1.本发明属于飞行器设计技术领域,具体设计一种可倾转共轴双桨多动力涵道的载人飞行器。
背景技术:
2.目前,在日常民用载人飞行器中主流的起降方式为水平起降。而相较于水平起降飞 行器,垂直起降飞行器具备起降灵活、环境适应性高等特点,将大大降低对于机场等飞行器 配套设施的占地需求。而相较于传统的旋翼无人机而言,固定翼飞行器巡航效率更高,故兼 备垂直起降能力与固定翼优势的飞行器将在低空通勤、短距货物投递、疫苗运输分配、灾情 物资保障等领域具有较强优势。
[0003][0004]
目前,许多公司都在积极研发“飞行汽车”项目,主要对标城市交通中的短途低空通勤。其中,如美国的archer、joby及国产的亿航184等主流在研项目皆是以多旋翼为主的载人飞行器,且其旋翼式样主要为自由螺旋桨。多旋翼载人飞行器机体结构紧凑、技术成熟度较高因而被主流研发所青睐,但自由螺旋桨在运转过程中所产生的较大噪音,这对于城市空中交通的需求而言有待改善。同时,传统多旋翼飞行器受限于其气动布局的缘故,在机动性、巡航效率等方面表现较差。而在当下,受制于电池技术的发展,纯电驱动的多旋翼飞行器其续航时间将大打折扣;传统纯旋翼飞行器通过增加旋翼数量来提高飞行器冗余度,但过多的旋翼数量可能降低飞行器周期负载能力的表现。
技术实现要素:
[0005]
本发明的目的在于提供一种可倾转共轴双桨多动力涵道的载人飞行器,在兼备垂直起降能力的同时具有较高的机动性与巡航效率,采用独特的气动布局增加飞行器的整体气动效率,进一步改善全电动飞行器所面临的续航时长等问题。同时舵控与动力涵道倾转相结合的控制方式将大大减轻由于多动力涵道所致较大的周期负载,有效实现结构的紧凑化、模态转换的简单化、功能实现的自主化。
[0006]
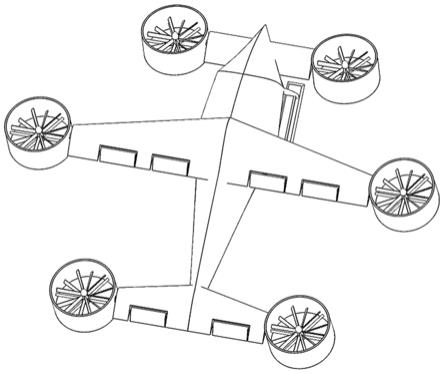
为实现上述发明目的,本发明提供如下技术方案:一种可倾转共轴双桨多动力涵道的载人飞行器,包括:机体、姿态传感器等、前翼、前动力涵道、起落支架、主翼、主动力涵道、后动力涵道、水平尾翼、水平尾翼上的升降舵、襟翼、主翼上的副翼、电源管理系统、飞行控制模块、客舱;其中机身具有前端与后端部分,机身定义了所述载人飞行线的中心轴线,其前端部分包含客舱所在位置,其后端部分靠近客舱处布有电源管理系统与飞行控制模块;主动力涵道、前动力涵道、后动力涵道分别经由电机驱动的转动轴安装至主翼、前翼与水平尾翼相应末梢处;且三对动力涵道皆为共轴双桨的电动涵道,分别于相应传动轴固连,可由电机驱动沿机身轴向做一定角度的俯仰转动;其中前翼、主翼、水平尾翼皆为平直翼,其中主翼、水平尾翼两者的前缘部分都是
后掠的;主翼后缘部分设有襟翼、副翼,其中襟翼靠近机翼根部,副翼靠近机翼梢部,两者皆可沿机身轴向做一定角度的俯仰转动;水平尾翼后缘部分设有升降舵,可沿机身轴向做一定角度的俯仰转动;所述飞行控制模块位于机体内部,通过既定控制逻辑配合达到无人驾驶自主控制完成飞行过程;所述起落支架位于机体下方,可为乘客进入客舱提供登机台阶。
[0007]
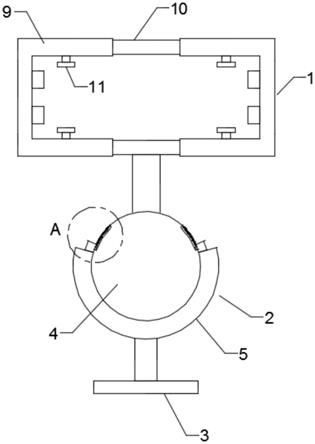
多动力涵道采用的是共轴双桨的涵道螺旋桨,包括收缩涵道、轴支杆、正反螺旋桨等,共计三对六发电动涵道为飞行器提供飞行动力。其中,这三对动力涵道的涵道罩分别与转动轴固连,而传动轴另一边分别与前翼、主翼、水平尾翼连接。经电机驱动,前动力涵道、主动力涵道与后动力涵道可相应做出相应角度的俯仰倾转以此来改变涵道推力方向配合飞行,以协助实现该飞行器的垂直起降、水平巡航等各飞行模态转换。
[0008]
三对动力涵道皆为共轴双桨的电动涵道,双桨式的设计给予电动涵道更高的气动效率并增加了冗余度,提高无人机的安全性,涵道罩的设计大大削弱了噪音强度。
