1.本实用新型涉及果园水肥一体化技术应用领域,具体为一种多通道移动式果园灌溉施肥技术。
背景技术:
2.目前在果园栽培管理中,灌溉施肥过程大多采用大水漫灌以及人工施肥方法,造成水资源和劳动力的浪费。不易精准控制施肥量与灌溉量,施肥的均匀性难以保证。合理的果园施肥灌溉技术可以高效使用肥料,同时降低化学肥料对生态环境的危害。采用精准的变量施肥技术,可以提高土壤养分含量、减少地下水污染、确保果实的品质。灌溉施肥一体化技术已成为目前果园灌溉施肥的重要研究方向。可根据不同的果树的不同生长期需水、需肥规律,将水分、养分定时定量,按比例直接提供给作物。
3.现有的果园移动式施肥机如cn112352522a中所涉及的一种果园气爆式液肥打孔施肥机及施肥方法,采用将移动行走装置与供肥装置相结合,打孔气爆注肥装置与供肥装置相结合,实现将液肥注入果园土壤中进行作业,但施肥量的调节主要受高压气体量的限制,不易精确控制施肥量。cn210381827u中所发明的一种果园水肥一体化多功能机械设备,通过将空心犁与高压泵吸取配置好的水溶肥相结合,可实现施水追肥灌药等多种功能。移动式牵引设计,可适应不同果园的作业需求,提高装置使用效率,但存在着肥料种类较少,施肥通道数较少,无法实现按照不同果树、不同生长季的营养需求,及时动态调整施肥配方问题。cn10635855b中发明的一种灌状施肥装置及定量施肥方法,采用施肥罐与射流混合施肥器相结合的设计,实现定比例或定量施肥。cn210406205u公开了一种不稳定水源移动式水肥一体化设备,cn111316807a公开了一种适用于山地果园的水肥一体化滴灌方法,cn111837778 a公开了一种苹果各生育阶段的“替
‑
专
‑
精
‑
减”灌溉施肥方法,cn207321893u公开了一种水肥药喷洒移动车。由于不同果树的不同生长季所需营养参数不同,采用固定吸肥比例的吸肥装置,无法根据需求,及时调整施肥配方;固定式泵房灌溉施肥装置的水肥混合液须经管道长距离输送,在进行施肥浓度调解时的滞后性较大。
技术实现要素:
4.本实用新型的目的在于提供一种多通道移动式果园灌溉施肥机,以动态调整灌溉施肥配方、精准控制施肥浓度与灌溉量,解决传统果园灌溉施肥过程中劳动强度大、灌溉施肥控制精度低和水肥资源浪费严重等问题,实现果园灌溉施肥的高效管理与精准控制,有助于果园生产管理实现高效、持续、集约的发展。
5.为了实现上述目的,本实用新型采用的技术方案如下。
6.一种多通道移动式果园灌溉施肥机,其特征在于包括:牵引式行走装置、混肥装置、精量吸肥装置、水肥参数检测装置、动力系统以及控制系统(8);
7.所述混肥装置包括依次连接的进水主管道(16)、注水口(18)、混肥罐(15)、离心泵(2)、灌溉施肥主管道(7);
8.所述精量吸肥装置包括通过管道依次连接的母液罐(9)、过滤器(17)、吸肥电磁阀(3)、文丘里吸肥器(1);所述精量吸肥装置包括通过管道依次连接的两个或两个以上个吸肥通道;所述吸肥通道由母液罐(9)、过滤器(17)、吸肥电磁阀(3)、文丘里吸肥器(1)、注肥口(21);所述吸肥电磁阀(3)与控制系统(8)电连接;
9.所述控制系统(8)由plc控制器、触摸显示屏、交流接触器、中间继电器、熔断器、固态继电器以及控制开关组成;plc控制器分别与触摸显示屏、中间继电器、熔断器、固态继电器、控制开关电连接;
