1.本发明涉及作业机,该作业机具有使空气流入外壳的内部的风扇和使外壳的内部的空气向外壳的外部排出的排气口。
背景技术:
2.专利文献1记载了一种作业机,该作业机具有使空气流入外壳的内部的风扇和使外壳的内部的空气向外壳的外部排出的排气口。作为专利文献1记载的作业机的往复运动工具,具有外壳、马达、风扇、推杆、驱动机构、刀片以及风扇。外壳具有外壳前部、外壳中央部及外壳后部。驱动机构及推杆容纳于外壳前部。马达及风扇容纳于外壳后部。驱动机构利用马达的旋转力驱动推杆。刀片由推杆支撑。
3.当利用马达的旋转力使推杆往复动作时,刀片切割被切割材。吸气口设于外壳前部,排气口设于外壳后部。当风扇通过马达的旋转力旋转时,冷却风从吸气口流入外壳内,驱动机构及马达被冷却。流入到外壳内的冷却风从排气口向外壳外排出。作业者可以将外壳中央部作为把手把持。
4.现有技术文献
5.专利文献
6.专利文献1:国际公开第2017/104380号
技术实现要素:
7.发明所要解决的课题
8.但是,本技术发明者认识到以下课题:当外壳的内部的空气朝向把手排出时,把手的温度上升,作业性降低。
9.本发明的目的在于提供可抑制外壳的内部的空气朝向把手排出的作业机。
10.用于解决课题的方案
11.一实施方式的作业机具有:容纳马达的外壳;通过上述马达旋转,且使上述外壳的外部的空气向上述外壳的内部流入的风扇;设于上述外壳,且供从上述外壳的内部向外部排出的空气通过的排气口;以及连接于上述外壳,且供作业者用手握住的把手,其中,该作业机具备导向部,该导向部抑制从上述排气口向上述外壳的外部排出的空气向接近上述把手的方向排出。
12.另一实施方式的作业机具有:容纳马达的外壳;通过上述马达旋转,且使上述外壳的外部的空气向上述外壳的内部流入的风扇;设于上述外壳,且供从上述外壳的内部向外部排出的空气通过的排气口;以及连接于上述外壳,且供作业者用手握住的把手,其中,在相对于上述马达的旋转中心线垂直的平面内,第一连接线与把手中心线之间的角度为70度以上,上述第一连接线穿过上述旋转中心线及最接近上述把手的上述排气口的端部,上述把手中心线沿上述把手从上述外壳突出的方向延伸,且穿过上述把手的宽度方向的中心。
13.发明的效果
14.根据一实施方式的作业机,可抑制外壳的内部的空气朝向把手排出。
附图说明
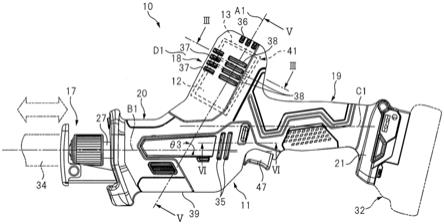
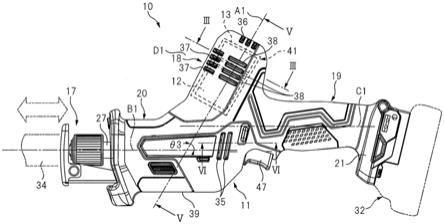
15.图1是表示本发明的一实施方式的刀锯是外观侧视图。
16.图2是图1的刀锯的侧视剖视图。
17.图3是将图1的刀锯沿iii-iii线破断的俯视剖视图。
18.图4a是放大图3的主要部分的俯视剖视图。
19.图4b是表示在相对于旋转中心线垂直的平面内可定义的工学上的角度及范围的示意图。
20.图5是将图1的刀锯沿v-v线破断的纵剖视图。
21.图6是将图1的刀锯沿vi-vi线破断的仰视图。
22.图7是放大图5的主要部分的纵剖视图。
23.图8是放大图1的主要部分的外观侧视图。
24.图9是表示本发明的一实施方式的冲击式螺钉旋具的外观图。
25.图中:
26.10—刀锯,12—电动马达,13—风扇,17—工具支撑部,18—马达外壳,19—把手,35—第一吸气口,36—第二吸气口,37、38—排气口,44—导向部,47—触发器,a1—旋转中心线,c1—把手中心线,g1—第一连接线,g2—第二连接线,θ1—第1角度,θ2—第2角度。
具体实施方式
27.以下,参照附图对本发明的作业机包括的几个实施方式进行说明。
28.图1、图2以及图3中示出了作为作业机的刀锯10。刀锯10可以切割对象物。刀锯10具有主体部11、电动马达12、风扇13、控制电路14、动力传递机构15、运动转换机构16以及工具支撑部17。主体部11是容纳及支撑机构及部件的外壳。主体部11的至少一部分为合成树脂,主体部11具有马达外壳18、把手19、辅助把持部20以及装配部21。马达外壳18是筒形状,辅助把持部20及把手19连接于马达外壳18。
