动车之间即将发生的碰撞首先基于如下构思,即在实施规划的行驶操作时两个机动车中的一个分别相对于另一机动车是优先的。因此,优先机动车可以通过提供协作轨迹对即将发生的碰撞做出反应,而非优先机动车在有疑问的情况下必须以避让轨迹避免即将发生的碰撞。
18.根据本发明的第一方面的操作协调还基于如下构思,即参与多于两个机动车的协作协调始终可以转移到意图行驶操作与相应两个机动车的相应多个并行协作。也就是说,例如三个机动车之间的协作操作协调能够被转移到与非优先机动车和优先机动车的第一协调上并且被转移到又与优先的和非优先机动车的级联的第二协作协调上。在先前的协作操作协调期间优先的相应机动车可能在后续的协调期间在级联的操作协调中处于非优先机动车的角色。
19.根据本发明的操作协调方法的第一方面在多于两个机动车参与的情况下的另一构思是,在第一协调的范围内的协作可取决于或不取决于后续的第二协调的成功协作。因
此,在第一协调的范围内,优先机动车可以不同地协作,其方式是,该优先机动车提供无碰撞的替代协作轨迹或者仅提供以与另一机动车成功的第二协调为前提的成本最有利的协作轨迹。因此,存在不同的协作级别,所述协作级别可以分类为无条件协作、有条件协作或无协作。
20.如果第一协调的优先机动车能够求取用于无条件协作的替代协作轨迹,则通过传输成本最有利的协作轨迹而不是经追加确认的自身的规划行驶轨迹来放弃用于原本意图行驶操作的先行权。因此,优先机动车在这种情况下是无条件协作的,也就是说它至少借助无冲突的替代协作轨迹进行协作,亦即当对于优先机动车而言成本最有利的协作轨迹不是无冲突的时也如此。非优先机动车的操作规划装置可以在跟随在传输之后的更新循环中确定变成无碰撞的自身规划行驶轨迹,从而允许实现意图行驶操作。
21.利用成本函数可以估计每个所求取的潜在协作轨迹的耗费,该耗费相对于优先机动车的规划行驶轨迹产生。在成本函数中例如可以考虑时间需求、能量需求和/或其他因素。原则上,总是寻找具有用于给非优先机动车提供协作的尽可能低的成本的协作轨迹。
22.以下判定基本上取决于优先机动车的成本极限值:判定优先机动车是否提供有利于为与非优先机动车的有条件协作或无条件协作成本最有利的协作轨迹和/或附加的替代协作轨迹。成本函数和成本极限值是优先机动车的单独的判定标准,其对于其它机动车不必是可检验的。
23.根据本发明的方法的特征尤其在于,明确地结束相应的非优先机动车与优先机动车之间的操作协调。如果优先机动车撤回其原本冲突的规划行驶轨迹并且不再以更新的形式传输,则通过优先机动车相关联地且成功地完成协作。
24.根据该方法的一个扩展方案,如果存在替代的协作轨迹,则还可以将该替代的协作轨迹与成本最有利的协作轨迹一起作为优先机动车的一对经更新的规划行驶轨迹来传输。
25.利用关于现存的替代协作轨迹的附加信息,使周围环境中的其它机动车清楚,操作协调的优先机动车将解除与所传输的替代协作轨迹的具体操作冲突。
26.根据该方法的一个扩展方案,如果不存在或不能求取替代的协作轨迹,则可以将成本最有利的协作轨迹与经追加确认的自身行驶轨迹一起作为优先机动车的一对经更新的规划行驶轨迹来传输。
27.通过将协作轨迹与经追加确认的规划行驶轨迹成对地传输,给第一协调的非优先机动车发出信号表示优先机动车等待关于后续的第二协作请求做出判定,并且第一协作请求还可以判定为成功。因此,优先机动车在这种情况下仅是有条件协作的并且通过经追加确认的自身规划行驶轨迹的传输首先为原本意图行驶操作保留先行权。至少只要后续的另外的操作协调尚未被决定,该信息就可以在为了避免碰撞的避让轨迹的规划方面由非优先的第一机动车考虑。
28.第二协作请求也可以取决于后续的第三协作的结果。本方法允许在各两个机动车中的多个级联的协调。
29.根据该方法的一个扩展方案,如果或一旦在冲突检查时确定无冲突,即在成本最有利的协作轨迹与第三机动车的规划行驶轨迹之间没有冲突,则可以将成本最有利的协作轨迹作为经更新的规划行驶轨迹来传输。
