本发明涉及构造体、系统及构造物。
背景技术
以往,以格架(lattice)构造等为代表的包含三维的网形状的构造体被使用。
例如,在专利文献1中,公开了使用格架构造来抑制刚性的下降等对力学特性进行控制的技术。
现有技术文献
专利文献
专利文献1:日本特开2015-93461号公报
技术实现要素:
发明要解决的课题
另一方面,关于包含三维的网形状的构造体,主要开发了对力学特性进行控制的技术,而没有着眼于发挥力学特性以外的新的功能的技术。
所以,本发明的目的是提供一种使用包含三维的网形状的构造体来发挥新的功能的构造体。
用来解决课题的手段
为了达成上述目的,有关本发明的一方式的构造体具备:三维网形状造型体,具有构成三维的网形状的多个网线;以及物体,分别存在于由上述多个网线划分出的多个空间中的两个以上的空间中;多个上述物体是在上述多个空间中的1个空间的内部移动、及/或跨上述多个空间中的两个以上的空间移动的移动体。
进而,有关本发明的一方式的系统具备:上述构造体;以及能量供给装置,对上述多个物体赋予能量从而使上述多个物体移动。
进而,有关本发明的一方式的构造物具备上述构造体。
发明效果
根据本发明,能够提供发挥新的功能的构造体。
附图说明
图1A是有关实施方式1的系统的概略图。
图1B是将有关实施方式1的多个空间中的1个空间放大得到的立体图。
图2是图1A所示的II-II线的构造体的剖视图。
图3是有关实施方式2的系统的概略图。
图4是图3所示的IV-IV线的构造体的剖视图。
图5A是有关实施方式3的构造物的概略图。
图5B是将有关实施方式3的多个空间中的1个空间放大得到的立体图。
图6是图5A所示的构造物的正视图。
具体实施方式
以下,使用附图对有关本发明的实施方式的构造体详细地进行说明。另外,以下说明的实施方式都是表示本发明的一个具体例。因而,在以下的实施方式中表示的数值、形状、材料、构成要素、构成要素的配置以及连接形态、步骤、步骤的顺序等仅是一例,并不是限定本发明。因此,关于以下的实施方式中的构成要素中的、在独立权利要求中没有记载的构成要素,作为任意的构成要素来进行说明。
此外,各图是示意图,并不一定进行严密地图示。因而,例如在各图中比例尺等并不一定一致。此外,在各图中,对于实质上相同的构成赋予相同的标号,将重复的说明省略或简略化。
此外,在本说明书中,平行或正交等的表示要素间的关系性的用语、正方形或长方形等的表示要素的形状的用语、以及数值范围,不是仅表达严格的意义的表述,而是意味着实质上等同的范围、例如也包含几个百分点左右的差异的表述。
此外,在本说明书及附图中,x轴、y轴及z轴表示三维正交坐标系的三个轴。在各实施方式中,设与构成多个空间的边界面之一平行的二个轴为x轴及y轴,设与该边界面正交的方向为z轴方向。
(实施方式1)
[结构]
首先,使用图1A及图1B说明有关本实施方式的系统1000的结构。
图1A是有关实施方式1的系统1000的概略图。有关本实施方式的系统1000是具备构造体100和能量供给装置200的系统。此外,有关本实施方式的系统1000具备载置构造体100的载置台201。构造体100具备三维网形状造型体10和作为移动体的多个物体40。此外,能量供给装置200是对于多个物体40赋予能量从而使多个物体40移动的装置。例如,系统1000是能量供给装置200对于多个物体40赋予能量、多个物体40移动从而发挥构造体100具有的新的功能的系统。有关本实施方式的系统1000例如是能量供给装置200对于多个物体40赋予能量、多个物体40移动从而构造体100进行旋转运动的系统。
有关本实施方式的能量供给装置200是包含电磁铁的装置。有关本实施方式的能量供给装置200例如由线圈、卷绕着该线圈的磁性材料、以及与该线圈连接的电源构成。电流在线圈中流动,从而有关本实施方式的能量供给装置200能够产生磁力及磁场。有关本实施方式的能量供给装置200产生磁场,从而多个物体40被赋予能量。此外,有关本实施方式的能量供给装置200位于构造体100的上方侧(z轴正方向侧)。能量供给装置200可以是通过与载置台201连接的支承支柱202而相离地位于构造体100的上方侧。
