1.本发明涉及一种智慧交通技术领域,是一种动态电子围栏的形成方法、装置及车辆运行控制方法。
背景技术:
2.电子围栏是一种虚拟化的围栏,是结合导航定位系统进行区域划分以及越界警告的系统。例如,对爆破区域进行电子围栏设定,能够识别并预警进入爆破区域的作业人员,对于作业关键时期非必要人员的闯入进行预警,同时可以结合手持定位终端实现爆破前车辆、人员的清场;对安全运输区域进行电子围栏设定,主要对安全运输路线的边缘以及运输方向的分界线进行设定,防止车辆在运输道路上随意行驶及超车,造成不必要的损失;对矿渣填埋场进行电子围栏设定,主要针对进入不断推进的填埋场的作业车辆进行分界线电子围栏设定,既能够保证车辆不掉下填埋层,又能保证车辆倾倒的矿渣不在填埋层上堆积。而现有电子围栏在应用于矿山排土场作业车辆行驶控制时,电子围栏边界不能动态更新,存在警示不及时、不准确的问题。
技术实现要素:
3.本发明提供了一种动态电子围栏的形成方法、装置及车辆运行控制方法,克服了上述现有技术之不足,其能有效解决现有使用固定电子围栏对排土场作业车辆进行运行控制时存在的电子围栏边界不能动态更新,造成警示不及时、不准确的问题。
4.本发明的技术方案之一是通过以下措施来实现的:一种动态电子围栏的形成方法,包括:
5.模拟仿真作业车辆的整车外形平面结构,构建车辆电子模型;
6.模拟仿真排土场平面形态,构建排土场电子模型;
7.结合行驶作业车辆的位置信息和车辆电子模型,搜索、绘制落入排土场电子模型的车辆位置信息,形成轨迹画布;
8.利用主动轮廓线模型分割算法,根据车辆电子模型和不断变化的轨迹画布生成动态电子围栏。
9.下面是对上述发明技术方案的进一步优化或/和改进:
10.上述结合历史行驶作业车辆的位置信息和车辆电子模型,搜索、绘制落入排土场电子模型的车辆位置信息,形成轨迹画布,包括:
11.采集行驶作业车辆的位置信息,位置信息包括车辆id、经度、纬度、海拔高度;
12.排土场电子模型获取行驶作业车辆的位置信息中的海拔高度信息,匹配与之最接近的排土场电子模型;
13.获取行驶作业车辆的最新位置信息,在匹配到的排土场电子模型上描绘该位置信息,形成轨迹画布。
14.上述利用主动轮廓线模型分割算法,根据车辆电子模型和不断变化的轨迹画布生
成动态电子围栏,包括:
15.获取多个轨迹画布;
16.将车辆电子模型作为主动轮廓线模型的输入,获得由多个轨迹点形成的区域轮廓线,初步划定的电子围栏界限;
17.根据行驶作业车辆的位置信息的变化,轨迹画布不断变化,重复上述过程,更新电子围栏界限,形成动态电子围栏。
18.上述模拟仿真排土场平面形态,构建排土场电子模型,包括:
19.采集排土场第一信息,其中,排土场第一信息包括排土场四个角的位置信息、排土场第一层所处的海拔高度;
20.根据排土场信息,建立n*n的矩阵,模拟排土场平面结构,作为排土场电子模型的第一层;
21.采集排土场第二信息,其中,排土场第二信息包括排土场层高差、层间距;
22.根据排土场第二信息建立排土场电子模型的其余层。
23.上述模拟仿真作业车辆的整车外形平面结构,构建车辆电子模型,包括:
24.采集作业车辆的车辆信息,其中,作业车辆的车辆信息包括车长、车宽、高精度定位仪定位点;
25.根据作业车辆的车辆信息,建立3*3矩阵,获得作业车辆平面结构,确定车辆电子模型。
26.发明的技术方案之二是通过以下措施来实现的:一种动态电子围栏的形成装置,包括:
27.第一模型构建单元,模拟仿真作业车辆的整车外形平面结构,构建车辆电子模型;
28.第二模型构建单元,模拟仿真排土场平面形态,构建排土场电子模型;