30.根据相应的所基于的交通状况和级联的第二操作协调的所缺少的必要性,与非优先机动车即将发生的碰撞可直接地、即随着运行的更新循环的结束由协作的第二机动车终结。
31.根据该方法的一个扩展方案,如果或一旦在成本检查中确定在潜在的协作轨迹中没有一个遵守优先机动车的成本极限值,则通过追加确认来更新优先机动车自身的规划行驶轨迹并且在周围环境中借助车对车通信装置将其作为更新规划行驶轨迹来传输。
32.通过只将借助追加确认来更新的自身规划行驶轨迹传输到另外的机动车上,也就是说在其自身没有提出协作请求的情况下,优先机动车可以直接发出信号表示其是不协作的。
33.为了正确地解释相应的协作水平,该协作水平通过由优先机动车传输的经更新的行驶轨迹的类型和数量间接地用信号表示,非优先机动车的操作规划装置仅需考虑在共同的局部周围环境中的相邻机动车的各个操作规划装置和通信装置的彼此同步的重复循环或更新循环之间的时间偏移。间接用信号表示的协作水平可以在协作请求之后的两个重复循环或更新循环被非优先机动车的操作规划装置识别。
34.根据该方法的一个扩展方案,非优先机动车的操作规划装置、即本身在协调期间被视为非优先机动车的操作协调的操作规划装置能够通过追加确认来更新自身的规划行驶轨迹并且借助车对车通信装置来传输该规划行驶轨迹。
35.因此,非优先机动车可以在每个重复循环或更新循环中首先主动地维持其协作请求。如果通过追加确认来更新的规划行驶轨迹例如由于特殊的交通状况而有条件地是无冲突的,则可能还能够实现意图行驶操作。
36.根据前述方面的一个扩展方案,还可以通过非优先机动车的操作规划装置求取和/或追加确认与优先机动车的所接收的规划行驶轨迹无冲突的避让轨迹。
37.因此确保了,非优先机动车的操作规划装置始终遵守另一机动车的先行权并且可以及时考虑自身的舒适性。
38.因此,根据前述方面的一个扩展方案,如果由操作规划装置确定有触发事件,则非优先机动车的自身的规划行驶轨迹可由避让轨迹代替并且借助车对车通信装置将其作为经更新的规划行驶轨迹来传输。
39.因此,一旦例如所求取的避让轨迹变得比规划行驶轨迹成本更有利,则仅参与第一协作操作协调的非优先机动车可以随时撤回协作请求。作为触发事件可以考虑直至碰撞的时间的极限值。
40.根据该方法的一个扩展方案,如果在比较行驶轨迹时确定在自身的规划行驶轨迹与另一机动车的所接收的规划行驶轨迹之一之间存在冲突,则可以将协调计数器递增。
41.协调计数器例如可以用作触发事件,用于撤回协作请求。此外,协调计数器还可以被考虑用于在进行的操作协调方面监控运行时间(英文:watchdog timer)。
42.根据本发明的另一方面,该任务通过一种用于机动车的操作规划装置来解决,该操作规划装置用于规划和协调与共同的环境中的机动车的行驶操作,该操作规划装置包括用于车对车通信装置的数据接口以及计算单元和用于执行前述方法的程序代码。
43.根据本发明的另一方面,该任务通过一种计算程序解决,当在操作规划装置内的计算单元上实施该计算程序时,指导相应的计算单元实施该方法。
44.根据本发明的另一方面,该任务通过具有用于执行该方法的程序代码的计算机程序产品来解决,该程序代码存储在计算机可读的介质上。
附图说明
45.其它特征和细节由以下说明得出,其中必要时参照附图详细地描述至少一个实施例。所描述的和/或图示的特征本身或者以任意的、有意义的组合形成主体,必要时也可以独立于权利要求,并且尤其是附加地也可以是一个或多个单独申请的主题。相同的、类似的和/或功能相同的部件设有相同的附图标记。
46.图1示出了交通事件的初始状况,该初始状况借助三个机动车之间的协作操作协调来解除。
47.图2总体上示出了协作车辆的自由空间。
48.图3根据具体的初始状况示出了协作的第二机动车的自由空间。
49.图4示出了用于解除两个规划行驶操作之间的第一冲突的两种替代方案。
50.图5示出了用于机动车之间的协作操作协调的流程图。