接着,对有关本实施方式的构造体100进行说明。如上述那样,构造体100具备:三维网形状造型体10,具有多个网线20;以及物体40,分别存在于由多个网线20划分的多个空间30中的两个以上的空间30中。有关本实施方式的构造体100例如被载置在载置台201。
另外,在本实施方式中,构造体100位于能量供给装置200的下方(z轴负方向侧),但构造体100与能量供给装置200的位置关系并不限于此。此外,构造体100和能量供给装置200也可以直接接触。即,只要是构造体100中包含的多个物体40能够接受从能量供给装置200供给的能量的位置关系,可以是任意的位置关系。
三维网形状造型体10所具有的多个网线20是构成三维的网形状的部件。此外,多个网线20是构成三维网形状造型体10的骨架的部件。多个网线20构成三维的网形状,但不需要将多个网线20分别组编。例如,多个网线20也可以是从多个网线20的一部分分支而延伸的形状。此外,例如多个网线20也可以是将多个网线20分别连接的形状。
有关本实施方式的多个网线20分别是直线形状,但并不限于此。例如,多个网线20也可以分别是曲线形状,也可以是将直线形状与曲线形状组合的形状。多个网线20中的各个网线既可以是线的粗细相同,也可以是线的粗细不同。
有关本实施方式的多个网线20包括线的粗细较粗的多个主网线21、和线的粗细较细的多个副网线22。在本实施方式中,多个主网线21的线的粗细比多个副网线22的线的粗细粗。
有关本实施方式的多个主网线21分别朝向x轴、y轴或z轴中的一方向以直线状延伸。
多个主网线21中的在x轴方向上延伸的线相互平行并且以等间隔排列。多个主网线21中的在y轴方向上延伸的线相互平行并且以等间隔排列。多个主网线21中的在z轴方向上延伸的线相互平行并且以等间隔排列。
此外,在本实施方式中,多个主网线21中的在x轴方向上延伸的线的排列间隔、在y轴方向上延伸的线的排列间隔、和在z轴方向上延伸的线的排列间隔都相等。另外,多个主网线21中的在x轴方向上延伸的线的排列间隔、在y轴方向上延伸的线的排列间隔、和在z轴方向上延伸的线的排列间隔也可以不同。
通过以上那样的多个主网线21的构成,多个主网线21的形状是三维的格子形状。
此外,在后面叙述,有关本实施方式的多个空间30的形状都是立方体形状。多个空间30是被多个网线20划分出的区域,所以有关本实施方式的多个主网线21被设置在与立方体(多个空间30)的各边对应的位置。
此外,使用图1B详细说明有关本实施方式的多个网线20所包含的多个副网线22。
多个空间30是被多个网线20划分出的区域。即,多个空间30是被多个网线20划分出的三维的区域。
有关本实施方式的多个空间30主要是被多个主网线21划分出的区域。但是,多个空间30也可以是被多个主网线21及多个副网线22划分出的区域。即,多个空间30的形状也可以是多个主网线21及多个副网线22组合而构成的形状。
如上述那样,多个主网线21中的在x轴方向上延伸的线的排列间隔、在y轴方向上延伸的线的排列间隔、和在z轴方向上延伸的线的排列间隔都相等。因此,有关本实施方式的多个空间30的形状都是立方体形状。
此外,多个空间30的形状并不限于立方体形状。例如,多个空间30的形状也可以是长方体形状、棱锥形状、棱柱形状、圆锥形状、圆柱形状、球形状及正多面体形状等其他形状,也可以是将这些形状组合的形状。此外,多个空间30的形状也可以分别不同。此外,多个空间30的大小也可以分别不同。例如,多个空间30也可以是较大的立方体形状的空间30与较小的立方体形状的空间30组合。
此外,当设第1方向、第2方向和第3方向分别为相互正交的方向时,多个空间30沿着第1方向、第2方向和第3方向而设置。在本实施方式中,例如x轴方向是第1方向,y轴方向是第2方向,z轴方向是第3方向。有关本实施方式的多个空间30,更具体地讲,在x轴方向上排列有3个,在y轴方向上排列有两个,在z轴方向上排列有两个。另外,在x轴方向、y轴方向及z轴方向上排列的多个空间30的数量并不限于上述。