29.轨迹画布绘制单元,结合行驶作业车辆的位置信息和车辆电子模型,搜索、绘制落入排土场电子模型的车辆位置信息,形成轨迹画布;
30.电子围栏生成及更新单元,利用主动轮廓线模型分割算法,根据车辆电子模型和不断变化的轨迹画布生成动态电子围栏。
31.发明的技术方案之三是通过以下措施来实现的:一种车辆运行控制方法,包括:
32.根据动态电子围栏的形成方法生成动态电子围栏;
33.将动态电子围栏描绘显示在地图上;
34.在电子地图上显示作业车辆的位置信息,将作业车辆的位置信息到动态电子围栏的距离,并设定对应的安全距离信息,根据安全距离信息对作业车辆发出安全示警信息。
35.本发明构建车辆电子模型和排土场电子模型,结合行驶作业车辆的位置信息及利用主动轮廓线模型分割算法完成动态电子围栏的建立,通过动态电子围栏实时且准确识别出安全排土区与示警区,对不断推进排土场的作业车辆进行实时动态安全排土区设定,向驾驶员提供安全报警辅助信息,既保证了作业车辆不掉下填埋层,又保证了作业车辆倾倒的矿渣不在填埋层上堆积,有效降低了事故率,提高了安全生产效率。
附图说明
36.附图1为本发明实施例1的方法流程图。
37.附图2为本发明实施例2中的一种车辆电子模型示意图。
38.附图3为本发明实施例2中构建排土场电子模型的方法流程图。
39.附图4为本发明实施例2中形成轨迹画布的方法流程图。
40.附图5为本发明实施例2中生成动态电子围栏的方法流程图。
41.附图6为本发明实施例3的装置结构图。
42.附图7为本发明实施例4的方法流程图。
具体实施方式
43.本发明不受下述实施例的限制,可根据本发明的技术方案与实际情况来确定具体的实施方式。
44.下面结合实施例及附图对本发明作进一步描述:
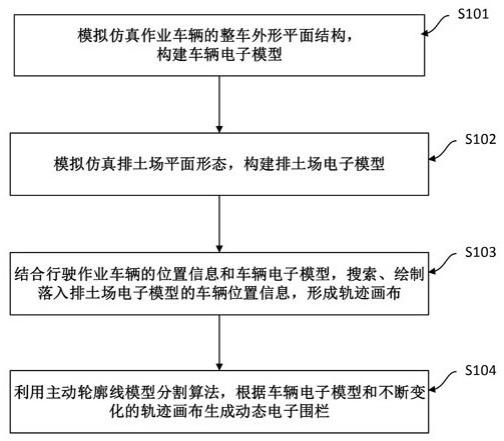
45.实施例1:如附图1所示,本实施例公开了一种动态电子围栏的形成方法,包括:
46.步骤s101,模拟仿真作业车辆的整车外形平面结构,构建车辆电子模型;
47.步骤s102,模拟仿真排土场平面形态,构建排土场电子模型;
48.步骤s103,结合行驶作业车辆的位置信息和车辆电子模型,搜索、绘制落入排土场电子模型的车辆位置信息,形成轨迹画布;
49.步骤s104,利用主动轮廓线模型分割算法,根据车辆电子模型和不断变化的轨迹画布生成动态电子围栏。
50.本发明实施例公开了一种动态电子围栏的形成方法,构建车辆电子模型和排土场电子模型,结合行驶作业车辆的位置信息及利用主动轮廓线模型分割算法完成动态电子围栏的建立,通过动态电子围栏识别出安全排土区与示警区,对不断推进排土场的作业车辆进行安全排土区设定,向驾驶员提供安全报警辅助信息,既保证了作业车辆不掉下填埋层,又保证了作业车辆倾倒的矿渣不在填埋层上堆积,有效降低了事故率,提高了安全生产效率。
51.实施例2:如附图1所示,本实施例公开了一种动态电子围栏的形成方法,包括:
52.步骤s201,模拟仿真作业车辆的整车外形平面结构,构建车辆电子模型;
53.这里构建车辆电子模型,包括:
54.s2011,采集作业车辆的车辆信息,其中,作业车辆的车辆信息包括车长、车宽、高精度定位仪定位点;
55.s2012,根据作业车辆的车辆信息,建立3*3矩阵,获得作业车辆平面结构,确定车辆电子模型。这里建立矩阵,确定车辆电子模型后可以将矩阵简化为数据,并存入数据库,存入时可以进行比对去重。
56.例如,如附图2所示,车辆电子模型如3*3的矩阵所示,将矩阵进行简化,简化形式为c=f(x,y),其中c是f(x,y)任意点(x,y)的灰度级,255代表白色。
57.步骤s202,模拟仿真排土场平面形态,构建排土场电子模型;
