1.本发明涉及水上救生和检测通信技术领域,特别是一种湖区智能救生系统的实现方法。
背景技术:
2.根据世界卫生组织《全球溺水报告》显示,全球每小时有40多人溺水死亡,每年共有约37,2万人溺水死亡。在我国每年也约有5.9万人死于溺水事故。夏季是溺水事故的高发季节,天气炎热前往湖区景点游玩的游客络绎不绝,保障游客生命安全成为重中之重。通过科学技术手段对传统水上安全设备进行改进,提高传统水上安全设备的实际应用能力,是有重大的研究意义的。
3.传统的水上安全设备可分为两大类,一类是救生衣,救生圈这种小型设备,另一类则是皮划艇,冲锋救援舟大型救生设备。前者存在机动性能差,往往会耽误救援时机。后者相对快捷,施救效率高,但是需要专门人员操控,无法普遍推广。
4.基于上述内容可得知,当面临突发落水事件时,往往难以第一时间提供高效的救援手段,面对复杂水域环境时,无法人工施救时,更是加大了救援难度。
技术实现要素:
5.有鉴于此,本发明的目的是提供一种能够智能操作,可用于复杂水面救援的湖区水面救生系统的实现方法。
6.本发明采用以下方法来实现:一种湖区智能救生系统的实现方法,其特征在于:所述湖区智能救生系统包括用于搜寻待救人员并获取待救人员位置的岸基子系统和用于救出待救人员的智能救生圈,所述岸基子系统包括设置在岸上的高清摄像头、雷达和工控机,所述雷达与所述高清摄像头电连接,所述高清摄像头与所述工控机电连接,所述工控机经无线通讯模块与2.4g通讯基站进行无线通信,且所述2.4g通讯基站与所述智能救生圈进行无线通信;
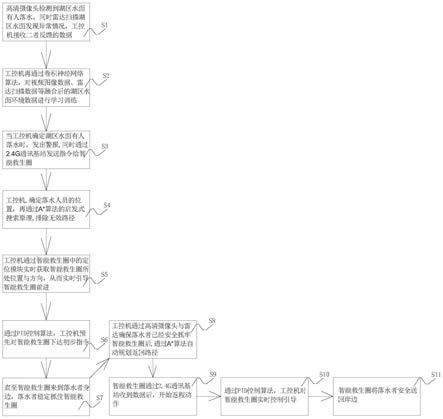
7.所述湖区智能救生系统的实现方法,包括以下步骤:
8.步骤s1、使用时,高清摄像头检测到湖区水面有人落水,同时雷达扫描湖区水面发现异常情况,工控机接收二者反馈的数据;
9.步骤s2、工控机再通过卷积神经网络算法,对视频图像数据、雷达扫描数据等融合后的湖区水面环境数据进行学习训练,以实际落水信息作为机器学习的目标值,不断对视频图像识别模型进行监督训练;
10.步骤s3、当工控机确定湖区水面有人落水时,发出警报,同时通过2.4g通讯基站发送指令给智能救生圈,使智能救生圈保持待命状态;
11.步骤s4、工控机结合高清摄像头图像内容和雷达扫描情况,确定落水人员的位置,同时检测湖区水面可航行区域,再通过a*算法的启发式搜索原理,将救生圈、落水者以及湖区水面障碍物设为网格,通过算法得出网格与网格之间的权值,来寻找最短有效路径,权值
最小的网格路径则为最短有效路径;
12.步骤s6、所述工控机通过智能救生圈中的定位模块实时获取智能救生圈所处位置与方向,从而实时引导智能救生圈前进;
13.步骤s7、通过pid控制算法,工控机预先对智能救生圈下达初步指令,由于水波影响智能救生圈无法完全实现指令动作,再根据智能救生圈的实际航行情况,比较与预先下发指令的差别,由pid控制算法得出调整参数,工控机再次下发指令让智能救生圈做出改变,从而确保智能救生圈沿着所述步骤s4中的最短有效路径行进;
14.步骤s8、直至智能救生圈来到落水者身边,落水者稳定抓住智能救生圈;
15.步骤s9、工控机通过高清摄像头与雷达确保落水者已经安全抓牢智能救生圈后,下一步根据智能救生圈所处位置与岸边最近的安全地点,通过a*算法自动规划返回路径,通过2.4g通讯基站将数据传输给智能救生圈;
16.步骤s10、智能救生圈通过2.4g通讯基站收到数据后,开始返程动作;
17.步骤s11、通过pid控制算法,工控机对智能救生圈实时控制引导,从而确保智能救生圈沿着工控机规划的返回路径返程;
