技术特征:
1.一种基于相位差的动载荷频域识别方法,其特征在于,所述的识别方法具体为:步骤一、在目标结构体上设置多个测量点,获取测量点在一个或多个集中载荷作用下产生的加速度或者位移响应;步骤二、对响应信号进行傅里叶变换,求得激励信号的频率分布及响应信号的幅值和相位;步骤三、针对每个频率进行单独分析,求得两个响应点之间的相位差,然后根据动力学模型建立基于频响函数的相位差模型,该模型的相位差和之前求得的相位差在数值上等价,求解出激励的位置,最后根据位置信息得到激励的幅值和相位。2.根据权利要求1所述的一种基于相位差的动载荷频域识别方法,其特征在于,所述的步骤三具体为:若激励信号为f(ω,θ,a)的正弦信号作用在x
a
处,结构上任意点x的响应为u(ω,θ,a)=h(ω)f(ω,θ,a)其中ω、θ、a表示频率、相位和幅值,u表示位移响应,h表示频响函数,,由于阻尼的存在,h(ω)为复数;u(θ)=angle(h(ω)) f(θ)其中u(θ)表示位移响应的相位,f(θ)表示激励信号的相位,angle(h(ω))表示因阻尼的阻碍,导致响应的相位的滞后量;若在结构上分别取两个响应点x1和x2,则两点处的响应相位分别为u1(θ1)=angle(h1(ω)) f(θ)u2(θ2)=angle(h2(ω)) f(θ)可得响应点之间的相位差为δθ=u1(θ1)
‑
u2(θ2)=angle(h1(ω)) f(θ)
‑
angle(h2(ω))
‑
f(θ)=angle(h1(ω))
‑
angle(h2(ω))上式中δθ表示两个响应点之间的相位差,实验获取两个响应点的相位差为θ1‑
θ2,和推导出的δθ等价,即δθ(x
a
)=θ1‑
θ2f=|δθ(x
a
)
‑
(θ1‑
θ2)|=0再利用数值求解方法求解f,可以得到激励点的位置x
a
已知位置x
a
的情况下,u(a)=abs(h(ω))f(a)u(θ)=angle(h(ω)) f(θ)
其中abs(h(ω))表示响应信号和激励信号的幅值比,f(a)、u(a)分别表示激励信号的幅值和响应信号的幅值,利用上述公式可以直接求解出激励信号的幅值和相位。
技术总结
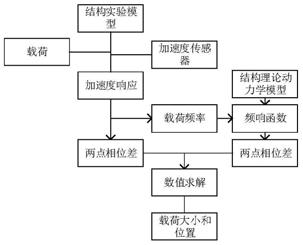
本发明公开了一种基于相位差的动载荷的频域识别方法,属于动载荷识别领域,包括以下步骤:在目标结构体上设置多个测量点,获取测量点在一个或多个集中载荷作用下产生的位移响应;傅里叶分解与动载荷识别相结合,对响应信号分解求得激励信号的频率分布;对每个频率从动力学建模和实验结果两个方面进行考虑,实验获取两点的相位差,动力学建立基于频响函数的相位差模型,两者在数值上等价,求解出载荷的位置和大小;本发明的方法在工程实践的基础上,寻找引起振动响应的激励源信号的位置以及其大小,具有较高的识别精度且方案简单。具有较高的识别精度且方案简单。具有较高的识别精度且方案简单。
技术研发人员:秦远田 张炉平 唐甜 张浩阳
受保护的技术使用者:南京航空航天大学
技术研发日:2021.08.13
技术公布日:2021/12/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。