58.这里如附图3所示,构建排土场电子模型,包括:
59.步骤s2021,采集排土场第一信息,其中,排土场第一信息包括排土场四个角的位置信息、排土场第一层所处的海拔高度;这里可以通过画笔矩形工具在电子地图上进行标记,排土场四个角的位置信息即为四个角的经纬度信息;
60.步骤s2022,根据排土场信息,建立n*n的矩阵,模拟排土场平面结构,作为排土场电子模型的第一层;这里排土场电子模型的第一层包括:海拔高度、四个角的经纬度(经纬度需换算为整数);建立n*n的矩阵,n由现场安全预警的精度决定;
61.步骤s2023,采集排土场第二信息,其中,排土场第二信息包括排土场层高差、层间距;这里排土场第二信息可以根据地理测绘数据和排土场层高设计要求进行灵活获取;
62.步骤s2024,根据排土场第二信息建立排土场电子模型的其余层。这里确定排土场电子模型后可以将矩阵简化为数据,并存入数据库,存入时可以进行比对去重。其中矩阵简化形式为r=g(x,y,alt),其r是g(x,y)任意点(x,y)的灰度级,alt为海拔高度。
63.综上可以看出排土场电子模型即为一个多层平面空白画布,层数根据实际地理测绘数据和排土场层高进行设定。
64.步骤s203,结合行驶作业车辆的位置信息和车辆电子模型,搜索、绘制落入排土场电子模型的车辆位置信息,形成轨迹画布。轨迹画布形成后可以转化为json数据,存储至数据库。
65.这里如附图4所示,形成轨迹画布,包括:
66.步骤s2031,采集行驶作业车辆的位置信息,位置信息包括车辆id、经度、纬度、海拔高度;这里通过车辆id,则可以获取到该作业车辆的车辆电子模型;
67.步骤s2032,在排土场电子模型第一层的覆盖范围内,获取行驶作业车辆的位置信息中的海拔高度信息,匹配与之最接近的一层排土场电子模型;
68.具体包括:
69.首先,根据行驶作业车辆的位置信息中的海报高度,通过计算获取h值;
70.h=alt
‑
alt(k)|
(k=1~n)
71.其次,计算获取|h|值与阈值μ之间差值δ,根据δ匹配与之最接近的一层排土场电子模型;
72.δ=||h|
‑
μ||
73.其中,alt表示作业车辆实时海拔高度值,
‑
h表示行驶中的作业车辆位置低于排土场电子模型设计的固定海拔高度,否则表示高于;alt(k)为第k层排土场电子模型所在的固定海拔高度;n代表排土场电子模型的层数。
74.步骤s2033,获取行驶作业车辆的最新位置信息,在匹配到的排土场电子模型上描绘该位置信息,形成轨迹画布。这里可以通过画笔将行驶作业车辆的最新位置信息描绘在匹配到的排土场电子模型上,即描绘到匹配到的画布上,形成轨迹画布。
75.这里若设定l=s(x,y)为轨迹画布的计算公式;其中,f(x,y)代表车辆电子模型,g(x,y,alt)表示排土场电子模型,long代表经度,late代表纬度,alt代表海拔高度,则轨迹画布计算公式如下所示:
76.s(x,y)=f(x,y)|(long,late)
‑
g(x,y,alt)|(long,late,alt)
77.通过上述公式反复计算x次后,可以得到行驶车辆在空白画布上形成的轨迹分布图,该图即为轨迹画布,视觉上表现为灰度图。
78.步骤s204,利用主动轮廓线模型分割算法,根据车辆电子模型和不断变化的轨迹画布生成动态电子围栏;
79.这里如附图5所示,生成动态电子围栏,包括:
80.步骤s2041,获取多个轨迹画布;
81.步骤s2042,将车辆电子模型作为主动轮廓线模型的输入,获得由多个轨迹点形成的区域轮廓线,初步划定的电子围栏界限;