18.步骤s12、智能救生圈将落水者安全送回岸边。
19.进一步的,所述智能救生圈内设置有主控模块,所述主控模块连接有驱动模块、定位模块和通信模块,所述mcu经通信模块与所述2.4g通讯基站进行数据通信。
20.进一步的,所述通信模块包括2.4g通讯芯片和天线,通过所述天线实现所述2.4g通讯芯片和所述2.4g通讯基站通信畅通,保障所述智能救生圈与所述工控机之间的信息传输。
21.进一步的,所述驱动模块包括推进器和供电电池,所述推进器由两组无刷电机组成,所述供电电池为所述推进器进行供电,所述推进器为所述智能救生圈提供动力。
22.进一步的,所述定位模块包括neo-m8n定位芯片和北微传感ah200电罗经,所述neo-m8n定位芯片能实时发送智能救生圈位置数据,所述北微传感ah200电罗经能确定所述智能救生圈的航向。
23.进一步的,所述步骤s4中的a*算法是一种典型的启发式搜索算法,采用最佳优先的启发式搜索算法,寻找一条从起点网格到终点网格的最短路径,a*算法在某一结点的估价函数可以表示为下列所示:
24.f(n)=g(n) h(n)
25.其中评估函数f(n)是从起始节点通过节点n的到达目标节点的最小代价路径的估计值,函数g(n)是从起始节点到n节点的已走过路径的实际代价,函数h(n)是从n节点到目标节点可能的最优路径的估计代价。
26.进一步的,所述步骤s2中的卷积神经网络算法采用了cnn中的yolov3算法,所述yolov3算法是通过感知平台采集积累图像样本,经过图像处理,图像标注构建实验数据集,训练深度学习网络并进行优化,以实现落水目标的实时检测;yolov3算法将落水者检测任务当作回归问题来处理,直接通过整张图片的所有像素得到目标边界框的坐标、框中包含物体的置信度和类概率;将输入图像划分为s*s的栅格,每个栅格负责检测中心落在该栅格中的物体,每一个栅格预测b个bounding boxes即目标边界框和置信度,这个置信度反映了模型对于这个网格的预测:该网格是否含有落水者,以及这个框的坐标预测的有多准。
27.本发明的有益效果在于:本发明加入了智能救生圈、高清摄像头、雷达、工控机和2.4g通讯基站,使得通过高清摄像头和雷达的作用,可将湖区湖面上的情况数据发送至工控机内,工控机可对是否有人员落水进行判别,再将数据经2.4g通讯基站传输至智能救生圈,并对智能救生圈进行路径引导,确保智能救生圈能够第一时间抵达救援地点,使救生圈自动前往落水事发现场,从而达到了系统救生的目的;无需营救人员下水进行施救,大大减小了次生灾害的发生;本发明可智能操作、便于推广,且可用于复杂水面救援。
附图说明
28.图1为本发明的方法流程示意图。
29.图2为所述pid控制算法的示意图。
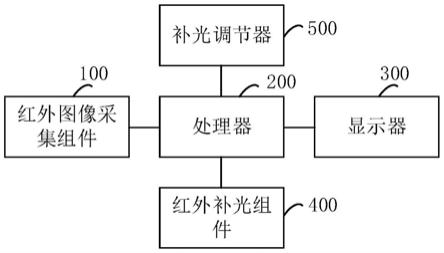
30.图3为所述智能救生圈的电路原理框图。
具体实施方式
31.下面结合附图对本发明做进一步说明。
32.请参阅图1所示,本发明提供了一实施例:一种湖区智能救生系统的实现方法,所述湖区智能救生系统包括用于搜寻待救人员并获取待救人员位置的岸基子系统和用于救出待救人员的智能救生圈,所述岸基子系统包括设置在岸上的高清摄像头、雷达和工控机,所述雷达与所述高清摄像头电连接,所述高清摄像头与所述工控机电连接,所述工控机经无线通讯模块与2.4g通讯基站进行无线通信,且所述2.4g通讯基站与所述智能救生圈进行无线通信;智能救生圈上的通讯部分通过2.4g通讯基站实现智能救生圈与工控机之间的数据传输;
33.所述湖区智能救生系统的实现方法,包括以下步骤:
34.步骤s1、使用时,高清摄像头检测到湖区水面有人落水,同时雷达扫描湖区水面发现异常情况,工控机接收二者反馈的数据;
35.步骤s2、工控机再通过卷积神经网络算法,对视频图像数据、雷达扫描数据等融合后的湖区水面环境数据进行学习训练,以实际落水信息作为机器学习的目标值,不断对视频图像识别模型进行监督训练;最终实现卷积神经网络算法对感知目标的准确识别,从而实现自动判别湖区水面是否有人员落水;
36.步骤s3、当工控机确定湖区水面有人落水时,发出警报,同时通过2.4g通讯基站发送指令给智能救生圈,使智能救生圈保持待命状态;
37.步骤s4、工控机结合高清摄像头图像内容和雷达扫描情况,确定落水人员的位置,同时检测湖区水面可航行区域,再通过a*算法的启发式搜索原理,将救生圈、落水者以及湖区水面障碍物设为网格,通过算法得出网格与网格之间的权值,来寻找最短有效路径,权值最小的网格路径则为最短有效路径;也就是再可航行区域内寻找到的最短救援路径,实现自动为智能救生圈规划好救援路线;
38.步骤s6、所述工控机通过智能救生圈中的定位模块实时获取智能救生圈所处位置与方向,从而实时引导智能救生圈前进;
39.步骤s7、通过pid控制算法,工控机预先对智能救生圈下达初步指令,由于水波影响智能救生圈无法完全实现指令动作,再根据智能救生圈的实际航行情况,比较与预先下
发指令的差别,由pid控制算法得出调整参数,工控机再次下发指令让智能救生圈做出改变,从而确保智能救生圈沿着所述步骤s4中的最短有效路径行进;
40.步骤s8、直至智能救生圈来到落水者身边,落水者稳定抓住智能救生圈;
41.步骤s9、工控机通过高清摄像头与雷达确保落水者已经安全抓牢智能救生圈后,下一步根据智能救生圈所处位置与岸边最近的安全地点,通过a*算法自动规划返回路径,通过2.4g通讯基站将数据传输给智能救生圈;
42.步骤s10、智能救生圈通过2.4g通讯基站收到数据后,开始返程动作;
43.步骤s11、通过pid控制算法,工控机对智能救生圈实时控制引导,从而确保智能救生圈沿着工控机规划的返回路径返程;
44.步骤s12、智能救生圈将落水者安全送回岸边。
45.本发明中的pid控制算法:pid是比例(proportion)、积分(integral)、微分(differential coefficient)的缩写,分别代表了三种控制算法,通过这三个算法的组合可有效地纠正被控制对象的偏差,从而使其达到一个稳定的状态,请参阅图2所示,图2中r(t):系统实际上需要的输出值,这是一个标准值,在我们设定了之后让这个系统去逼近的一个值;
46.y(t):系统当前的输出值,这个值应该需要趋近于我们设定的值,当我们没有增加pid控制模块之前,它是由被控对象通过r(t)输入直接产生的。
47.e(t):系统由于某些扰动,导致的系统产生的偏差,实际输出的值和想要设定的初始值r(t)的差值。
48.u(t):系统通过pid控制器输出的新的输入值,实际上他是在r(t)的基础上,针对当前的实际情况做出的改变。
49.kp比例模块:系统pid比例因子,kp能够对于产生的偏差e(t)能够迅速的作出反应,减少偏差。
50.ki积分模块:系统pid积分因子,ki能够用于消除静差,由于前面的误差有正有负,所以当前偏差的加入能够抵消部分,保持系统的稳定性,让系统有记忆功能。
51.kd微分模块:系统微分因子,kd能够体现出当前误差的变化趋势,引入有效早期修正信号,从而加快系统的动作速度,减少调节时间。