10.所述水肥参数检测装置包括分别与控制系统(8)电连接的ec传感器(4)、液位传感器(19)、压力传感器(5)、流量传感器(6);
11.所述动力系统包括车载柴油发电机(13),其输出端与控制系统(8)的电源输入端电连接。
12.所述机罩(12)四周均设置有可开闭的操作门(14);机罩(12)前部设置有透明观察窗(11)。
13.所述混肥装置与精量吸肥装置通过固定元件固定于四轮移动平台(10)上表面。
14.所述混肥罐(15)设置有注水口(18)、注肥口(21)、营养液出口(20);所述注水口(18)与注肥口(21)分别设置于混肥罐(15)罐壁上部两侧;营养液出口(20)设置于混肥罐(15)的罐壁底部,并与离心泵(2)的吸水口连接;所述混肥罐(15)内壁上部设置有浮球阀(22),用于控制最高水位高度;所述混肥罐(15)内壁底部设置有液位传感器(19)。
15.所述进水主管道(16)上部与所述混肥罐注水口(18)相连接,下部与果园灌溉水源管道相连接;所述灌溉施肥主管道(7)的出口与果园灌溉管网相连接。
16.所述水肥参数检测装置检测灌溉施肥主管道(7)的总压力、总流量、营养液ec值及混肥罐(15)液面高度。
17.利用本实用新型装置的灌溉施肥方法包括以下步骤:
18.步骤一,进行灌溉工作时,根据土壤含水率等因素,计算灌水定额,提前设置所需累计灌溉量参数,当混肥罐(15)中的液位传感器(19)检测到液面高于最低水位时,离心泵(2)运行;控制系统(8)通过流量传感器(6)检测实际累计灌溉量与设定灌溉量比较,当达到设定灌溉量时,灌溉工作停止;
19.步骤二,需进行施肥工作时,根据果树类型和生长状况所需营养参数,设置不同的施肥配方、浓度和累计施肥量,经吸肥管路被文丘里吸肥器(1)吸出,经注肥口(21)流入至混肥罐(15);
20.步骤三,控制系统(8)通过ec传感器(4)对灌溉施肥主管道(7)中的营养液的ec值进行实时监测,并与所需施肥配方、浓度和施肥量设定值比较,根据实测值与设定值的差值动态调节吸肥电磁阀(3)的开关占空比以调节吸肥浓度保持稳定;流量传感器(6)检测灌溉施肥主管道的实时流量,当达到设定施肥量时,自动停止施肥。
21.本实用新型装置的工作过程如下。
22.首先,果园的灌溉水经进水主管道注入至混肥罐中,离心泵将混肥罐中的灌溉水进行抽取,一路经过灌溉施肥主管道流至果园管网;另一路从灌溉主管道分支口流出,经过精量吸肥装置的多路并联文丘里施肥器,文丘里施肥器喉部由于水流快速通过时截面积减小,流速急速增加而产生负压,将多个母液罐中的高浓度母液进行吸取,并经管道汇入至混
肥罐。营养液采用微灌方式持续的流至果树种植区域中。灌溉施肥作业过程中,主管道的流量传感器以及吸肥管路的ec传感器实时采集信号传至控制系统,通过内部程序优化计算,根据信号差值控制电磁阀一个周期内的脉冲宽度调节量,动态调整吸肥速度,直至达到稳定浓度状态。当达到设定的灌溉施肥量之后,控制系统与离心泵相连的交流接触器,关闭离心泵,停止灌溉施肥工作。当一个种植区域作业完成后,由拖拉机牵引至其他果树种植区域,继续进行灌溉施肥作业。
23.本实用新型具有有益效果。
