1.本发明涉及农业辅助技术领域,更具体地说,涉及一种能对野生动物进行及时驱离的方法。
背景技术:
2.在农作物生成过程中,常常会遭受鸟类、野鸡、野兽等动物偷吃或破坏,造成农作物损坏、产量降低等情况。古老的解决方式是在种植地里放置稻草人,防范动物进入侵扰;但由于稻草人静止不动,且形态与真人相差甚远,对动物的威吓程度有效,并不能很好地防范动物进入。
3.随着技术发展,也出现了一些现代化稻草人,加入电机,将传统稻草人的手臂做成上下摆动方式,或者增加一些会动作的结构,来提高威吓程度。这类装置通常对鸟类威吓比较有效,但对智商较鸟类高的野兽等动物则并不能显现出有效的威吓效果。因此,现亟待设计出一种既能对鸟类有效、又能对其它野生动物有效的驱离方法。
技术实现要素:
4.为克服现有技术中的缺点与不足,本发明的目的在于提供一种能对野生动物进行及时驱离的方法;该方法可对野生动物进行威吓驱赶,有效保护农作物种植区域,减少农作物损失,实现种植智能化管理,节省人力成本和减轻牧田人劳动强度。
5.为了达到上述目的,本发明通过下述技术方案予以实现:一种能对野生动物进行及时驱离的方法,其特征在于:在农作物种植区域里放置仿照猎人抱枪巡视形态的驱赶机器人,驱赶机器人间歇地作出转腰和抬枪动作以提升逼真度,实现对野生动物威吓,进而实现吓退野生动物的功能。
6.本发明方法,采用驱赶机器人模仿出猎人抱枪巡视的形态,具有十分高的逼真度,驱赶机器人可作出转腰和抬枪动作,且动作采用间隙式运作,避免动作长时间单一重复,更符合真人行为习惯,可进一步提高姿态和行为的逼真感,利用动物对猎人的恐惧心理对鸟类、野鸡、野猪等野生动物进行驱赶,有效保护农场、果园等农作物种植区域,减少农作物损失,实现种植智能化管理,可节省人力成本和减轻牧田人劳动强度。
7.优选地,所述驱赶机器人间歇地作出转腰和抬枪动作,是指:设定周期动作;周期动作包括转腰和抬枪动作;所述驱赶机器人采用定时模式、探测模式和定时探测混合模式中的任一种模式工作;
8.采用定时模式时,设定间隔时间;每间隔设定的间隔时间,驱赶机器人作出周期动作;
9.采用探测模式时,采用探测模块探测周围是否有移动物体;当探测到有移动物体时,驱赶机器人作出周期动作;
10.采用定时探测混合模式时,设定间隔时间;采用探测模块探测周围是否有移动物体;当探测到有移动物体时,驱赶机器人作出周期动作;当驱赶机器人不作周期动作的时间
达到设定的间隔时间后,驱赶机器人作出周期动作。
11.驱赶机器人具有多种工作模式,可符合不同场所的应用需求。
12.优选地,采用探测模式或定时探测混合模式时,当驱赶机器人完成一次周期动作后,关闭探测模块,待到达设定的待机时间后再开启探测模块。
13.该设计的好处是,使驱赶机器人的动作具有间歇性和突然性,避免野生动物对驱赶机器人长时间的重复动作产生免疫而降低威吓效果。
14.优选地,所述周期动作还包括发出照射强光和发出威吓声音。本发明还可利用声音和强光来驱赶野生动物,进一步提升驱赶效果。
15.优选地,所述周期动作包括一个以上动作循环单元;每个动作循环单元的流程如下:
16.首先发出照射强光并保持常亮;然后作出转腰动作;之后作出抬枪动作,同时发出或不发出威吓声音。该周期动作可逼真地模仿出猎人打猎的动作行为,对野生动物具有有效的威吓作用。
17.优选地,获取当前时刻;根据当前时刻设定周期动作里的发出威吓声音的音量;当采用定时模式或定时探测混合模式时,还根据当前时刻设定间隔时间。