如上述那样,三维网形状造型体10具有多个网线20。在本实施方式中,由多个网线20划分出的多个空间30的形状是立方体,沿着x轴方向、y轴方向及z轴方向而排列。像这样三维网形状造型体10具有立体的栅格连续地反复的构造,所以也可以说是格架构造体。进而,由于多个空间30在x轴方向上排列有3个,在y轴方向上排列有两个,在z轴方向上排列有两个,所以三维网形状造型体10的形状是长方体形状。
另外,如上述那样,在多个空间30的形状不是立方体形状的情况下,三维网形状造型体10的形状同样不是长方体形状。三维网形状造型体10的形状也可以是长方体形状、棱锥形状、棱柱形状、圆锥形状、圆柱形状、球形状及正多面体形状等其他形状。
此外,有关本实施方式的三维网形状造型体10呈现刚性高的性质。即,即使对于三维网形状造型体10施加力,变形量也非常小。
物体40存在于多个空间30中的两个以上的空间30的各自中。即,在有关本实施方式的构造体100中,存在两个以上的物体40,即存在多个物体40。多个物体40是移动的移动体。具体而言,多个物体40在多个空间30中的1个空间30的内部移动、及/或跨多个空间30中的两个以上的空间30移动。有关本实施方式的多个物体40在多个空间30中的1个空间30的内部移动。另一方面,有关本实施方式的多个物体40不跨多个空间30中的两个以上的空间30移动。
此外,在本实施方式中,多个物体40存在有4个。4个物体40分别存在于多个空间30中的最靠x轴正方向侧的4个空间30的各个空间中。另外,多个物体40所存在的空间30并不限于上述。多个物体40根据构造体100所具有的功能而存在于多个空间30中的两个以上的空间30的各个空间中。
有关本实施方式的多个物体40是固体的物质。多个物体40包含金属材料、无机化合物材料及有机化合物材料中的至少1种以上的材料。金属材料既可以是例如由1种金属构成的材料,也可以是由两种以上的金属构成的合金材料。无机化合物材料也可以是氧化物、氮化物、硫化物及卤化物等。无机化合物材料也可以是来源于盐酸、硝酸、磷酸、硫酸、碳酸、硼酸及氢氟酸等的无机酸的材料。有机化合物材料也可以是由高分子化合物构成的树脂。在本实施方式中,多个物体40包含铁、钴、镍或铁素体等的呈现强磁性的材料。更具体地讲,有关本实施方式的多个物体40包含铁。因此,有关本实施方式的多个物体40呈现强磁性。
有关本实施方式的多个物体40的形状是球形状。但是,多个物体40的形状并不限于此。多个物体40的形状也可以是长方体形状、棱锥形状、棱柱形状、圆锥形状、圆柱形状及卵形状等。
多个物体40的形状是球形状,由此多个物体40的形状不具有角或突起。因此,能够抑制多个物体40在多个空间30的内部中的卡挂,能够在多个空间30的内部顺畅地移动。
接着,使用图1B说明多个空间30所具有的边界面31和多个副网线22的详细情况。
图1B是将有关实施方式1的多个空间30中的1个空间30放大得到的立体图。
在有关本实施方式的多个空间30中,存在构成多个空间30的边界面31。边界面31是在包含该边界面31的多个空间30中被多个网线20划分出的二维的区域。由于有关本实施方式的多个空间30的形状是立方体形状,所以有关本实施方式的多个空间30分别包括6个边界面31。边界面31包含作为多个空间30中的相邻的两个空间30的边界的面。此外,边界面31的一部分是作为三维网形状造型体10的最外侧的面的最外面的一部分。如上述那样,由于三维网形状造型体10的形状是长方体形状,所以最外面是构成该长方体形状的6个面。此外,在本实施方式中,最外面的1个面是构造体100与载置台201相接的面。
接着,说明多个副网线22。
有关本实施方式的多个副网线22分别朝向x轴或z轴中的一方向以直线状延伸。
多个副网线22中的在x轴方向上延伸的线位于多个主网线21中的在x轴方向上延伸并且相邻的线的中央。在本实施方式中,多个副网线22中的在x轴方向上延伸的线位于与xy平面平行的边界面31及与xz平面平行的边界面31。