51.图6根据具体的初始状况示出了协作的第三机动车的自由空间。
52.图7示出了具有无条件协作的第二机动车参与的交通状况的解除。
53.图8示出了用于解除具有有条件协作的第二机动车参与的交通状况的两种替代方案。
54.图9在图中左侧示出了在操作协调失败之后的交通状况,并且在图中右侧示出了三个机动车之间成功的操作协调。
55.图10示出了具有操作协调装置和车对车通信装置的机动车。
具体实施方式
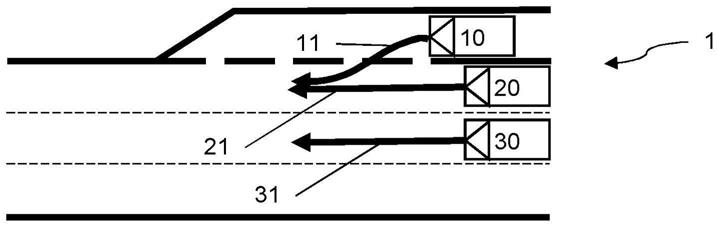
56.在图1中示出了交通状况,根据该交通状况阐述根据本发明的用于协作地协调行驶操作的方法。在具有并入车道的高速入口的局部周围环境1中示出对于一个行驶方向具有三个连贯车道的道路的区段。第一机动车10在该并入车道上行驶,以便借助于随后的行驶操作并入流动交通中的右车道。基于道路走向以及基于当前的位置、速度和运动方向,必须借助第一机动车10的操作规划装置2来规划并入操作。
57.由相应的规划,针对第一机动车10在当前时间点所意图的该行驶操作得出规划行驶轨迹11。该第一规划行驶轨迹11随后在局部周围环境1中借助于车对车通信来传达。
58.根据所示状况,第二机动车20在多车道道路的右车道上行驶。如根据第二规划行驶轨迹21(其通过第二机动车20的操作规划装置2来规划并且借助局部周围环境1中的车对车通信来传达)可以识别出的那样,第二机动车20意图继续跟随其车道、即右车道。第三机动车30在三车道道路的中间车道上行驶并且意图根据所传达的第三规划行驶轨迹31同样继续跟随其车道。
59.用于第一机动车10的意图车道变换或并入操作的规划行驶轨迹11以及用于第二机动车20的意图车道保持操作的规划行驶轨迹21描述了,如果两个行驶操作如所意图的那样实施,则第一机动车10和第二机动车20会在相同的将来时间点到达道路区段的相同局部位置并且因此会相互碰撞。
60.尽管多车道道路的连贯车道上的流动交通原则上相对于并入车道上的车辆具有先行权,但在许多情况下辅助不具有先行权或非优先的机动车并入连贯的右车道是有帮助的。关于在图1中示出的交通状况,这意味着,原则上具有先行权的第二机动车20可以协作地匹配其意图行驶操作21,以便辅助第一机动车10从并入车道归入到连贯的右车道上的流动交通中。
61.图2示出协作车辆50通常具有的自由空间,以便对图2中未示出的其他需要协作的车辆的协作需求或协作请求做出反应。协作车辆50相对于需要协作的车辆被定义为优先车辆并且允许符合交通规则地实施其自身的意图行驶操作。优先车辆50的先行权应由需要协作的车辆相应地注意,因此该需要协作的车辆被定义为非优先车辆。非优先车辆必须与其意图行驶操作无关地始终避免碰撞。在即将发生碰撞时,应在速度和/或路线方面相应地匹配意图行驶操作。优先车辆50可以基于借助规划行驶轨迹51描述的原本意图行驶操作来匹配其速度和/或变换其车道,以便为非优先车辆提供协作。两车辆之间的协作的构思是,优先车辆50可以将其原则上具有先行权的行驶操作有利于非优先车辆地进行匹配,以便解除即将发生的碰撞。如果用于优先车辆50的操作匹配的耗费是相对的,那么该优先车辆将作为协作车辆50提供协作。
62.如在图2中所示,优先车辆50在多车道道路上可以基于其通过规划轨迹51描述的原本意图行驶操作以八个可能的协作轨迹52积极地对其他车辆的协作需求做出反应。协作车辆的自由空间包括a)加速、b)保持速度或c)减速的操作,以及可能与车道变换结合。非协作车辆将其原本规划行驶轨迹51追加确认为经更新的行驶轨迹51’。
