1.本发明属于动载荷识别领域,具体涉及一种基于相位差的动载荷频域识别方法。
背景技术:
2.动载荷识别是属于结构动力学的逆问题的研究范畴,它通过传感器测出结构的响应,如位移、速度、加速度,再由此推到出载荷。在多数情况下振动是有害的,这也是其引起重视的最主要原因。如汽车、直升机、飞机等交通工具在运行过程中的振动,会影响乘客的舒适性及安全性,严重的时候甚至会产生事故;机床等精密加工设备,在工作时床身的振动或者外界的扰动都会使加工的工件受到影响。
技术实现要素:
3.针对现有技术中存在的问题,找到引起振动的振动源是解决该问题的关键点,本发明提出一种基于相位查的动载荷频域识别方法,本发明的方法在工程实践的基础上,寻找引起振动响应的激励源信号的位置以及其大小,具有较高的识别精度且方案简单,解决了现有技术中的缺陷。
4.本发明是这样实现的:
5.一种基于相位差的动载荷频域识别方法,所述的识别方法具体为:
6.步骤一、在目标结构体上设置多个测量点,获取测量点在一个或多个集中载荷作用下产生的加速度或者位移响应;
7.步骤二、对响应信号进行傅里叶变换,求得激励信号的频率分布及响应信号的幅值和相位;
8.步骤三、针对每个频率进行单独分析,求得两个响应点之间的相位差,然后根据动力学模型建立基于频响函数的相位差模型,该模型的相位差和之前求得的相位差在数值上等价,求解出激励的位置,最后根据位置信息得到激励的幅值和相位。
9.进一步,所述的步骤三具体为:
10.若激励信号为f(ω,θ,a)的正弦信号作用在x
a
处,结构上任意点x的响应为u(ω,θ,a)=h(ω)f(ω,θ,a)
[0011][0012]
其中ω、θ、a表示频率、相位和幅值,u表示位移响应,h表示频响函数,,由于阻尼的存在,h(ω)为复数;
[0013]
u(θ)=angle(h(ω)) f(θ)
[0014][0015]
其中u(θ)表示位移响应的相位,f(θ)表示激励信号的相位,angle(h(ω))表示因
阻尼的阻碍,导致响应的相位的滞后量;
[0016]
若在结构上分别取两个响应点x1和x2,则两点处的响应相位分别为
[0017]
u1(θ1)=angle(h1(ω)) f(θ)
[0018]
u2(θ2)=angle(h2(ω)) f(θ)
[0019]
可得响应点之间的相位差为
[0020]
δθ=u1(θ1)
‑
u2(θ2)
[0021]
=angle(h1(ω)) f(θ)
‑
angle(h2(ω))
‑
f(θ)
[0022]
=angle(h1(ω))
‑
angle(h2(ω))
[0023]
上式中δθ表示两个响应点之间的相位差,实验获取两个响应点的相位差为θ1‑
θ2,和推导出的δθ等价,即
[0024]
δθ(x
a
)=θ1‑
θ2[0025]
f=|δθ(x
a
)
‑
(θ1‑
θ2)|=0
[0026]
再利用数值求解方法求解f,可以得到激励点的位置x
a
[0027]
已知位置x
a
的情况下,
[0028]
u(a)=abs(h(ω))f(a)
[0029]
u(θ)=angle(h(ω)) f(θ)
[0030][0031][0032]
其中abs(h(ω))表示响应信号和激励信号的幅值比,f(a)、u(a)分别表示激励信号的幅值和响应信号的幅值,利用上述公式可以直接求解出激励信号的幅值和相位。
[0033]
本发明与现有技术的有益效果在于:本发明利用傅里叶变换将复杂的响应信号分解成多个简谐信号叠加,然后分别对每个频率进行单独的考虑,识别出每个频率对应的激励信号位置、幅值、相位,极大的减少了运算量,提高识别效率。在不存在频率完全相同的两个激励信号时,可以通过不同频率对应的位置信息判断激励源的数目。此外,本发明提高了识别效率,而且具有很高的识别精度且易于实施,适合于各类结构。
附图说明
[0034]
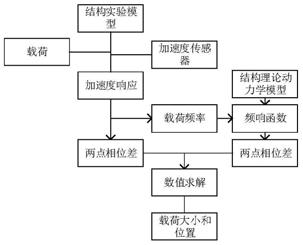
图1是本发明一种基于相位差的动载荷频域识别方法的流程图;
[0035]
图2是本发明实施例中单点激励下简支梁模型图;
[0036]
图3是本发明实施例中单点激励下的位移响应图;
[0037]
图4是本发明实施例中单点激励下的位移响应图;
[0038]
图5是本发明实施例中多点激励下简支梁模型图;
[0039]
图6是本发明实施例中多点激励下的位移响应图;
[0040]
图7是本发明实施例中多点激励下的位移响应图。
具体实施方式
[0041]
为使本发明的目的、技术方案及效果更加清楚,明确,以下列举实例对本发明进一步详细说明。应当指出此处所描述的具体实施仅用以解释本发明,并不用于限定本发明。
