技术特征:
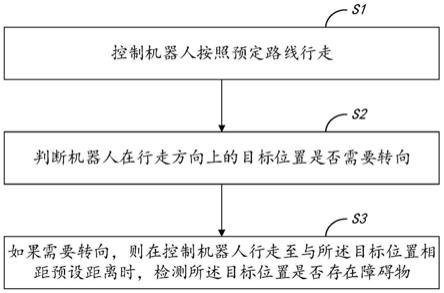
1.一种机器人行走控制方法,其特征在于,所述方法包括:控制机器人按照预定路线行走;判断机器人在行走方向上的目标位置是否需要转向;如果需要转向,则在控制机器人行走至与所述目标位置相距预设距离时,检测所述目标位置是否存在障碍物。2.根据权利要求1所述的机器人行走控制方法,其特征在于,所述方法还包括:如果所述目标位置存在障碍物,则控制所述机器人在当前位置转向以避开所述障碍物;如果所述目标位置不存在障碍物,则控制所述机器人行走至所述目标位置时转向。3.根据权利要求1所述的机器人行走控制方法,其特征在于,所述判断机器人在行走方向上的目标位置是否需要转向,包括:获取原始图像;将所述原始图像转换为二值化图像,所述二值化图像包括具有第一像素值的工作区域和具有第二像素值的非工作区域;以所述二值化图像为基础,获取围合所述工作区域、且为最小的第一矩形轮廓,以及围合所述非工作区域、且为最小的第二矩形轮廓;根据所述第一矩形轮廓和所述第二矩形轮廓,判断所述机器人在所述目标位置是否需要转向。4.根据权利要求3所述的机器人行走控制方法,其特征在于,所述在控制机器人行走至与所述目标位置相距预设距离时,检测所述目标位置是否存在障碍物,包括:获取所述机器人当前位置与所述目标位置的距离;判断所述机器人当前位置与所述目标位置的距离是否达到所述预设距离;如果达到所述预设距离,则检测所述目标位置是否存在障碍物。5.根据权利要求4所述的机器人行走控制方法,其特征在于,所述获取所述机器人当前位置与所述目标位置的距离,包括:根据所述第一矩形轮廓和所述第二矩形轮廓获取所述机器人当前位置与所述目标位置的距离在所述原始图像上的映射距离,以所述映射距离作为所述机器人当前位置与所述目标位置的距离。6.根据权利要求5所述的机器人行走控制方法,其特征在于,所述根据所述第一矩形轮廓和所述第二矩形轮廓获取所述机器人当前位置与所述目标位置的距离在所述原始图像上的映射距离,包括:获取第一矩形轮廓的宽度、所述第一矩形轮廓的左上角在所述原始图像或所述二值化图像上的相对纵坐标值,第二矩形轮廓的宽度、所述第二矩形轮廓的左上角在原始图像或所述二值化图像上的相对的纵坐标值;若第一矩形轮廓的宽度等于所述原始图像或所述二值化图像的宽度,则在所述第二矩形轮廓的宽度小于原始图像或所述二值化图像的宽度的情况下,将所述原始图像或所述二值化图像的最大纵坐标值与所述第二矩形轮廓的左上角在原始图像或所述二值化图像上的相对的纵坐标值的差值赋值给映射长度;若第一矩形轮廓的宽度小于所述原始图像或所述二值化图像的宽度,则在所述第一矩
形轮廓的左上角在所述原始图像或所述二值化图像上的相对纵坐标值不为0的情况下,则将所述原始图像或所述二值化图像的最大纵坐标值与所述第一矩形轮廓的左上角在所述原始图像或所述二值化图像上的相对纵坐标值的差值赋值给映射长度。7.根据权利要求1-6任一项所述的机器人行走控制方法,其特征在于,所述检测所述目标位置是否存在障碍物,包括:通过测距装置朝向所述目标位置发射检测信号;若所述测距装置接收到回复信号,则判定所述目标位置存在障碍物;若所述测距装置未接收到回复信号,则判定所述目标位置不存在障碍物。8.一种机器人行走控制系统,其特征在于,所述系统包括:驱动模块,所述驱动模块用于控制所述机器人按照预定路线行走;解析模块,所述解析模块用于判断所述机器人在行走方向上的目标位置是否需要转向,如果需要转向,在控制机器人行走至与所述目标位置相距预设距离时,检测所述目标位置是否存在障碍物。9.一种机器人,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1-7中任一项所述机器人行走控制方法的步骤。10.一种可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1-7中任一项所述机器人行走控制方法的步骤。
技术总结
本发明提供一种机器人行走控制方法、系统,机器人及可读存储介质,所述方法包括:控制机器人按照预定路线行走;判断机器人在行走方向上的目标位置是否需要转向;如果需要转向,则在控制机器人行走至与所述目标位置相距预设距离时,检测所述目标位置是否存在障碍物;本发明可显著提高机器人遍历效率。本发明可显著提高机器人遍历效率。本发明可显著提高机器人遍历效率。
技术研发人员:朱绍明 任雪
受保护的技术使用者:苏州科瓴精密机械科技有限公司
技术研发日:2020.05.29
技术公布日:2021/12/16
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。