多个副网线22中的在z轴方向上延伸的线位于多个主网线21中的在z轴方向上延伸并且相邻的线的中央。在本实施方式中,多个副网线22中的在x轴方向上延伸的线位于与yz平面平行的边界面31。
此外,在边界面31中,存在被多个主网线21和多个副网线22包围的开口部31a。多个物体40是否跨多个空间30中的两个以上的空间30移动,取决于开口部31a的大小。即,如果开口部31a较大,则多个物体40容易跨多个空间30中的两个以上的空间30移动。另一方面,如果开口部31a较小,则多个物体40不易跨多个空间30中的两个以上的空间30移动。
如图1B所示,在本实施方式中,开口部31a的形状是长方形。在图1B中,开口部31a用矩形的虚线表示。此外,在本实施方式中,当设开口部31a的短边方向的长度为X时,X比具有球形状的多个物体40的直径短。有关本实施方式的多个网线20所包括的多个主网线21和多个副网线22以上述那样的位置关系配置。
因而,在本实施方式中,多个物体40和多个网线20是使得多个物体40不跨多个空间30中的两个以上的空间30移动那样的结构。
由此,多个物体40能够停留在多个空间30中的1个空间30的内部。
另外,在本实施方式中,在1个边界面31配置1个副网线22,但并不限于此。例如,也可以在1个边界面31配置两个以上的副网线22。此外,在1个边界面31配置两个以上的副网线22的情况下,两个以上的副网线22不需要相互平行。两个以上的副网线22例如也可以是以十字形状或网眼形状交叉的形状。
有关本实施方式的构造体100具有以上那样的结构。这里,对有关本实施方式的构造体100的制造方法进行说明。
[制造方法]
首先,对有关本实施方式的构造体100所具备的三维网形状造型体10的制造方法进行说明。
三维网形状造型体10可以使用3D打印机(附加制造技术)来制造。即,三维网形状造型体10所具有的多个网线20可以使用3D打印机来制造。3D打印机使用表示所希望的三维的制造对象的三维计算机数据,将多个层层叠从而制造三维的制造对象。使用3D打印机的制造方法例如有材料挤压法、液槽光聚合法、材料喷射法、结合剂喷射法或粉末床熔融结合法等。
在本实施方式中,三维网形状造型体10使用材料挤压法来制造。材料挤压法是以下这样的次序。
首先,将纤维熔融,从而得到纤维熔融物。三维网形状造型体10由该纤维构成。接着,基于三维计算机数据,将纤维熔融物从喷嘴向制造台的规定的位置喷出。反复进行喷出该纤维熔融物的处理,从而纤维熔融物的层被层叠,得到所希望的三维的制造对象。此外,也可以在制造后将水溶性的支撑材料去除,从而得到所希望的三维的制造对象。
此外,纤维只要拥有热熔融的性质即可,例如也可以是热塑性树脂和填料(填充剂)配合得到的材料。填料也可以是金属粉、木粉或蓄光材料配合得到的材料。此外,填料通过与树脂复合,能够使树脂拥有新的特性,所以匹配于用途而被选择。
在本实施方式中,三维网形状造型体10及多个网线20使用ABS(Acrylonitrile-Butadiene-Styrene、丙烯腈-丁二烯-苯乙烯)类树脂材料作为纤维而被制造出。另外,在本实施方式中,由于ABS类树脂材料是具有较高的刚性的材料,所以三维网形状造型体10具有较高的刚性。
接着,对有关本实施方式的多个物体40进行说明。在本实施方式中,多个物体40被配置为在三维网形状造型体10的制造中途存在于多个空间30。即,有关本实施方式的三维网形状造型体10的制造在层的层叠的中途被暂停,在配置多个物体40后,再次开始三维网形状造型体10的制造。
使用以上那样的制造方法,制造有关本实施方式的构造体100。
这里,对能量供给装置200产生磁场时的构造体100的动态进行说明。
[磁场发生时的动态]