63.从图3中可以看出,用于协作车辆50的一般自由空间可能由于具体的交通状况而明显受限。第二机动车20可以通过将所接收的第一机动车10的规划行驶轨迹11与其自身规划行驶轨迹21进行比较来识别即将发生的碰撞。第二机动车20可以在协作机动车的角色中由交通状况决定地提供三个可能的协作轨迹22a、22b和22c,以便解除碰撞。第一协作轨迹22a描述在保持当前车道的情况下的制动操作。第二协作轨迹22b描述在当前速度没有显著改变的情况下从三车道道路的右车道到中间车道的车道变换操作。但是,仅当第三机动车30在协作时辅助第二机动车20时,第二协作轨迹22b才被考虑用于与第一机动车10协作,因为规划行驶轨迹31和第二协作轨迹22b会导致在第二机动车20与第三机动车30之间发生碰撞的行驶操作。
64.第三协作轨迹22c描述组合的制动和车道变换操作。
65.如从下面的说明中还可以看出的那样,道路交通中的有多于两个车辆参与的协作操作总是可以归结于道路交通中与各两个车辆的多个并行协作,也就是说,归结于各一个优先车辆与一个非优先车辆之间的协作。
66.每个规划行驶轨迹11、21和31必须相应于运动的机动车在时间进程期间的持续的位置变化不断地被更新并且借助于车对车通信装置3相应地在周围环境1中重新被传达。有效的或经更新的规划行驶轨迹由机动车10、20或30的车对车通信装置3循环地、即优选地周期性地在确定的重复时间上发送和接收。重复时间可以包括例如100ms。
67.更新循环(在该更新循环期间通过相应的操作规划装置2更新规划行驶轨迹)可以与配属的车对车通信装置3的重复循环同步并且以100ms的周期或10hz的重复频率进行。更新循环和重复循环不一定必须是同步的。替代地和/或附加地,也可以基于事件地触发(英
语:event triggered)对规划行驶轨迹的更新和传输。
68.在图5中示出了具有用于更新循环的步骤序列的流程图,每个机动车的操作规划装置2为了更新自身的规划行驶轨迹经历所述更新循环,并且所述更新循环能够协作地协调其他机动车的所接收的规划行驶轨迹。协作操作协调可能需要多于一个的更新循环,从而所示的步骤序列必要时可以多次实施,直到在两个或更多个机动车之间解除在意图行驶操作方面的冲突。
69.协作操作协调的工作方式基于在图1中示出的交通状况以及根据在图5中示出的流程图来阐述。
70.在图1中示出的三个机动车10、20和30通过车对车通信分别传输当前的规划行驶轨迹11、21和31,利用这些行驶轨迹分别描述相应机动车的意图行驶操作。相应其它机动车的所规划的和所传达的行驶轨迹作为消息由每个机动车的车对车通信装置3捕获。在第一步骤100中,由机动车10、20和30的相应操作规划装置2从所配属的车对车通信装置3的接收缓存器中调用当前接收的规划行驶轨迹。
71.在接下来的比较步骤200中,将相应其它机动车的所接收的规划行驶轨迹分别与自身的规划行驶轨迹进行比较,其中,分别检查自身的规划行驶轨迹是否与所接收的规划行驶轨迹无冲突。与规划行驶轨迹无冲突意味着,相应的意图行驶操作不会导致所属的机动车的碰撞。因此,根据在图1中示出的交通状况,第三机动车30接收规划行驶轨迹11和21,将这些规划行驶轨迹分别与自身的规划行驶轨迹31比较。在比较步骤200中,第三机动车30的操作规划单元2确定自身的规划行驶轨迹31不与另外两个所接收的规划行驶轨迹11和21中的任何一个冲突。因此,通过第三机动车30的操作规划装置2确定第三机动车30首先不参与行驶操作的与另一机动车的协作协调。因此,基于在紧接在前的更新循环中规划的有效规划行驶轨迹31能够在步骤250中通过追加确认来更新自身的规划行驶轨迹31。经更新的规划行驶轨迹31最后在步骤710中借助车对车通信传达给周围环境1的所有其他机动车。
72.第一机动车10和第二机动车20借助于它们的操作规划装置2在步骤200中分别确定自身的规划行驶轨迹11或21与由相应其他机动车接收的行驶轨迹21或11冲突。因此,两个机动车10和20确定有协作需求。