[0009]
飞行器采用了舵控与动力涵道倾转相结合的姿态控制方法,其前翼、主翼、水平尾翼机翼末端为可倾转动力涵道,经电机驱动各涵道可独立做不同俯仰角度的倾转以提供不同方向的推力。在而在主翼、水平尾翼机翼后缘部分相应的舵面(襟翼、副翼、升降舵)可在飞行阶段中调整开闭情况,改变飞行力矩。通过调整各动力涵道与相关舵面的倾转,可在飞行中共同运转调整飞行力矩,以操纵飞行器在空中调整飞行姿态,进行飞行模态转换。
[0010]
飞行器为全电动垂直起降飞行器,其动力源于电源管理系统中蓄电池模组向全机输送电力驱动。
[0011]
在飞行操纵方面,采用全电传操纵系统由飞行控制模块自主控制实现无人驾驶。在必要时候也可由人工介入操纵,以确保飞行安全。
[0012]
该飞行器独特的飞行控制方式,依次包括垂直起飞、空中悬停、爬升阶段、水平巡航、下降阶段、垂直降落过程,各过程控制方法如下:s垂直起飞:起飞前各动力涵道轴向均垂直于地面,主翼与水平尾翼后缘处相应的舵面闭合,前动力涵道、主动力涵道、后动力涵道开始运作产生升力,所述载人飞行器水平停落地面垂直起飞;s空中悬停:飞行器机体内飞行控制模块处理来自姿态传感器等信号后判断当下飞行姿态是否稳定,并对三对动力涵道的倾转角度进行反馈调整直至飞行器稳定悬停至空中;s爬升阶段:逆时针偏转三对动力涵道斜向下提供推力,经姿态传感器等获得飞行参数由飞行控制模块计算输出相应指令调整倾转各涵道角度及舵面开闭情况,使飞行器获得足够升力稳定向前爬升。所述逆时针方向指主翼外侧向机体观察为逆时针的方向;s水平巡航:三对动力涵道轴向大致与来流方向大致一致,飞行器通过飞行控制模块控制主翼、水平尾翼上舵面襟翼、副翼、升降舵的开闭情况并微调三对动力涵道的倾转角度,以此来完成飞行器在巡航阶段的飞行姿态调整;s下降阶段:顺时针偏转三对动力涵道斜向下提供推力,经姿态传感器等及飞行控制模块配合计算输出相应指令调整舵面倾转角度,飞行器朝下降方向进行减速下降并最终按s稳步调整至飞行器悬停在空中。所述顺时针方向指主翼外侧向机体观察为顺时针的方
向;s垂直降落:当机体与地面呈水平方向且得以稳定悬停在空中时,各动力涵道螺旋桨转速逐渐降低,升力减小,经由姿态传感器等及飞行控制模块配合控制调整各活动部件倾转角度,飞行器开始稳定垂直降落直至最终起落支架触地,飞行器平稳着地。
[0013]
本发明的有益效果是:在动力系统方面采用多发双桨式涵道螺旋桨,可以有效降低飞行过程中所产生的噪音,同时增加发动机气动效率,提高飞行器冗余度,增强飞行安全性。在飞行控制系统方面,通过舵控与动力涵道倾转相结合的姿态控制方法,能够较快提供足够大的飞行力矩,使飞行器对控制指令快速响应,提升飞行器姿态控制的灵敏度。同时,舵面控制的引入可以大大增强飞行器在爬升阶段、水平巡航、下降阶段的整体气动效率,降低动力涵道运转功率,减少了飞行过渡期间动力涵道对机翼的负载,改善飞行器周期负载能力,也适应于更长续航时间的应用需求。
附图说明
[0014]
图1是本发明一种可倾转共轴双桨多动力涵道的载人飞行器的三向等视示意图。
[0015]
图2是本发明一种可倾转共轴双桨多动力涵道的载人飞行器飞行模态转换过程示意图。
[0016]
图3是本发明一种可倾转共轴双桨多动力涵道的载人飞行器的一种飞行过程逻辑流程图。
[0017]
图4是本发明一种可倾转共轴双桨多动力涵道的载人飞行器的示意图。
具体实施方式
[0018]
下面将参考附图更详细地描述实施方式,附图形成了实施方式的一部分并以图解的方式示出了具体的示例性实施方式。这些实施方式足够详细地被公开,以使本领域技术人员能够实践本发明。然而,实施方式可以不同的形式被实现,并且不应该被解释为限于在这里阐述的实施方式。因此,下面的详细描述不应被视为具有限制意义。