24.本实用新型能够促进现有的果园种植区域实现水肥高效率利用。利用本实用新型,种植者根据作物营养与水分需求,可将多种肥料与灌溉水在移动式装置之上完成混合,并且可按照果树营养需求设定所需灌溉施肥量,实时动态调整灌溉施肥配方,保证输出的灌溉营养液浓度值稳定。本实用新型的多路精量吸肥通道可精确控制所需吸肥量,控制系统根据传感器的反馈值,精准控制灌溉施肥量与施肥浓度,保证果树生长所需的多种营养成分和水分。本实用新型通过移动式装置实现了灌溉施肥装置的方便灵活移动。本实用新型可解决传统果园灌溉施肥过程中劳动强度大、灌溉施肥控制精度低和水肥资源浪费严重等问题,提高果园生产效率。
附图说明
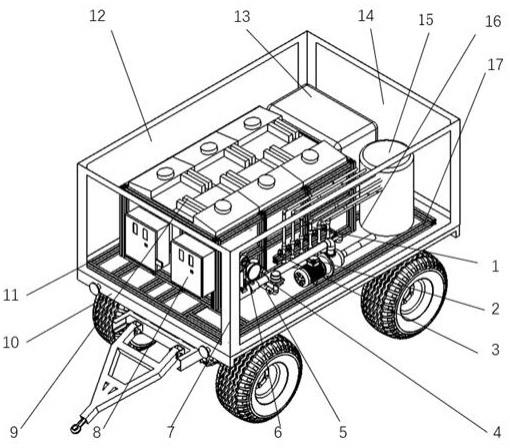
25.图1为本实用新型中多通道移动式果园灌溉施肥机的整体结构示意图。
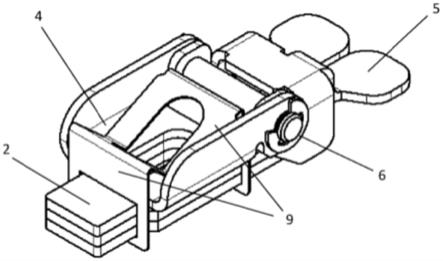
26.图2为本实用新型中吸肥装置结构示意图
27.图3为本实用新型中混肥装置结构示意图
28.图中:1.文丘里吸肥器,2.离心泵,3吸肥电磁阀,4.ec传感器,5.压力传感器,6.流量传感器,7.灌溉施肥主管道,8.控制系统,9.母液罐,10.四轮移动平台,11.透明观察窗,12.机罩,13.柴油发电机,14.操作门,15.混肥罐,16.进水主管道,17.过滤器,18.注水口,19.液位传感器,20.营养液出口,21.注肥口,22.浮球阀。
具体实施方式
29.下面结合具体实施例对本实用新型进行更加详细与完整的说明。本实用新型的描述中,一种多通道移动式的果园灌溉施肥机,主要结构如所示,适用于果园的灌溉与施肥工作,主要包括牵引式行走装置、混肥装置、精量吸肥装置、水肥参数检测装置、动力系统以及控制系统;具有可移动的工作特性,能够快速对接果园现有灌溉管网。实现按照配方动态调节,精准精量灌溉施肥功能,主要用于果园的水肥一体化管理,实现果园种植管理过程中精准灌溉和营养液精确调配。
30.其中,混肥装置包括依次连接的进水主管道16、注水口18、混肥罐15、离心泵2、灌溉施肥主管道7。精量吸肥装置如所示,包括通过管道依次连接的母液罐9、过滤器17、吸肥电磁阀3、文丘里吸肥器1,主要用于母液的吸取过程。精量吸肥装置包括通过管道并联多个吸肥通道,每个吸肥通道包括通过管道依次连接的母液罐9、过滤器17、吸肥电磁阀3、文丘里吸肥器1和注肥口21。按照需求,将各个母液罐9中,分别加入不同种类的母液。吸肥电磁阀3与控制系统8电连接,在实际使用过程中,控制系统8通过调节吸肥电磁阀3的脉冲占空比,实现对施肥浓度的动态调节。
31.水肥参数检测装置如所示,包括分别与控制系统8电连接的ec传感器4、液位传感器19、压力传感器5、流量传感器6,各类传感器用于检测灌溉施肥过程中的不同参数。控制系统8主要由plc控制器、各种断路保护装置、交流接触器、控制继电器、转换开关、熔断器、固态继电器和控制开关等组成,主要负责离心泵2、吸肥电磁阀3、灌溉施肥管路的运行和以及不同工作模式的切换。施肥机灌溉施肥工作的整体电力来源于车载柴油发电机13,其输出端与控制系统8的电源输入端电连接,并与离心泵2的电源输入端电连接,为控制系统8和离心泵2等执行机构供电。牵引式行走装置包括四轮移动平台10、机罩12通过固定元件固定连接于四轮移动平台上表面,机罩12四周均设置可开闭的操作门14,其中前后方向的操作门14为对向双开门,两侧的操作门14为单开门,连接于机罩12之上,便于添加肥料以及对混肥装置等部位进行设备维护工作。机罩12前部设置有透明观察窗11,通过观察窗,可以及时观察触摸显示屏显示的灌溉施肥参数信息,也可以打开观察窗,通过开关或触摸显示屏对控制系统8进行操作,控制灌溉与施肥进程。