18.获取当前时刻,区分出白天和黑夜;由于夜间野生动物出没几率较低,因此采用定时模式或定时探测混合模式时可设定白天和黑夜不同的间隔时间,在黑夜的启动频率降低,从而降低功耗;此外在黑夜中发出威吓声音会打扰周围居民休息,因此黑夜时将威吓声音关闭或降低音量,可避免扰民;满足白天和黑夜不同的驱赶要求。
19.优选地,所述驱赶机器人包括机器人本体;机器人本体包括头部、上躯干部、下身部和两个上肢部;头部、上躯干部、下身部和两个上肢部分别带有仿照人体形状的曲面;所述头部设置在上躯干部上;上躯干部通过腰部转动机构设置在下身部上,以实现上躯干部左右往复转动从而作出转腰动作;枪体承托在两个上肢部上;其中一个上肢部通过手臂摆动机构与上躯干部的一侧连接,以实现上肢部摆动从而作出抬枪动作;另一个上肢部与上躯干部的另一侧连接。该驱赶机器人可完成转腰和抬枪动作,动作逼真程度高。
20.优选地,所述手臂摆动机构包括摆动安装座、旋转驱动模块一、偏心件和拉线;其中一个上肢部与上躯干部之间通过转盘来实现可转动连接;所述旋转驱动模块一设置在摆动安装座上,偏心件与旋转驱动模块一的输出转动轴连接,偏心件与拉线连接,拉线与转盘连接,以实现旋转驱动模块一的输出转动轴带动偏心件从而使拉线拉动转盘转动。旋转驱动模块一的输出转动轴带动偏心件,使拉线拉动转盘转动,从而使该上肢部抬升一定角度,旋转驱动模块一反方向转动时,拉线放松,上肢部在自身重力作用下向下运动,因此上肢部可作出上下摆动动作。
21.优选地,两个上肢部均包括手臂和手掌;其中一个上肢部的手掌手心向上,另一个上肢部的手掌手心朝向上躯干部;枪体承托在两个手掌上,以呈现出抱枪姿态。
22.优选地,所述腰部转动机构包括转动座、旋转驱动模块二、旋转主轴、连接块一、连接块二和联动片;所述旋转驱动模块二设置在转动座上,旋转主轴可转动地设置在转动座上;旋转驱动模块二的输出转动轴与连接块一连接,连接块一与联动片铰接,联动片与连接块二铰接,连接块二与旋转主轴连接,旋转主轴与上躯干部连接,以实现旋转驱动模块二的输出转动轴顺时针或逆时针旋转时通过连接块一、联动片、连接块二和旋转主轴来带动上
躯干部左右往复转动。
23.旋转驱动模块二的输出转动轴在顺时针或逆时针旋转时,连接块一、联动片和连接块二联动,使旋转主轴往复转动一定角度;可通过连接块一、联动片和连接块二的不同长度配合,实现旋转主轴不同的往复转动角度;旋转驱动模块二单方向工作即可,不需要频繁切换方向,可简化控制流程,有利于节省能耗和延长使用寿命。
24.与现有技术相比,本发明具有如下优点与有益效果:
25.1、本发明方法采用驱赶机器人模仿出猎人抱枪巡视的形态,具有十分高的逼真度,驱赶机器人可作出转腰和抬枪动作,且动作采用间隙式运作,避免动作长时间单一重复,更符合真人行为习惯,可进一步提高姿态和行为的逼真感,利用动物对猎人的恐惧心理对鸟类、野鸡、野猪等野生动物进行驱赶,有效保护农场、果园等农作物种植区域,减少农作物损失,实现种植智能化管理,可节省人力成本和减轻牧田人劳动强度;
26.2、本发明方法具有多种工作模式,可符合不同场所的应用需求;
27.3、本发明方法,驱赶机器人的动作具有间歇性和突然性,避免野生动物对驱赶机器人长时间的重复动作产生免疫而降低威吓效果;
28.4、本发明方法区分出白天和黑夜进行不同设置,可满足白天和黑夜不同的驱赶要求。
附图说明
29.图1是本发明能对野生动物进行及时驱离的方法中驱赶机器人的结构示意图;
30.图2是本发明能对野生动物进行及时驱离的方法中驱赶机器人的爆炸图;
