技术特征:
1.一种加速器射野几何与透视成像几何耦合校准装置,其特征在于,所述装置包括透明材料制成的基体和嵌在基体内部的若干金属球,所述金属球直径相同,任意四个球体不共面,其中一个金属球的球心位于基体的几何中心。2.根据权利要求1所述的一种加速器射野几何与透视成像几何耦合校准装置,其特征在于,所述基体表面设有两组标记线,每组标记线包括一条竖直标记线和一条水平标记线,通过两组标记线中心点的两组水平面与竖直面交于基体的几何中心,通过两组标记线的水平面与竖直面的两条交线相互垂直。3.根据权利要求1所述的一种加速器射野几何与透视成像几何耦合校准装置,其特征在于,所述基体由有机玻璃制成。4.根据权利要求1所述的一种加速器射野几何与透视成像几何耦合校准装置,其特征在于,所述基体下端面为平面。5.根据权利要求2所述的一种加速器射野几何与透视成像几何耦合校准装置,其特征在于,所述金属球直径为3
‑
10mm,所述金属球数量至少为用于进行校准的透视成像装置的数量的八倍。6.使用权利要求1
‑
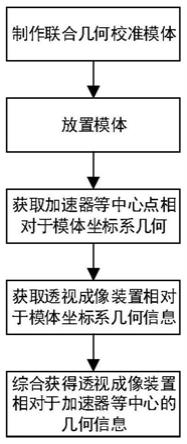
5任一所述的加速器射野几何与透视成像几何耦合校准装置的校准方法,其特征在于,所述方法包括如下步骤:(1)将校准装置放于平台上,调整其位置确保校准装置同时处于加速器射野范围和透视成像装置成像范围内;(2)旋转加速器机头,获得多于2个角度的加速器射野影像,根据这些影像中金属球在画面中的位置于金属球在模体坐标系下的坐标,获得加速器成像的几何信息;(3)填充射野影像中金属投影区域并卷积获得射野中心投影坐标,并根据该角度的射野成像装置几何信息计算得射野该角度的三维射野中心射线;由多个角度的射野中心射线拟合得到其三维交点,即模体坐标系下的射野等中心点;(4)不移动模体,启动透视成像装置,获得透视影像,从透视影像中获得金属球二维投影坐标,与金属球三维坐标联立方程计算获得透视成像装置在模体坐标系下的几何投影矩阵表示的几何信息,矩阵为3x4的形式,联立方程如下:其中p
ij
指投影矩阵第i行第j列的元素的值,(x
i
,y
i
,z
i
)指第i个金属球的三维坐标,(u
i
,v
i
,w
i
)为三维坐标的二维投影加权坐标,对应的二维投影坐标计算方法为:(5)根据步骤(3)获得的模体坐标系下的加速器射野中心点坐标形成模体坐标系原点到加速器中心点的平移向量(
‑
x0,
‑
y0,
‑
z0),代入步骤(4)获得的模体坐标系下的几何投影矩阵,最终通过下式形成最终的耦合加速器坐标系下的几何投影矩阵p:。7.根据权利要求7所述的加速器射野几何与透视成像几何耦合校准方法,其特征在于,
所述模体坐标系按如下原则形成:以通过第一组标记线的水平面与竖直面交线为x轴,通过第二组标记线的水平面与竖直面的交线为y轴,根据右手定则由x轴和y轴形成z轴,以模体几何中心为坐标原点;记录模体坐标系下各个金属球的位置。8.根据权利要求7所述的加速器射野几何与透视成像几何耦合校准方法,其特征在于,所述步骤(2)中的几何信息包括加速器机头、射野成像平板的坐标和角度。
技术总结
本发明公开了一种加速器射野几何与透视成像几何耦合校准装置,包括透明材料制成的基体和嵌在基体内部的金属球;任意四个球体不共面,且一个金属球球心位于基体的几何中心;基体表面设有两组标记线。本发明还公开一种基于上述装置的加速器射野几何与透视成像几何耦合校准方法,将校准装置置于加速器射野范围和透视成像装置成像范围内,根据不同角度的影像中金属球在画面中的位置,加速器射野中心点和透视成像装置的几何信息获得透视成像装置相对于加速器射野中心点的耦合几何信息,本发明可实时获得相对于加速器射野的透视装置几何参数,避免了基于激光灯模体摆位的误差传递,提升了用于加速器图像引导的透视装置的几何精度,整体校正效率高。整体校正效率高。整体校正效率高。
技术研发人员:ꢀ(74)专利代理机构
受保护的技术使用者:中科超精(南京)科技有限公司
技术研发日:2021.08.17
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。