图2是图1A所示的II-II线处的构造体100的剖视图。更具体地讲,图2表示在有关本实施方式的系统1000中,由能量供给装置200产生磁场、对多个物体40产生磁力M1时的构造体100的动态的图。图2中(a)表示产生磁力M1前的构造体100的剖视图,图2中(b)表示产生磁力M1后的构造体100的剖视图。此外,在图2中,为了避免图变得复杂,没有图示能量供给装置200、载置台201及支承支柱202。
在有关本实施方式的构造体100中,如上述那样,多个物体40存在于多个空间30中的最靠x轴正方向侧的空间30。
此外,有关本实施方式的构造体100包括轴a。轴a是在位于最靠x轴负方向侧且最靠z轴负方向侧的多个主网线21中的1个主网线21的中心、沿着y轴方向延伸的直线状的轴。轴a不能从该轴a自身被固定的位置移动。通过这样的结构,有关本实施方式的构造体100以轴a为中心能够转动地被固定。
此外,有关本实施方式的能量供给装置200是包含电磁铁的装置,产生磁场。
如图2中(a)所示,在产生磁场之前即产生磁力M1之前,构造体100是静止的状态。
另一方面,如图2中(b)所示,在产生磁场后即产生磁力M1后,构造体100以轴a为旋转轴,按照旋转方向R进行旋转运动。对该现象按照以下的机理进行说明。
有关本实施方式的多个物体40呈现强磁性。因此,多个物体40分别被磁场磁化。进而,在多个物体40中,发生被能量供给装置200所包含的电磁铁吸引的磁力M1。在本实施方式中,由于能量供给装置200位于构造体100的上方(z轴正方向侧),所以磁力M1的朝向是z轴正方向。由此,多个物体40在多个空间30中的1个空间30的内部移动。多个物体40移动的结果是,多个物体40与多个网线20接触,将多个网线20向磁力M1的方向推压。由此,在构造体100上,与多个物体40同样,作用有向磁力M1的方向移动的力。另一方面,构造体100以轴a为中心能够转动地被固定。因此,构造体100以轴a为旋转轴,按照旋转方向R进行旋转运动。
通过以上这样的结构,构造体100通过多个物体40移动,从而发挥构造体100所具有的新的功能。在本实施方式中,通过多个物体40移动,构造体100进行旋转运动。即,在本实施方式中,新的功能是构造体100进行旋转运动的功能。此外,在本实施方式中,多个空间30是被三维网形状造型体10所具有的多个网线20划分出的区域,多个物体40对应于构造体100所具有的功能而分别存在于多个空间30中的两个以上的空间30。即,多个物体40对应于构造体100所具有的功能而存在于最优的多个空间30。因此,构造体100能够使构造体100所具有的功能最大限度地发挥。
此外,有关本实施方式的系统1000具备构造体100、以及通过对多个物体40赋予能量而使多个物体40移动的能量供给装置200。
由此,有关本实施方式的系统1000能够容易地使多个物体40移动。因此,结果是有关本实施方式的构造体100能够容易地发挥构造体100所具有的新的功能。
在本实施方式中,多个物体40在多个空间30中的1个空间30的内部移动,但并不限于此。多个物体40也可以跨多个空间30中的两个以上的空间30移动。在此情况下,如果发生磁场,则多个物体40与多个网线20接触,将多个网线20向磁力M1的方向推压。
有关本实施方式的构造体100包括轴a,但并不限于此。在构造体100不包含轴a的情况下、即构造体100没有被能够转动地固定的情况下,构造体100按照磁力M1的方向移动。即,在此情况下,新的功能是构造体100移动的功能。
在本实施方式中,在1个空间30中存在1个物体40,但并不限于此。例如,多个物体40也可以包括第1物体和第2物体,第1物体和第2物体存在于多个空间30中的1个空间30。即,也可以在1个空间30中存在两个物体40。此外,也可以在1个空间30中存在两个以上的物体40。
由此,构造体100可以包括更多的物体40。结果,多个物体40将多个网线20向磁力M1的方向推压的力增加。即,构造体100容易发挥构造体100所具有的新的功能。
[效果等]