32.混肥装置与精量吸肥装置通过固定元件固定于四轮移动平台10表面;混肥装置的混肥罐15设置有注水口18、多个注肥口21、营养液出口20;注水口18与多个注肥口21分别设置于混肥罐15罐壁上部两侧;营养液出口20设置于混肥罐15的罐壁底部,并与离心泵2的吸水口连接;混肥罐15内壁上部设置有浮球阀22,用于控制最高水位高度,避免液位过高,营养液溢出。混肥罐15内壁底部设置有液位传感器19,液位传感器19与控制系统8电连接,用于检测母液罐9的液面高度,避免液面高度过低造成离心泵2腔内不能正常注满液体而无法正常运行,导致灌溉施肥工作无法进行。
33.混肥装置的进水主管道16上部与注水口18相连接,下部与果园灌溉水源管道相连接。进行灌溉施肥工作时,外界水源通过进水主管道16经注水口18注入混肥罐15,经过精量吸肥配肥过程后,营养液经过灌溉施肥主管道7的出口流至灌溉管网,完成灌溉施肥工作。
34.水肥参数检测装置包括分别与控制系统8电连接的ec传感器4、液位传感器19、压力传感器5、流量传感器6,进行检测灌溉施肥主管道7的总压力、总流量、营养液ec值及混肥罐15液面高度等工作。流量传感器6监测整体管路的总流量,ec传感器4监测整体施肥浓度。流量传感器6用于检测灌溉施肥过程中的灌溉施肥流量,并反馈到plc控制器中,经过计算得到实际累计灌溉施肥量。
35.多通道移动式果园灌溉施肥机工作过程主要包括灌溉与施肥,其中,步骤包括:灌溉工作时,用户通过控制系统8的触摸显示屏设置灌溉量。先启动柴油发电机13,为控制系统8与整体执行装置供电。通过触摸显示屏设置所需要的累计灌溉量,果园水源为混肥罐15注水。当混肥罐15中的液位传感器19检测到水位达到最低水位时,离心泵2开始运行,将灌溉水注入果园灌溉管网。plc控制器通过制流量传感器6检测累计灌溉量与设定累计灌溉量进行比较,当达到设定累计灌溉量时,灌溉工作停止。
36.进一步,进行施肥工作时,用户根据果树类型和生长状况所需营养参数通过触摸显示屏设置不同的施肥配方、浓度和累计施肥量,通过控制系统8通过调节多个并联吸肥管路中的吸肥电磁阀3的占空比,吸肥管路进行动态吸肥工作,多种母液包括碳酰胺、过磷酸钙、硫酸钾、磷酸二铵、硫酸锌,分别经吸肥管路被文丘里吸肥器1吸出,通过注肥口21流入至混肥罐15。最终经灌溉施肥主管道7汇入到灌溉管网,吸肥速度通过控制系统8的进行精确控制。
37.控制系统的plc控制器通过ec传感器4对营养液的ec值进行实时监测,并与用户设置的施肥浓度进行比较,自动调节吸肥电磁阀3的开关占空比以调节吸肥速度。流量传感器6检测灌溉主管道的累计施肥量与提前设定的累计施肥量进行比较,当达到设定施肥量时,施肥工作停止。采用微灌方式。当一个果园种植区域灌溉施肥完成后,由拖拉机牵引施肥机至其他种植区域,继续完成灌溉施肥工作。
38.以上依据本实用新型的技术方案详细描述了具体实施方式。根据本实用新型的技术方案在不变更本实用新型的实质精神下,本领域的一般技术人员可以提出可相互替换的多种结构方式以及实现方式。因此,上文描述的具体实施方式以及附图仅是对本实用新型的技术方案的示例性说明,而不应当视为本实用新型的全部或者视为对本实用新型技术方案的限定或限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。