82.步骤s2043,根据行驶作业车辆的位置信息的变化,轨迹画布不断变化,重复上述过程,更新电子围栏界限,形成动态电子围栏。
83.上述步骤以画布为基础数据,采用主动轮廓线模型(gac模型),结合图像梯度信息和演化曲线的位置,用与演化曲线内外的梯度信息有关的演化速度v根据其位置自适应的向内或向外运动,达到目标的边界。gac模型是基于曲线演化和水平集理论的方法,对画布进行特征分割的处理流程包括:
84.1、读取“画布”二维图像;2、图像灰度化预处理;3、进行高斯差分处理;4、设置时间步长,演化速度v等参数,建立零水平集;5、设置迭代次数n;6、基于迭代次数进行分割图像;7、筛选出最优的分割区域;8、输出图像。
85.上述建立零水平集通过水平集函数进行定义,具体如下:
86.水平集函数的作用是为了解决目标的追踪问题,我们将三维连续函数{(x,y)|φ(x,y,t)=0}定义为零水平集或者零水平线,φ(x,y,t)称为水平函数,在动态轮廓曲线模型中又称为符号距离函数,用于计算平面内某一点到轮廓线距离的函数,下面水平集的演化方程被写成如下的形式表示:
[0087][0088]
其中,φ代表需要更新的水平集函数,sign(φ0)代表符号函数。
[0089]
内部能力公式:p(φ)作为φ与符号距离函数逼近程度的一种度量标准;
[0090][0091]
其中,ω表示图像区域,p(φ)为一种度量标准。
[0092]
外部能量公式:外能函数在水平集运动的过程中,引导零水平线向着期望的目标运动。
[0093][0094]
即为:
[0095][0096]
边界追踪函数:一般定义如下:
[0097][0098]
其中,x为2或者1,g为图像滤波中经常使用的gauss函数,σ为它的方差,i为图像,h为heaviside函数,表达式如下:
[0099][0100]
上述所有位置信息均可使用高精度定位仪进行实时监测。
[0101]
实施例3:如附图6所示,本实施例公开了一种动态电子围栏的形成装置,包括:
[0102]
第一模型构建单元,模拟仿真作业车辆的整车外形平面结构,构建车辆电子模型;
[0103]
第二模型构建单元,模拟仿真排土场平面形态,构建排土场电子模型;
[0104]
轨迹画布绘制单元,结合行驶作业车辆的位置信息和车辆电子模型,搜索、绘制落入排土场电子模型的车辆位置信息,形成轨迹画布;
[0105]
电子围栏生成及更新单元,利用主动轮廓线模型分割算法,根据车辆电子模型和不断变化的轨迹画布生成动态电子围栏。
[0106]
实施例4:如附图1所示,本实施例公开了一种车辆运行控制方法,包括:
[0107]
步骤s401,通过动态电子围栏的形成方法生成动态电子围栏;
[0108]
步骤s402,将动态电子围栏描绘显示在电子地图上;
[0109]
步骤s403,在电子地图上显示作业车辆的位置信息,将作业车辆的位置信息到动态电子围栏的距离,并设定对应的安全距离信息,根据安全距离信息对作业车辆发出安全示警信息。
[0110]
这里通过上述步骤实现安全警示的过程,即如下所示:
[0111]
1、获取行驶作业车辆的位置信息p(x0,y0);
[0112]
2、令d(x,y)为行驶作业车辆的位置信息p(x0,y0)到电子围栏边界(零水平集)的最短垂直逼近距离;
[0113]
3、将d(x,y)与安全距离信息进行比对,超过安全距离信息,则发出示警信息至作业车辆的车载终端。
[0114]
以上技术特征构成了本发明的最佳实施例,其具有较强的适应性和最佳实施效果,可根据实际需要增减非必要的技术特征,来满足不同情况的需求。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。