如以上这样,有关本实施方式的构造体100具备三维网形状造型体10,该三维网形状造型体10具有构成三维的网形状的多个网线20。此外,有关本实施方式的构造体100具备在由多个网线20划分出的多个空间30中的两个以上的空间30分别存在的物体40。多个物体40是在多个空间30中的1个空间30的内部移动及/或跨多个空间30中的两个以上的空间30移动的移动体。
由此,构造体100通过多个物体40移动,发挥构造体100所具有的新的功能。在本实施方式中,通过多个物体40移动,构造体100进行旋转运动。即,在本实施方式中,新的功能是构造体100旋转运动的功能。此外,在本实施方式中,多个空间30是由三维网形状造型体10所具有的多个网线20划分出的区域,多个物体40对应于构造体100所具有的功能,存在于多个空间30中的两个以上的空间30的各自中。即,多个物体40对应于构造体100所具有的功能而存在于最优的多个空间30。因此,构造体100能够使构造体100所具有的功能最大限度地发挥。
此外,有关本实施方式的构造体100是对于多个物体40和多个网线20而言,多个物体40不跨多个空间30中的两个以上的空间30移动那样的结构。
由此,多个物体40能够停留在多个空间30中的1个空间30的内部。
此外,在有关本实施方式的构造体100中,多个物体40包括第1物体和第2物体,第1物体和第2物体存在于多个空间30中的1个空间30。
由此,构造体100能够包含更多的物体40。结果,多个物体40将多个网线20向磁力M1的方向推压的力增加。即,构造体100容易发挥构造体100所具有的新的功能。
此外,在有关本实施方式的构造体100中,多个物体40的形状是球形状。
由此,多个物体40的形状不具有角或突起。因此,能够抑制多个物体40在多个空间30的内部中的卡挂,能够在多个空间30的内部顺畅地移动。
此外,有关本实施方式的系统1000具备上述构造体100和通过对多个物体40赋予能量而使多个物体40移动的能量供给装置200。
由此,系统1000能够容易地使多个物体40移动。因此,结果是有关本实施方式的构造体100容易发挥构造体100所具有的新的功能。
(实施方式2)
在实施方式1中,表示了多个物体40存在于多个空间30中的一部分的空间30的结构,但并不限于此。在实施方式2中,多个物体40A存在于多个空间30A的全部空间30A这一点与实施方式1不同。另外,在实施方式2中,关于与实施方式1共通的构成要素省略其详细的说明。
[结构]
首先,使用图3对有关本实施方式的系统1000A的结构进行说明。图3是有关实施方式2的系统1000A的概略图。
有关本实施方式的系统1000A是具备构造体100A和能量供给装置200A的系统。此外,有关本实施方式的系统1000A具备载置构造体100A的载置台201A。构造体100A具备三维网形状造型体10A和作为移动体的多个物体40A。此外,能量供给装置200A是向多个物体40A赋予能量从而使多个物体40A移动的装置。有关本实施方式的能量供给装置200A与实施方式1同样是包含电磁铁的装置,设置在比构造体100A靠x轴负方向侧。
例如,系统1000A是能量供给装置200A对多个物体40A赋予能量、多个物体40A移动从而使构造体100A发挥所具有的新的功能的系统。在本实施方式中,系统1000A是能量供给装置200A对多个物体40A赋予能量、多个物体40A移动从而控制构造体100A所具有的特性的系统。即,系统1000A通过多个物体40A移动,来控制构造体100A所具有的光学特性、导电特性、导热特性或流体阻力特性中的1个以上的特性。在本实施方式中,系统1000A是对构造体100A所具有的光学特性进行控制的系统。
此外,三维网形状造型体10A具有多个网线20A。多个网线20A包括多个主网线21A和多个副网线22A。多个空间30A是由多个网线20A划分出的区域。另外,三维网形状造型体10A、多个网线20A、多个空间30A、多个主网线21A、多个副网线22A和多个空间30A是与实施方式1相同的结构。
有关本实施方式的构造体100A与实施方式1所示的构造体100不同,不具有轴a而是被固定在规定的位置。