52.请参阅图3所示,本发明一实施例中,所述智能救生圈内设置有主控模块,所述主控模块连接有驱动模块、定位模块和通信模块,所述mcu经通信模块与所述2.4g通讯基站进行数据通信。所述主控模块由搭载stm32f407vgta芯片为主芯片的高性能电路板组成,经由通讯部分接收来自工控机的数据,主芯片接收数据后,下发操控指令,智能救生圈开始工作;同时工控机通过pid控制算法对智能救生圈进行路径引导,确保智能救生圈沿着规划路径前行。
53.所述通信模块包括2.4g通讯芯片和天线,通过所述天线实现所述2.4g通讯芯片和所述2.4g通讯基站通信畅通,保障所述智能救生圈与所述工控机之间的信息传输。
54.所述驱动模块包括推进器和供电电池,所述推进器由两组无刷电机组成,所述供电电池为所述推进器进行供电,所述推进器为所述智能救生圈提供动力。所述智能救生圈上搭载无线充电电池,由于无线充电电池自身重量小,大幅减轻救生圈重量,可提高载运能力,同时在岸端配有无线充电模块xkt801-60,方便智能救生圈随时靠泊充电。
55.所述定位模块包括neo-m8n定位芯片和北微传感ah200电罗经,所述neo-m8n定位芯片能实时发送智能救生圈位置数据,所述北微传感ah200电罗经能确定所述智能救生圈的航向。
56.本发明中的2.4g通讯芯片、主控模块、2.4g通讯基站、工控机、高清摄像头、雷达和推进器均为现有技术,本领域技术人员已经能够清楚了解,在此不进行详细说明。
57.所述步骤s4中的a*算法是一种典型的启发式搜索算法,采用最佳优先的启发式搜索算法,寻找一条从起点网格到终点网格的最短路径,a*算法在某一结点的估价函数可以表示为下列所示:
58.f(n)=g(n) h(n)
59.其中评估函数f(n)是从起始节点通过节点n的到达目标节点的最小代价路径的估计值,函数g(n)是从起始节点到n节点的已走过路径的实际代价,函数h(n)是从n节点到目标节点可能的最优路径的估计代价。函数h(n)表明了算法使用的启发信息,它来源于人们对路径规划问题的认识,依赖某种经验估计,根据f(n)可以计算出当前节点的代价,并可以对下一次能够到达的节点进行评估,采用每次搜索都找到代价值最小的点再继续往外搜索的过程,一步一步找到最优路径。
60.所述步骤s2中的卷积神经网络算法采用了cnn中的yolov3算法,所述yolov3算法是通过感知平台采集积累图像样本,经过图像处理,图像标注构建实验数据集,训练深度学习网络并进行优化,以实现落水目标的实时检测;yolov3算法将落水者检测任务当作回归问题来处理,直接通过整张图片的所有像素得到目标边界框的坐标、框中包含物体的置信度和类概率;将输入图像划分为s*s的栅格,每个栅格负责检测中心落在该栅格中的物体,每一个栅格预测b个bounding boxes即目标边界框和置信度,这个置信度反映了模型对于这个网格的预测:该网格是否含有落水者,以及这个框的坐标预测的有多准。
61.本发明中的供电系统分为三个部分,分别是雷达、摄像机部分;工控机部分;智能救生圈部分。
62.雷达、摄像机部分:统一线路,采用固伟开关电源模块psw80-27供电,提供12v直流电供电。
63.工控机部分:工控机放置在岸端,可直接采用市电交流电220v供电。
64.智能救生圈部分:智能救生圈搭载无线充电电池,采用无线充电模块xkt801-60进行充电,可安装在湖边靠泊位,智能救生圈可实时靠泊充电,充满电可运行1小时,电池电量告急可自行返回充电。
65.以上所述仅为本发明的较佳实施例,凡依本发明申请专利范围所做的均等变化与修饰,皆应属本发明的涵盖范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。