[0019]
本技术的实施方式,所涉及的飞行器部件基本上被描绘在附图一中,附图二为所述载人飞行器一次完整飞行的模态转换过程示意图,其控制逻辑流程图可见附图三。
[0020]
实施例子:乘客来到所述载人飞行器水平停落的位置,经由起落支架(5)所设台阶登上机体(1)进入客舱(15),随后由飞行控制模块(14)进行本次飞行自主化操纵。
[0021]
电源管理系统(13)开始向全机供电,飞行器进入初始状态。飞行控制模块(14)输出指令操纵各活动部件初始化,前动力涵道(4)、主动力涵道(7)、后动力涵道(8)各传动轴相应独立电机响应,确保各动力涵道轴向垂直于地面;主翼(6)、水平尾翼(9)后缘处相应舵面(襟翼(11)、副翼(12)、升降舵(10))闭合。飞行器进入初始状态后,各涵道开始运转,螺旋桨加速旋转,直至提供足够升力使载人飞行器垂直起飞。
[0022]
飞行器进入垂直起飞阶段后,姿态传感器等(2)输出信号由飞行控制模块(14)自主进行计算检测,判断当下飞行器能否稳定悬停在空中。如若无法稳定悬停,由飞行控制模块(14)输出指令对各涵道螺旋桨的转速及倾转角度进行反复调整并进行反馈,直至飞行器
在空中达到平稳状态,实现空中悬停。
[0023]
飞行器进入空中悬停状态后,通过飞行控制模块(14)在逆时针偏转三对动力涵道(4)(7)(8)的同时,增大涵道螺旋桨转速,开启襟翼(11)、升降舵(10),飞行获得足够的升力朝向飞行方向爬升。在此爬升阶段期间,姿态传感器等(2)不断检测飞行数据以便飞行控制模块(14)及时调整各部件运转。在向前飞行过程中当襟翼(11)、升降舵(10)开始为飞机提供部分升力的同时,各涵道(4)(7)(8)螺旋桨转速降低,舵面与涵道所提供升力在飞控中达到动态平衡的状态,以确保飞行器平稳爬升飞行。所述逆时针方向指主翼(6)外侧向机体(1)观察为逆时针的方向。
[0024]
飞行器爬升到预定高度后,各动力涵道(4)(7)(8)进一步逆时针倾转至其轴向大致与来流方向一致,各舵面(10)(11)(12)根据飞行情况进行开闭调整。期间,上述部件运转包括各涵道螺旋桨转速皆由飞行控制模块(14)得到姿态传感器等(2)传输的信号后进行控制。舵面与涵道所提供升力在飞控中达到动态平衡的状态,以确保飞行先平稳巡航。所述逆时针方向指主翼(6)外侧向机体(1)观察为逆时针的方向。
[0025]
飞行器飞行预定距离完成水平巡航后,开始进入下降阶段。通过飞行控制模块(14)在顺时针偏转三对动力涵道(4)(7)(8)的同时,开启襟翼(11)、升降舵(10),飞行获得足够的升力朝向飞行方向下降。在此下降阶段期间,姿态传感器等(2)不断检测飞行数据以便飞行控制模块(14)及时调整各部件运转。在下降飞行过程中襟翼(11)、升降舵(10)始终为飞行器提供升力,各涵道(4)(7)(8)逐渐偏转至轴向垂直与地面。期间,舵面与涵道所提供升力在飞控中达到动态平衡的状态,以确保飞行器得以平稳下降至悬停状态。所述顺时针方向指主翼(6)外侧向机体(1)观察为逆时针的方向。
[0026]
飞行器得以稳定悬停在目的地上空后,各涵道(4)(7)(8)螺旋桨逐渐减速,各舵面(10)(11)(12)闭合,飞行器升力减小,逐渐垂直降落直至最终起落支架(5)触地,飞行器平稳着地。期间,各活动部件倾转角度经由姿态传感器等(2)及飞行控制模块(14)配合控制。
[0027]
待飞行器平稳着地后,客舱(15)门开启,乘客下台阶(起落支架(5)设有一阶台阶)抵达目的地,本次飞行结束。
[0028]
以上结合具体实施方式对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。