31.图3是本发明能对野生动物进行及时驱离的方法中驱赶机器人拆除下身部后的结构示意图;
32.图4是图3中a部放大图;
33.图5是本发明能对野生动物进行及时驱离的方法中,驱赶机器人的腰部转动机构的结构示意图;
34.图6是本发明能对野生动物进行及时驱离的方法中,驱赶机器人的手臂摆动机构的结构示意图;
35.图7是本发明能对野生动物进行及时驱离的方法中,驱赶机器人中手臂摆动机构与上肢部的连接示意图。
具体实施方式
36.下面结合附图与具体实施方式对本发明作进一步详细的描述。
37.实施例
38.本实施例一种能对野生动物进行及时驱离的方法,在农作物种植区域里放置仿照猎人抱枪巡视形态的驱赶机器人,驱赶机器人间歇地作出转腰和抬枪动作以提升逼真度,实现对野生动物威吓,进而实现吓退野生动物的功能。
39.驱赶机器人间歇地作出转腰和抬枪动作,是指:设定周期动作;周期动作包括转腰和抬枪动作;驱赶机器人采用定时模式、探测模式和定时探测混合模式中的任一种模式工作;
40.采用定时模式时,设定间隔时间;每间隔设定的间隔时间,驱赶机器人作出周期动作;
41.采用探测模式时,采用探测模块探测周围是否有移动物体;当探测到有移动物体时,驱赶机器人作出周期动作;
42.采用定时探测混合模式时,设定间隔时间;采用探测模块探测周围是否有移动物体;当探测到有移动物体时,驱赶机器人作出周期动作;当驱赶机器人不作周期动作的时间达到设定的间隔时间后,驱赶机器人作出周期动作。
43.本发明方法,采用驱赶机器人模仿出猎人抱枪巡视的形态,具有十分高的逼真度,驱赶机器人可作出转腰和抬枪动作,且动作采用间隙式运作,避免动作长时间单一重复,更符合真人行为习惯,可进一步提高姿态和行为的逼真感,利用动物对猎人的恐惧心理对鸟类、野鸡、野猪等野生动物进行驱赶,有效保护农场、果园等农作物种植区域,减少农作物损失,实现种植智能化管理,可节省人力成本和减轻牧田人劳动强度。驱赶机器人具有多种工作模式,可符合不同场所的应用需求。
44.采用探测模式或定时探测混合模式时,优选当驱赶机器人完成一次周期动作后,关闭探测模块,待到达设定的待机时间后再开启探测模块。该设计的好处是,使驱赶机器人的动作具有间歇性和突然性,避免野生动物对驱赶机器人长时间的重复动作产生免疫而降低威吓效果。
45.周期动作还包括发出照射强光和发出威吓声音。本发明还可利用声音和强光来驱赶野生动物,进一步提升驱赶效果。
46.具体地说,周期动作包括一个以上动作循环单元;每个动作循环单元的流程如下:
47.首先发出照射强光并保持常亮;然后作出转腰动作;之后作出抬枪动作,同时发出或不发出威吓声音。该周期动作可逼真地模仿出猎人打猎的动作行为,对野生动物具有有效的威吓作用。
48.获取当前时刻;根据当前时刻设定周期动作里的发出威吓声音的音量;当采用定时模式或定时探测混合模式时,还根据当前时刻设定间隔时间。
49.获取当前时刻,区分出白天和黑夜;由于夜间野生动物出没几率较低,因此采用定时模式或定时探测混合模式时可设定白天和黑夜不同的间隔时间,在黑夜的启动频率降低,从而降低功耗;此外在黑夜中发出威吓声音会打扰周围居民休息,因此黑夜时将威吓声音关闭或降低音量,可避免扰民;满足白天和黑夜不同的驱赶要求。获取当前时刻的方法可采用现有技术,例如在驱赶机器人中设置时间程序,驱赶机器人根据时间程序得到当前时间,从而判断当前时间为白天或黑夜;或者是采用感应环境光亮度的感光模块,通过环境光亮度来判断当前时间为白天或黑夜。
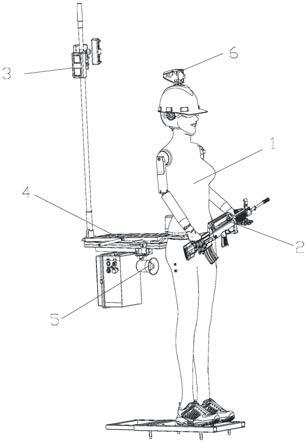