29.壳体41设于马达外壳18的内部d2。壳体41具有通气孔42。电动马达12设于壳体41的内部。如图5所示,电动马达12具有转子22及定子23。电动马达12例如是直流无刷马达。定子23具有对应于3相、也就是u相、v相、w相的电线。转子22安装于旋转轴24。旋转轴24由轴承25可旋转地支撑。旋转中心线a1是表示旋转轴24的旋转中心的假想线。
30.工具支撑部17由辅助把持部20可以以直线状往复动作地支撑,且具有保持件26及推杆27。保持件26固定于推杆27,刀片、也就是锯刀34可相对于保持件26安装及拆卸。动作中心线b1位于推杆27的中心,且为表示工具支撑部17的动作方向的假想线。在包括旋转中心线a1及动作中心线b1双方的图1及图2中,旋转中心线a1和动作中心线b1交叉配置。在图3的以旋转中心线a1为中心的假想圆的径向上,把手19从马达外壳18在马达外壳18的径向上突出。也就是,把手19如图3那样在相对于旋转中心线a1垂直的平面内沿与旋转中心线a1交叉的方向突出。
31.辅助把持部20及把手19从马达外壳18的外表面沿马达外壳18的径向突出、也就是延伸。另外,辅助把持部20从马达外壳18突出的方向和把手19从马达外壳18突出的方向相
反。把手19及辅助把持部20是供作业者用手握住的部位。
32.在图1及图2中,旋转中心线a1和把手中心线c1交叉配置。在马达外壳18与把手19之间,旋转中心线a1和把手中心线c1以不足90度的角度θ3交叉。如图3所示,把手中心线c1是在相对于旋转中心线a1垂直的平面内穿过把手19的宽度方向的中心且与旋转中心线a1重合的假想线。另外,在图1及图2中,把手中心线c1和动作中心线b1平行地配置。进一步地,在图3中,动作中心线b1位于把手中心线c1的延长上。图2中,把手中心线c1在沿旋转中心线a1的方向上位于电动马达12与动作中心线b1之间。
33.动力传递机构15设于辅助把持部20的内部。动力传递机构15将旋转轴24的旋转力传递至运动转换机构16。动力传递机构15具有小齿轮28及斜齿轮29。小齿轮28固定于旋转轴24。斜齿轮29与小齿轮28啮合,旋转轴24的旋转力经由小齿轮28传递至斜齿轮29。运动转换机构16设于辅助把持部20内。运动转换机构16是将斜齿轮29的旋转力转换成工具支撑部17的往复动作力的机构。
34.触发器47及触发器开关30设于把手19。触发器47在沿把手中心线c1的方向上设于最靠近辅助把持部20的部位。作业者可以用手握住把手19,而且用手指对触发器47附加及解除操作力。当对触发器47附加操作力时,触发器开关30接通,且当附加于触发器47的操作力解除时,触发器开关30断开。
35.控制电路14设于主体部11的内部,例如,设于装配部21的内部。控制电路14是具备输入接口、输出接口、中央运算处理装置的微型计算机。另外,在壳体41的内部设有倒相电路31。倒相电路31是为了连接及切断连接于电动马达12的定子23的电路而设置的。倒相电路31具备控制基板和设于控制基板的多个开关元件,多个开关元件分别可以单独地接通及断开。触发器开关30的信号输入控制电路14,控制电路14控制倒相电路31。
36.装配部21构成为可安装及卸下电池盒32。在装配部21设有导轨,当作业者使电池盒32沿导轨移动,可以将电池盒32安装于装配部21,以及将电池盒32从装配部21卸下。在装配部21设有第一端子。第一端子是导电部件,电连接于倒相电路31。电池盒32具有容纳壳体和容纳于容纳壳体内的多个电池单元。容纳壳体具有作为导电部件的第二端子,当电池盒32安装于装配部21,第一端子和第二端子电连接。电池单元是直流电源的一例,具体而言,是可充电及放电的二次电池。电池单元能够使用锂离子电池、镍氢电池、锂离子聚合物电池、镍镉电池的任一种。
