技术特征:
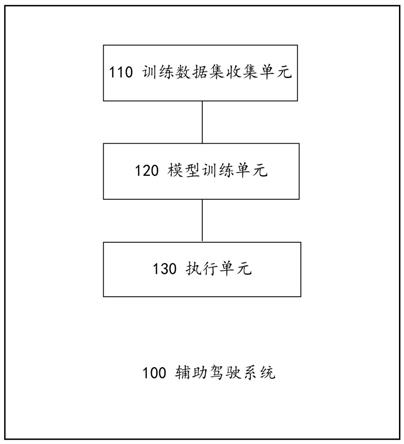
1.一种基于预测车辆切入临界水平的辅助驾驶系统,其特征在于,所述辅助驾驶系统包括:训练数据集收集单元,被配置用于收集参照车辆和切入车辆的参数和切入临界水平值;模型训练单元,被配置用于将所述参数和所述临界水平值作为深度神经网络的输入来训练模型;执行单元,被配置用于使用所述训练的模型进行辅助驾驶。2.根据权利要求1所述的辅助驾驶系统,其特征在于,所述参照车辆和切入车辆的参数包括,所述参照车辆的横向速度、纵向速度、横向加速度、纵向加速度、航向角、偏航角;所述切入车辆的横向速度、纵向速度、横向加速度、纵向加速度、航向角、偏航角;所述参照车辆和所述切入车辆的横向距离、纵向距离、所述参照车辆与所述切入车辆行驶通道的最近距离。3.根据权利要求2所述的辅助驾驶系统,其特征在于,所述参照车辆和切入车辆的参数通过设置在所述参照车辆上的或道路基础设施上的传感器获取。4.根据权利要求3所述的辅助驾驶系统,其特征在于,所述传感器为任一个或任意多个的组合:摄像装置、激光雷达、毫米波雷达、超声波传感器,优选摄像装置。5.根据权利要求1或2所述的辅助驾驶系统,其特征在于,所述执行单元包括将所述训练的模型发送至有需要的车辆。6.根据权利要求5所述的辅助驾驶系统,其特征在于,所述有需要的车辆基于其和目标车辆的参数和所述训练的模型,计算所述目标车辆的切入临界水平值。7.一种基于预测车辆切入临界水平的辅助驾驶方法,其特征在于,所述方法包括:(1)收集参照车辆和切入车辆的参数和切入临界水平值;(2)将所述参照车辆和切入车辆的参数和切入临界水平值作为深度神经网络的输入来训练模型;(3)使用所述训练的模型进行辅助驾驶。8.根据权利要求7所述的辅助驾驶方法,其特征在于,在(1)中,所述参照车辆和切入车辆的参数包括,所述参照车辆的横向速度、纵向速度、横向加速度、纵向加速度、航向角、偏航角;所述切入车辆的横向速度、纵向速度、横向加速度、纵向加速度、航向角、偏航角;所述参照车辆和所述切入车辆的横向距离、纵向距离、所述参照车辆与所述切入车辆行驶通道的最近距离。9.根据权利要求8所述的辅助驾驶方法,其特征在于,在(1)中,所述参照车辆和切入车辆的参数通过设置在所述参照车辆上的或道路基础设施上的传感器获取。10.根据权利要求9所述的辅助驾驶方法,其特征在于,所述传感器为任一个或任意多个的组合:摄像装置、激光雷达、毫米波雷达、超声波传感器,优选摄像装置。11.根据权利要求7或8所述的辅助驾驶方法,其特征在于,在(3)中包括将所述训练的模型发送至有需要的车辆。12.根据权利要求11所述的辅助驾驶方法,其特征在于,所述有需要的车辆基于其和目标车辆的参数和所述训练的模型,计算所述目标车辆的切入临界水平值。13.一种计算机可读存储介质,其特征在于,其上存储有计算机程序,所述计算机程序
在被处理器执行时实现根据权利要求7-12任一项的方法。
技术总结
本公开涉及基于预测车辆切入临界水平的辅助驾驶系统和方法。所述辅助驾驶系统包括:训练数据集收集单元,被配置用于收集参照车辆和切入车辆的参数和切入临界水平值;模型训练单元,被配置用于将所述参数和所述临界水平值作为深度神经网络的输入来训练模型;执行单元,被配置用于使用所述训练的模型进行辅助驾驶。根据本公开的辅助驾驶系统和方法可以通过收集参照车辆和切入车辆的参数和切入临界水平值,对深度神经网络模型进行训练,所述模型可以实现对车辆切入的临界水平进行预测。可以实现对车辆切入的临界水平进行预测。可以实现对车辆切入的临界水平进行预测。
技术研发人员:胡耘浩 戴冕 胡蕴华
受保护的技术使用者:奥迪股份公司
技术研发日:2020.06.15
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。