73.第一和第二机动车10和20的操作规划装置2在步骤300中分别执行对交通状况的分析,所述分析例如可以借助基于地图和传感器的周围环境分析来进行,从而结合适用的先行规则来分别确定两个机动车中的哪一个为了实施其相应于规划行驶轨迹的意图操作是优先的或不是优先的。相应于适用的交通规则,仅当排除了对其他交通参与者的危险时,才允许变换车道。基于该规则和状况分析,并行地分别由两个操作规划装置2识别出,第一机动车10是非优先机动车并且第二机动车20是优先机动车。与第二规划行驶轨迹21冲突的第一规划行驶轨迹11被两个操作规划装置2评价为非优先的第一机动车10对优先的第二机动车20的协作请求。
74.随着识别出协作需求,开始第一机动车10与第二机动车20之间的协作操作协调,所述协作操作协调可以在多个更新循环上、也就是说在多个例如100ms的时间间隔上延伸。在步骤300中可以设置,将协作计数器递增一个计数步骤,该协作计数器还可以用于控制协作操作协调。先前被初始化的协作计数器在第一更新循环中在识别到协作需求之后被激活,其方式是,例如将该协作计数器从“零”增加到值“一”。
75.因此,非优先的第一机动车10可以在步骤350中基于在紧接在前的更新循环中被规划的、当前有效的规划行驶轨迹11通过追加确认来更新其自身的规划行驶轨迹、即第一规划行驶轨迹11。通过追加确认被更新的第一规划行驶轨迹11还与接收到的优先的第二机动车20的当前有效的第二规划行驶轨迹21冲突。通过在步骤730中随后传输经更新的第一规划行驶轨迹11,第一机动车10发出信号表示其(至少对于下一更新循环而言)继续意图并入到三车道道路的右车道上。继续存在冲突的、经更新的第一规划行驶轨迹11可以并且应该继续解释为维持第一机动车10的协作请求。
76.非优先的第一机动车10必须在其意图行驶操作与优先机动车20的协调期间始终避免碰撞。为此,可以由非优先的第一机动车10的操作规划装置2在步骤350期间规划避让轨迹12。如果第一规划行驶轨迹11与第二规划行驶轨迹21之间的冲突未或未及时利用优先的第二机动车20的提供协作来解除,则可以另选这种用于无碰撞的行驶操作的避让轨迹12。
77.优先的第二机动车20的操作规划装置2在步骤400中求取多个潜在的协作轨迹,所述潜在的协作轨迹与非优先机动车10的第一规划行驶轨迹11无碰撞。如已经结合图3所述,在本示例中由交通状况决定地针对优先的第一机动车10考虑第一潜在的协作轨迹22a和替代地考虑第二和第三潜在的协作轨迹22b和22c,以便协作地解除识别出的冲突。潜在的协作轨迹相对于第二规划行驶轨迹分别以相应于优先机动车20的成本函数的成本进行评价。利用成本函数可以估计每个所求取的潜在的协作轨迹22a、22b和22c相对于优先机动车20的规划行驶轨迹21的耗费。例如时间需求、能量需求和/或其它因素可以包括到成本函数中。
78.在图3示出的潜在的协作轨迹22a、22b和22c中可以假设,根据第一协作轨迹22a的第一潜在协作操作的耗费是相对高的,因为优先的第二机动车20必须通过制动操作投资时间和动能用于与非优先的第一机动车10协作。第二潜在的协作轨迹22b对于优先机动车20而言不太耗费,因为车道变换仅会付出相对小的舒适性限制的代价。第三潜在的协作轨迹22c显然是最耗费的替代方案,因为在此用于相应制动操作的成本与舒适性限制叠加。
79.结合步骤500,从三个潜在的协作轨迹中将第二潜在的协作轨迹22b视为成本最有利的替代方案。将用于第二潜在的协作轨迹22b的成本与优先的第二机动车20的成本极限值进行比较。如果在步骤500中确定遵守了最佳协作极限值,则第二协作轨迹22b被求取或选择为成本最有利的协作轨迹。
80.相反,如果确定了未遵守成本极限值,则针对优先的第二机动车20不考虑与非优先的第一机动车10的协作。在这种情况下,在步骤720中通过追加确认来更新第二规划行驶轨迹21并且随后在周围环境1中进行传达。
81.如果在步骤500中求取出成本最有利的协作轨迹,则随后在步骤600中检查所选择的又成本最有利的协作轨迹22b是否与周围环境1的第三机动车的所接收的规划行驶轨迹之一冲突。