37.当作业者解除对触发器47的操作力,控制电路14使电动马达12停止。当作业者用第一手握住把手19,且对触发器47施加操作力时,触发器开关30接通。控制电路14当触发器开关30接通时对倒相电路31进行控制,由此将电池盒32的电压施加给电动马达12。电动马达12的旋转轴24的旋转力经由动力传递机构15传递至运动转换机构16。运动转换机构16使工具支撑部17往复动作。锯刀34与工具支撑部17一起往复动作。当作业者用第二手握住辅助把持部且向对象物按压锯刀34时,锯刀34切割对象物。对象物例如为木材。控制电路14基于触发器开关30的接通及断开切换电动马达12的旋转和停止。
38.电动马达12及倒相电路31由于通电而温度上升。刀锯10具有用于冷却电动马达12及倒相电路31的风扇13。风扇13设于壳体41的内部。风扇13形成使马达外壳18的外部d1的空气向马达外壳18的内部d2流入,且使内部d2的空气流向外部d1的气流。
39.风扇13例如为离心风扇,风扇13安装于旋转轴24。在沿旋转中心线a1的方向上,电
动马达12配置于风扇13与把手中心线c1之间。在沿旋转中心线a1的方向上,倒相电路31配置于风扇13与电动马达12之间。当旋转轴24旋转,风扇13以旋转中心线a1为中心旋转。旋转中心线a1在电动马达12及风扇13中是共通的。
40.第一吸气口35、第二吸气口36以及排气口37、38设于主体部11。如图3及图4a所示,设有连接辅助把持部20和把手19的倾斜壁43。倾斜壁43隔着把手中心线c1设有两个。两个倾斜壁43隔着把手中心线c1具有线对称的形状。两个倾斜壁43分别设置为相对于把手中心线c1倾斜。如图6所示,以倾斜壁43的厚度方向的中心线e1与把手中心线c1之间的距离随着靠近把手19而缩短的方式,倾斜壁43相对于把手中心线c1倾斜。在两个倾斜壁43分别设有第一吸气口35。第一吸气口35将内部d2和外部d1相连。第一吸气口35可以是将倾斜壁43在厚度方向上贯通的孔、通路、狭缝的任一个。第一吸气口35朝向把手19开口。
41.第一吸气口35设于马达外壳18中的在沿动作中心线b1的方向上旋转中心线a1与触发器47之间。另外,动作中心线b1和第一吸气口35重叠。进一步地,在辅助把持部20中的在沿旋转中心线a1的方向上相距马达外壳18最远的外缘39与把手中心线c1之间设有第一吸气口35。外缘39和动作中心线b1平行。
42.马达外壳18在沿旋转中心线a1的方向上相距把手中心线c1最远的部位具有壁部45。第二吸气口36设于马达外壳18。第二吸气口36的一部分贯通壁部45。第二吸气口36朝向把手19开口。第二吸气口36将外部d1和内部d2相连。
43.排气口37、38设置为将马达外壳18在厚度方向上贯通。排气口37、38分别就将外部d1和内部d2相连。排气口37、38供从内部d2向外部d1排出的空气穿过。排气口37、38均可以是孔、通路、狭缝的任一个。排气口37隔着把手中心线c1设有两个,排气口38隔着把手中心线c1设有两个。两个排气口38在沿把手中心线c1的方向上设于排气口37与把手19之间。两个排气口37及两个排气口38在以旋转中心线a1为中心的风扇13的旋转方向上隔开间隔地配置。
44.若将相对于把手中心线c1以90度的角度交叉的直线设为假想线f1,则假想线f1在沿把手中心线c1的方向上位于两个排气口38的中央。另外,如图4a所示,在相对于旋转中心线a1垂直的平面内,端部38a设于旋转中心线a1与把手19之间。端部38a是排气口38中的在沿把手中心线c1的方向上最接近把手19的排气口38的开口端。而且,排气口37在沿旋转中心线a1的方向上隔开间隔设有多个。进一步地,排气口38在沿旋转中心线a1的方向上隔开间隔设有多个。此外,在沿旋转中心线a1的方向上,排气口37、38的配置范围设于把手19与壁部45之间。
45.如图4a所示,在相对于旋转中心线a1垂直的平面内,穿过旋转中心线a1及排气口38中的最接近把手19的端部38a的第一连接线g1与把手中心线c1之间的第一角度θ1为70度以上且90度以下。马达外壳18具有设于排气口38与排气口38之间的壁部40。壁部40设置为以旋转中心线a1为中心遍及140度以上的范围。设有壁部40的范围相当于第一角度θ1的两倍。壁部40在沿把手中心线c1的方向上隔开马达外壳18的内部d2和把手19。如图4a所示,在相对于旋转中心线a1垂直的平面内,穿过风扇13的径向的外端及端部38a的第二连接线g2与把手中心线c1之间的锐角侧的第二角度θ2为30度以上。