50.为实现上述方法,本发明采用的驱赶机器人包括:机器人本体1、探测模块3、枪体2、控制器和用于供电的供电模块4;机器人本体1包括头部11、上躯干部12、下身部14和两个上肢部13。
51.为实现逼真,优选的方案是:头部11、上躯干部12、下身部14和两个上肢部13优选分别带有仿照人体形状的曲面。机器人本体1的外部套设有衣物。
52.由于驱赶机器人用于户外,光线充足,因此供电模块4优选太阳能供电模块,太阳能供电模块可采用现有技术。
53.头部11设置在上躯干部12上;上躯干部12通过腰部转动机构7设置在下身部14上,以实现上躯干部12左右往复转动;其中一个上肢部13通过手臂摆动机构8与上躯干部12的一侧连接,以实现上肢部13摆动;另一个上肢部13与上躯干部12的另一侧连接;控制器分别与探测模块3、手臂摆动机构8和腰部转动机构7连接,以实现控制器接收探测模块3的检测信号,并控制手臂摆动机构8和腰部转动机构7工作;控制器可采用现有技术,例如单片机或plc等。
54.腰部转动机构7包括转动座、旋转驱动模块二71、旋转主轴75、连接块一72、连接块二74和联动片73;旋转驱动模块二71设置在转动座上,旋转主轴75可转动地设置在转动座上;旋转驱动模块二71的输出转动轴与连接块一72连接,连接块一72与联动片73铰接,联动片73与连接块二74铰接,连接块二74与旋转主轴75连接,旋转主轴75与上躯干部12连接。
55.旋转驱动模块二71的输出转动轴在顺时针或逆时针旋转时,连接块一72、联动片73和连接块二74联动,使旋转主轴75往复转动,从而使上躯干部12往复转动一定角度,模拟出人体转腰动作;可通过连接块一72、联动片73和连接块二74的不同长度配合,实现旋转主轴75不同的往复转动角度;旋转驱动模块二71单方向工作即可,不需要频繁切换方向,可简化控制流程,有利于节省能耗和延长使用寿命。
56.手臂摆动机构8包括摆动安装座、旋转驱动模块一81、偏心件82和拉线84;其中一个上肢部13与上躯干部12之间通过转盘83来实现可转动连接;旋转驱动模块一81设置在摆动安装座上,偏心件82与旋转驱动模块一81的输出转动轴连接,偏心件82与拉线84连接,拉线84与转盘83连接。
57.旋转驱动模块一81的输出转动轴带动偏心件82,使拉线84拉动转盘83转动,从而使该上肢部13抬升一定角度,旋转驱动模块一81反方向转动时,拉线84放松,上肢部13在自身重力作用下向下运动,因此上肢部13可作出上下摆动动作。
58.两个上肢部13均包括手臂和手掌;其中一个上肢部13的手掌手心向上,另一个上肢部13的手掌手心朝向上躯干部12;枪体2承托在两个手掌上,以呈现出抱枪姿态。
59.旋转驱动模块一和旋转驱动模块二可采用现有技术,例如电机。
60.为实现发出照射强光和发出威吓声音的优选方案,驱赶机器人优选还包括发声驱赶模块5和发光驱赶模块6;控制器还与发声驱赶模块5和发光驱赶模块6连接,以控制发声驱赶模块5和发光驱赶模块6工作。
61.为增加驱赶机器人的稳固性,优选方案是:可设置架体9,架体9固定在地面上,下身部14、供电模块4、探测模块3、发声驱赶模块5等可安装在架体9上。
62.上述实施例为本发明较佳的实施方式,但本发明的实施方式并不受上述实施例的限制,其他的任何未背离本发明的精神实质与原理下所作的改变、修饰、替代、组合、简化,均应为等效的置换方式,都包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。