[0042]
本发明提出一种基于相位差的动载荷的频域识别方法,如图1所示,首先获取测量点在一个或多个集中载荷作用下产生的位移响应;对响应信号进行傅里叶变换求得信号的频率分布;对每个频率从动力学建模和实验结果两个方面进行考虑,实验获取两点的相位差,动力学建立基于频响函数的相位差模型,两者在数值上等价,求解出载荷的位置和大小。
[0043]
在本发明下列的具体实施案例中,通过采用集中载荷作用下的简支梁模型,分析两点相位差的载荷识别模型的过程,具体的操作步骤如下:
[0044]
如图2所示,实施例中简支梁长0.7m,界面宽度为0.04m,截面高度为0.008m,弹性模量为206gpa,密度为7900kg/m3,阻尼系数为0.03。
[0045]
在简支梁上激励位置x
a
为0.2m施加正弦单点激励信号
[0046]
f(t)=100sin(2π40*t) 50*sin(2π20*t)
[0047]
取响应位置x1、x2分别为0.3m和0.6m,则得到两点的位移响应为图3和图4所示,再利用傅里叶变换获取响应的频率ω1=40hz、ω2=20hz,以及不同响应点对应的相位和幅值,具体数值如表1所示。
[0048]
表1
[0049][0050]
则可以试验求得这两个点之间的相位差,再理论推导获取基于频响函数的相位差模型。因为激励信号为f(ω,θ,a)的正弦信号作用在x
a
处,简支梁上任意点x的响应为
[0051]
u(ω,θ,a)=h(ω)f(ω,θ,a)
[0052]
其中由于阻尼的存在,h(ω)为复数。
[0053]
u(θ)=angle(h(ω)) f(θ)
[0054]
其中表示因阻尼的阻碍,导致响应的相位的滞后量。
[0055]
若分别取两个响应点x1和x2,则两点处的响应相位分别为
[0056]
u1(θ1)=angle(h1(ω)) f(θ)
[0057]
u2(θ2)=angle(h2(ω)) f(θ)
[0058]
则响应点之间的相位差为
[0059]
δθ=u1(θ1)
‑
u2(θ2)
[0060]
=angle(h1(ω)) f(θ)
‑
angle(h2(ω))
‑
f(θ)
[0061]
=angle(h1(ω))
‑
angle(h2(ω))
[0062]
推导出的相位差δθ和实验获取两个响应点的相位差为θ1‑
θ2等价,即
[0063]
δθ(x
a
)=θ1‑
θ2[0064]
再利用数值求解的方法求出上述等式,则可以获取激励的位置。
[0065]
载荷位置x
a
的已经得出的情况下,
[0066]
u(a)=abs(h(ω))f(a)
[0067]
其中u、f分别表示响应信号的幅值与激励信号的幅值,可以直接求解出激励信号的幅值。
[0068]
u(θ)=angle(h(ω)) f(θ)
[0069]
其中可以直接求解出激励信号的相位。激励信号的位置、幅值和相位的结果如表2所示。
[0070]
表2
[0071] ω1ω2激励位置0.20000.2000激励幅值10050激励相位00
[0072]
在验证单点激励后,再使用同样的方法验证多点激励,如图5所示,激励位置x
a
=0.2m及x
b
=0.1m分别施加正弦激励信号
[0073]
f
a
(t)=100sin(2π40*t)
[0074]
f
b
(t)=50sin(2π20*t)
[0075]
响应位置x1、x2分别为0.3m和0.6m,则得到两点的位移响应如图6和图7所示。
[0076]
具体步骤与上述单点激励的方法一样,这里不做重复书写。
[0077]
利用傅里叶变换获取响应的频率ω1=40hz、ω2=20hz,以及不同响应点对应的相位和幅值,再分别对频率ω1及ω2进行求解,得到两个频率对应的激励信号位置,计算得出响应位置后,再求出激励信号的位置、幅值及相位,具体的数值如表3所示。
[0078]
表3
[0079] ω1ω2激励位置0.20000.1000激励幅值10050激励相位00
[0080]
综上两个频率单点和多点激励仿真结果可知,在没有外界干扰的条件下基于相位差模型的载荷识别方法有效,能准确的识别出激励的位置、幅值及相位,而且可以通过对不
同频率进行分析,解决激励信号不存在同频现象时激励数目的识别问题。
[0081]
以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理的前提下,还可以做出若干改进,这些改进也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。