82.图3示出,通过第二协作轨迹22b和通过第三规划行驶轨迹31描述的两个意图行驶操作可能或会导致第二机动车20与第三机动车30之间的碰撞。优先的第二机动车20的操作规划装置2因此确定成本最有利的协作轨迹22b与第三机动车30的规划行驶轨迹31之间有冲突。
83.由于在步骤600中确定的操作冲突,在步骤700中检查多个在步骤400中求取的潜在的协作轨迹中是否存在这样的替代的协作轨迹,该替代的协作轨迹与第三机动车30的规划行驶轨迹31无冲突并且其成本遵守优先的机动车20的成本极限值。
84.如果不存在或不能求取累积地满足所述条件中的两个条件的替代协作轨迹,则在步骤800中借助车对车通信装置3将成本最有利的协作轨迹22b与经追加确认的自身的规划行驶轨迹21一起作为的优先车辆20的一对经更新的规划行驶轨迹在共同的周围环境1中传达。
85.如果相反地找到了这样的替代协作轨迹,其不仅遵守第二机动车20的成本极限值,而且与第三机动车30的规划行驶轨迹31无冲突,则在步骤810中至少将成本最有利的协作轨迹22b作为第二机动车20的经更新的规划行驶轨迹在共同的周围环境1中传输。根据当前的示例状况,第二最有利的协作轨迹22a被视为为第二机动车20的替代的协作轨迹。
86.在传输时,在步骤810中可选地将所求取的第二最有利的协作轨迹22a与成本最有利的协作轨迹22b一起作为优先机动车20的一对经更新的规划行驶轨迹在共同的周围环境1中传达。
87.图4示出在如下时间点的由图1已知的交通状况的更新的图示的两种替代方案,在该时间点之后所有三个机动车10、20和30的规划行驶轨迹借助操作规划装置2被更新并且借助车对车通信装置重新在共同的周围环境1中传达。机动车在持续100ms的重复时间期间相对于在图1中示出的局部位置沿行驶方向在多车道道路上前进。在行驶速度例如为90km/h时,驶过大约2.5m。因此,追加确认了意图行驶操作的以一重复时间间隔到将来的投影的时间水平。
88.如在左边的图4a所示,成本最有利的协作轨迹22b与第二最有利的协作轨迹22a一起作为优先机动车20的一对经更新的规划行驶轨迹在周围环境1中传输。
89.图4b示出了当不能找到合适的替代协作轨迹时的状况。因此,根据步骤800,将经追加确认的规划行驶轨迹21与成本最有利的第二协作轨迹22b一起作为优先机动车20的一对经更新的规划行驶轨迹在周围环境1中传输。
90.由图4的两幅图可见,用于第二机动车20的成本最有利的、即优选的协作行驶操作的第二协作轨迹22b在没有第三机动车30的主动辅助的情况下不可实现。第二机动车20相对于第三机动车30不优先根据第二协作轨迹22b执行车道变换操作。因此,对于车道变换,需要在现在非优先的第二机动车20和优先的第三机动车30之间的第二协作操作协调。
91.当前所描述的操作协调的构思是,潜在的协作方、即在本示例中的第二机动车20相对于需要协作的情况、即在当前情况下的第一机动车10可以不同地协作。因此,存在不同的协作级别,其可以分类为无条件协作、有条件协作或无协作。
92.图4的左图a)示出了无条件协作的第二机动车20,其将会使第一机动车10能够在所有情况下进行预期的并入操作。相反,图4的右图b)示出有条件协作的第二机动车20,其仅在以下条件下提供协作:第三机动车30以协作助手的特性在根据成本最有利的协作轨迹22b的期望车道变换时辅助第二机动车20。
93.协作等级可以分别根据成本函数结合潜在协作方的成本极限值单独地控制。
94.第二机动车20的第二协作轨迹22b在根据图4a的无条件协作的情况下也是协作操作,即第二机动车20优选用于与第一机动车10协作操作协调。通过传输与第三规划行驶轨
迹31冲突的第二协作轨迹22b,隐含地向第三机动车30提出协作请求。
95.图6示出,如果第三机动车30根据成本准备好与第二机动车20协作,原则上该第三机动车可以提供三个潜在的协作轨迹32a、32b和32c。在没有制动操作的情况下从中间车道到左车道的车道变换对于第三机动车30而言是以最小的耗费进行的协作操作。相应的轨迹可以被选择为用于操作协作的成本最有利的协作轨迹32b。