46.马达外壳18具有设于排气口38与排气口38之间的壁部40。如图4b所示,壁部40设置为以旋转中心线a1为中心遍及140度以上的范围r1。设有壁部40的范围r1相当于第一角
度θ1的两倍。壁部40在沿把手中心线c1的方向上将马达外壳18的内部d2和把手19隔开。进一步地,在以旋转中心线a1为中心的平面内,设有排气口37、38的范围r2处于设有把手19的范围r3之外。另外,范围r3全部位于范围r1内,而且比范围r1窄。范围r1、r2、r3均相当于以旋转中心线a1为中心的角度。
47.如图7所示,马达外壳18具有导向部44。导向部44例如与马达外壳18一体。导向部44与排气口37、38分别对应地设置。在此,主要说明排气口38与导向部44的关系。导向部44朝向旋转中心线a1延伸。也就是,导向部44从马达外壳18的内面18a以接近旋转中心线a1的方式突出。导向部44设于内部d2。导向部4从各个排气口38的开口端中的在沿旋转中心线a1的方向上相距壁部45最远的部位朝向壁部45延伸。另外,导向部44相对于旋转中心线a1分别倾斜地设置。也就是,导向部44在接近壁部45的朝向上,相对于旋转中心线a1分别倾斜。进一步地,导向部44从内部d2分别覆盖排气口38的一部分。
48.并且,当风扇13与旋转轴24一起旋转时,外部d1的空气穿过第一吸气口35及第二吸气口36向内部d2流入。电动马达12及倒相电路31的热被传递到空气。流到内部d2的空气从排气口37、38向外部d1排出。这样,在内部d2中,通过强制对流冷却电动马达12及倒相电路31。
49.如图8所示,导向部44决定从排气口37、38向外部d1排出的空气的流向h1。方向h1是抑制从排气口37、38排出的空气靠近把手中心线c1且接近把手19的方向。也就是,能够使朝向把手19流动的空气的移动成分减少。从而,能够抑制作业者用手46握住的把手19的温度上升,能够抑制作业性的降低。
50.此外,从排气口37、38排出的空气的朝向由风扇13的旋转方向决定。例如,在本实施方式的图4a中,风扇13绕顺时针旋转。因此,容易接近把手19的空气是从位于比排气口37靠右侧的排气口38排出的空气。图8中可以观察到排气口37,当然,在排气口37也同样地起到抑制排出的空气接近把手19的效果。
51.另外,如图4a那样,在相对于旋转中心线a1垂直的平面内,第一连接线g1与把手中心线c1之间的第一角度θ1为70度以上。从而,从排气口37、38排出的空气被壁部40遮挡,可抑制接近把手19。另外,能够使排气口37、38的开口面积尽量扩大。
52.进一步地,如图4a那样,在相对于旋转中心线a1垂直的平面内,第二连接线g2与把手中心线c1之间的锐角侧的第二角度θ2为30度以上。从而,从排气口38排出的空气被壁部40遮挡,能够可靠地抑制空气流向把手19。
53.另外,从排气口37、38向外部d1排出的空气的流向h1由导向部44的表面形状、导向部44相对于旋转中心线a1的倾斜的朝向及倾斜角度决定。从而,导向部44可以以使空气在方向h1上流动的方式顺滑地导向。
54.另外,图1那样,在马达外壳18与把手19之间,旋转中心线a1与把手中心线c1所成的角度θ3不足90度。而且,排气口37、38设置成在以旋转中心线a1为中心的径向上贯通马达外壳18。从而,能够可靠地减少流向把手19的空气的移动成分。
55.进一步地,工具支撑部17以与把手19从马达外壳18突出的方向相反的朝向延伸,第一吸气口35及第二吸气口36朝向把手19开口。从而,能够抑制在锯刀34切割对象物的过程中产生的粉尘从第一吸气口35及第二吸气口36向内部d2吸入。
56.进一步地,导向部44在内部d2分别覆盖排气口37、38的一部分。从而,能够抑制外
部d1的异物从排气口37、38向内部d2侵入。