96.在所有三个机动车10、20和30的操作规划装置2经历根据图5的前述更新循环并且以相互交换经更新的规划行驶轨迹来结束该更新循环之后,可以开始新的更新循环。
97.如果第二机动车20是无条件协作的,如图4a所示,则在步骤200中通过第一机动车10的操作规划装置2确定自身的规划行驶轨迹11与任何其它所接收的行驶轨迹没有冲突。在步骤250中通过追加确认来更新自身的规划行驶轨迹11。第一机动车10与第二机动车20之间的协作可以被认为是成功的,并且因此被视为结束。第一机动车10可以实施其意图并入操作。前述更新循环中的持续的协作计数器被重置并且可以舍弃可能被提供的避让轨迹。在步骤710中传输更新的自身行驶轨迹11。
98.在相对于第一机动车10无条件协作的第二机动车20的情况下,仅还需要协调第二机动车20与第三机动车30之间的协作。在图5中示出的针对一个更新循环的序列的步骤300中,分别通过第二和第三机动车20和30的两个操作规划装置2确定第二机动车20是非优先机动车并且第三机动车30是优先机动车。在步骤400至500中,优先的第三机动车30的操作规划装置确定成本最有利的协作轨迹32b,该协作轨迹与在共同的周围环境1内的其它规划行驶轨迹不冲突。
99.如果所求取的成本最有利的协作轨迹32b超过了优先的第三机动车30的单独的成本极限值,则在步骤720中追加确认第三机动车30的自身的规划行驶轨迹31并且将其作为经更新的规划行驶轨迹31在共同的周围环境1中传达。因此没有为第二机动车20提供协作。第二机动车20例如可以通过协作计数器控制地在多个随后的更新循环中维持其协作请求。
100.在相对于第一机动车10无条件协作的第二机动车20和相对于第二机动车20不协作的第三机动车30的情况下解除交通状况,如在图7a中所示。
101.如果第三机动车30也是与第二机动车20协作的,也就是说,如果成本最有利的协作轨迹32b的成本遵守第三机动车30的成本极限值,则在步骤600中由第三机动车30的操作规划装置2确定成本最有利的协作轨迹32b与另外的机动车的所接收的规划行驶轨迹不冲突。因此,在步骤820中,借助车对车通信将成本最有利的协作轨迹32b作为经更新的规划行驶轨迹传输。如图7b所示,在成功的操作协调之后解除交通状况。
102.如果第二机动车20仅是有条件协作的,如在图4b中所示,则在步骤200中通过第一机动车10的操作规划装置2还确定在自身的和所接收的规划行驶轨迹11和21之间有冲突。在步骤300中,将协作计数器递增并且确定第一机动车10相对于第二机动车10是不优先的。如果还不满足中断标准、例如直至碰撞的时间(英语:time to collision,ttc)的极限值,则自身的规划行驶轨迹11可以在步骤350中被追加确认并且作为经更新的规划行驶轨迹11来传输。
103.如前所述,第三机动车30借助其操作规划装置2首先确定自身的规划行驶轨迹31与由第二机动车20作为规划行驶轨迹传输的成本最有利的协作轨迹22b之间有冲突并且可以与成本相关地在步骤820中提供协作轨迹32b或者在步骤720中追加确认其自身的规划行
驶轨迹并且拒绝协作。
104.第二机动车20在第二更新循环中主要更新其自身的规划行驶轨迹21以及其成本最有利的协作轨迹22b。在第二更新循环的步骤300和600中还确定不仅自身的规划行驶轨迹21而且成本最有利的协作轨迹22b分别与其他机动车之一的规划行驶轨迹有冲突。相应地,在步骤800中,新求取的成本最有利的协作轨迹22b与经追加确认的自身的规划行驶轨迹21一起作为优先机动车20的一对经更新的规划行驶轨迹来传输。
105.只要第三机动车30不是协作的并且如图8a所示需要在共同的周围环境中传达经更新的自身的规划行驶轨迹31,则相对于第一机动车有条件协作的、但优先的第二机动车20将保持其自身的规划行驶轨迹21以及周期性地进行更新和传输。