57.图9表示另一实施方式。图9示出了冲击式螺钉旋具110。冲击式螺钉旋具110具有马达外壳120和连接于马达外壳120的把手119。在马达外壳120内设有未图示的马达。触发器147设于把手119。当对触发器147附加操作力时,马达旋转,当对触发器147的操作力解除时,马达停止。吸气口135及排气口138设于马达外壳120。在冲击式螺钉旋具110中,在排气口138的部分设有与刀锯10同样的导向部。构成为,从排气口138向马达外壳120的外部排出的空气难以接近把手119。因此,本实施方式的作业机也可以应用于刀锯以外的作业机。
58.实施方式公开的事项的技术性意味的一例如下。刀锯10为作业机的一例。电动马达12为马达的一例。马达外壳18为外壳的一例。风扇13为风扇的一例。排气口37、38分别为排气口的一例。把手19为把手的一例。导向部44为导向部的一例。旋转中心线a1为旋转中心线的一例。触发器47为操作部材的一例。工具支撑部17为工具支撑部的一例。第一吸气口35及第二吸气口36分别为吸气口的一例。第一连接线g1为第一连接线的一例。第二连接线g2为第二连接线的一例。把手中心线c1为把手中心线的一例。第一角度θ1为第一角度的一例。第二角度θ2为第二角度的一例。锯刀34为前端工具的一例。
59.作业机不限于本实施方式,在不脱离其宗旨的范围内可以进行各种变更。例如,对电动马达施加电压的电源可以是直流电源和交流电源的任一个。工具支撑部包括推杆、保持件、夹头、砧座、匣子、扩展件等。把手包括扶手。导向部限制空气排出的方向,导向部包括壁部、肋、突起等。导向部可以与外壳一体或分体。导向部可以设于外壳的外表面。操作部件包括触发器、杆、按钮等。作业机除了使工具支撑部往复动作,还包括使工具支撑部旋转。例如,作业机为电钻、电螺钉旋具、电锤等。
60.以下的第一至第八作业机也在本实施方式中分别进行了公开。
61.第一作业机具有:容纳马达的外壳;通过上述马达旋转且使上述外壳的外部的空气向上述外壳的内部流入的风扇;设于上述外壳且使在上述外壳的内部流动的空气排出至上述外壳的外部排出的排气口;以及连接于上述外壳且供作业者用手握住的把手,该作业机中,在相对于上述马达的旋转中心线垂直的平面内,连结上述旋转中心线和上述排气口中的最接近上述把手的部位的第一连接线与位于上述把手的宽度方向的中心的把手中心线之间的角度为70度以上,上述马达及上述风扇设为可以以共通的旋转中心线为中心旋转,上述把手从上述外壳沿相对于上述旋转中心线交叉的方向突出,上述排气口设为沿上述交叉的方向贯通上述外壳。
62.第二作业机在第一作业机的结构的基础上,导向部朝向旋转中心线延伸,且相对于旋转中心线倾斜地设置。
63.第三作业机在第二作业机的结构的基础上,导向部在外壳的内部覆盖排气口的一部分。
64.第四作业机在第三作业机的结构的基础上,在把手设有为了切换马达的旋转及停止而被作业者操作的操作部材。
65.第五作业机在第一至第四中任一个作业机的结构的基础上,还设有:通过马达的旋转力动作且可安装及卸下前端工具的工具支撑部;以及将通过风扇的旋转而流动的空气从外壳的外部引导至外壳的内部的吸气口,工具支撑部向与把手从外壳突出的方向相反的朝向延伸,吸气口朝向把手开口。
66.第六作业机在第一至第五中任一个作业机的结构的基础上,在相对于马达的旋转中心线垂直的平面内,连结风扇的外周端和排气口中的最接近把手的部位的第二连接线与位于把手的宽度方向的中心的把手中心线之间的锐角侧的第二角度为30度以上。
67.第七作业机具有:容纳马达的外壳;通过上述马达旋转且使上述外壳的外部的空气向上述外壳的内部流入的风扇;设于上述外壳且使上述外壳的内部的空气排出至上述外壳的外部的排气口;以及连接于上述外壳且供作业者用手握住的把手,该作业机中,在相对于上述马达的旋转中心线垂直的平面内,以上述旋转中心线为中心设有上述排气口的范围处于以上述旋转中心线为中心设有上述把手的范围外。
68.第八作业机在第七作业机的结构的基础上,具备抑制从排气口排出至外壳的外部的空气向接近把手的方向排出的导向部。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。