106.三个机动车10、20和30之间的协作也可以在不成功的情况下结束,其方式是,第一机动车的操作规划装置2将所提供的避让轨迹12选择或必须选择为更新的规划行驶轨迹。在随后的更新循环中,第二机动车20将确定其自身的规划行驶轨迹和所接收的规划行驶轨迹之间不再有冲突。无冲突的自身的规划行驶轨迹21根据步骤250被追加确认并且在步骤710中作为经更新的规划行驶轨迹在共同的周围环境中传达。一个或多个协作计数器可以在步骤350中被重置,所述协作计数器用于控制第一机动车10与第二机动车20之间以及第二机动车20与第三机动车30之间的协作操作协调。图9a示出了在不成功的操作协调之后的示例性的交通状况。
107.如果第三机动车30相对于第二机动车20是协作的,其方式是,通过第三机动车30将成本最有利的协作轨迹32b作为经更新的规划行驶轨迹传输,则第二机动车20的操作规划装置2在随后的更新循环的步骤600中确定当前在更新循环中所求取的成本最有利的协作轨迹22b是无冲突的。因此,在步骤820中,无冲突的协作轨迹22b可以作为经更新的自身的规划行驶轨迹通过所配属的车对车通信装置3来传输。
108.在另一随后的更新循环中,第一机动车10可以确定无冲突的自身的规划行驶轨迹11。图9b示出在三个机动车之间成功的操作协调之后的示例性交通状况。
109.在图10中示出了机动车1,其包括操作规划装置2和所配属的车对车通信装置3。操作规划装置2可以从车对车通信装置3的缓存器调用所接收的带有当前规划行驶轨迹的消息或者通过该车对车通信装置来传达、即发送自身的当前规划行驶轨迹。替代地,可以将所接收的消息主动转发到操作规划装置2。
110.尽管通过实施例详细示出和阐述了主题,但是本发明不受所公开的示例的限制并且本领域专业技术人员可以从中导出其他变型。因此清楚的是,存在大量变型可能性。同样清楚的是,示例性地提到的实施方式仅示出了示例,所述示例不以任何方式理解为例如对本发明的保护范围、应用可能性或配置的限制。相反,上述说明和附图说明使得本领域技术人员能够具体实现示例性的实施方式,其中,本领域技术人员在了解所公开的发明构思的情况下,例如可以在各个在示例性的实施方式中提到的元件的功能或布置方面进行各种变化,而不偏离保护范围,该保护范围通过权利要求及其法律上的等同方案、例如说明书中的进一步阐述来限定。
111.附图标记列表
[0112]2ꢀꢀꢀ
操作规划装置
[0113]3ꢀꢀꢀ
车对车通信装置
[0114]
10
ꢀꢀ
第一机动车
[0115]
11
ꢀꢀ
规划行驶轨迹
[0116]
20
ꢀꢀ
第二机动车
[0117]
21
ꢀꢀ
规划行驶轨迹
[0118]
30
ꢀꢀ
第三机动车
[0119]
31
ꢀꢀ
规划行驶轨迹
[0120]
100 调用所接收的规划行驶轨迹
[0121]
200 比较规划行驶轨迹
[0122]
250 追加确认自身的规划行驶轨迹
[0123]
300 求取优先的和非优先的机动车
[0124]
350 追加确认自身的规划行驶轨迹和提供避让轨迹
[0125]
400 求取和评价潜在的协作轨迹
[0126]
500 在成本极限值内求取成本最有利的协作轨迹
[0127]
600 对成本最有利的协作轨迹的冲突检查
[0128]
700 在成本极限值内求取无冲突的替代协作轨迹
[0129]
710 传输经追加确认的自身规划行驶轨迹
[0130]
720 传输经追加确认的自身规划行驶轨迹
[0131]
730 传输经追加确认的自身规划行驶轨迹或所提供的避让轨迹
[0132]
800 传输成本最有利的协作轨迹和经追加确认的自身规划行驶轨迹
[0133]
810 传输成本最有利的协作轨迹和替代的协作轨迹
[0134]
820 传输经追加确认的自身的规划行驶轨迹
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。