在本实施方式中,多个物体40A存在于多个空间30A的全部的空间30A。即,在多个空间30A中的全部空间30A的各自中存在1个以上的物体40A。
多个物体40A也可以呈现对光进行控制的特性。例如,多个物体40A可以呈现将光吸收、反射或透射的特性。进而,多个物体40A也可以呈现这样的对光进行控制的特性、以及在实施方式1中表示那样的强磁性。因此,多个物体40A也可以包含不同的两个以上的材料。
有关本实施方式的多个物体40A由芯-壳结构构成。芯-壳结构是包含两种以上的材料的构造,是1种材料形成核(芯)、另一种材料形成将芯的周围包围的层(壳)的构造。在本实施方式中,多个物体40A的芯与实施方式1同样包含铁,多个物体40A的壳包含光吸收率较高的材料。更具体地讲,多个物体40A的壳包含可视光吸收率较高的黑色的材料。黑色的材料例如是炭黑等。通过这样的结构,多个物体40A呈现强磁性,还吸收可视光。另外,黑色的材料并不限于炭黑,也可以是黑色的颜料或黑色的染料,例如也可以是金属氧化物。
接着,说明能量供给装置200A产生磁场时的构造体100A的动态。
[磁场发生时的动态]
图4是图3所示的IV-IV线的构造体100A的剖视图。图4更具体地讲,是表示在有关本实施方式的系统1000A中,通过能量供给装置200A产生磁场、对多个物体40A产生磁力M2时的构造体100A的动态的图。图4中(a)表示产生磁力M2前的构造体100A的剖视图,图4中(b)表示产生磁力M2后的构造体100A的剖视图。此外,在图4中,为了避免图变得复杂,没有图示能量供给装置200A及载置台201A。
有关本实施方式的能量供给装置200A与实施方式1同样,是包括电磁铁的装置,产生磁场。
如图4中(a)所示,在产生磁场之前、即产生磁力M2之前,多个物体40A在多个空间30A的各自中存在于随机的位置。
这里,假设在构造体100A上被照射了光L。光L是向z轴负方向直线前进的光,是由可视光域的波长构成的白色的光。如上述那样,有关本实施方式的多个物体40A将可视光吸收。因此,光L中的入射到多个物体40A的光被多个物体40A吸收而消光。因而,光L中的入射到多个物体40A的光不能透过构造体100A。即,产生磁场之前的构造体100A的光透过率低。
另一方面,如图4中(b)所示,在产生磁场之后、即产生磁力M2之后,构造体100A使更多的光L透过。即,产生磁场后的构造体100A的光透过率高。对于该现象通过以下的机理进行说明。
有关本实施方式的多个物体40A呈现强磁性。因此,多个物体40A被磁场磁化。进而,在多个物体40A中,发生被能量供给装置200A所包含的电磁铁吸引的磁力M2。在本实施方式中,能量供给装置200A位于构造体100A的x轴负方向侧,所以磁力M2的朝向是x轴负方向。由此,多个物体40A在多个空间30A中的1个空间30A的内部移动。多个物体40A移动的结果是,多个物体40A在多个空间30A的各自中位于x轴负方向侧。
由此,当在光L的行进方向(z轴负方向)上观察构造体100A时,多个物体40A位于重叠的位置。因而,通过产生磁力M2(即,通过从图4中(a)向图4中(b)变化),光L中的入射到多个物体40A的光减少。即,产生磁力M2后的构造体100A的光透过率高。即,有关本实施方式的系统1000A能够作为对光的透过率进行控制的光透过率控制元件来使用。
通过以上这样的结构,构造体100A通过多个物体40A移动而发挥构造体100A所具有的新的功能。在本实施方式中,通过多个物体40A移动,能够控制作为构造体100A所具有的光学特性之一的光透过特性。即,在本实施方式中,新的功能是对构造体100A的光透过特性进行控制的功能。此外,具备这样的构造体100A的系统1000A能够作为对光的透过率进行控制的光透过率控制元件来使用。
在本实施方式中,多个物体40存在于多个空间30A的全部空间30A。
由此,构造体100A能够包括更多的物体40A。因此,在磁场产生之前,更多的光L被多个物体40A吸收、消光。即,能够使磁场产生之前的构造体100A的光透过率进一步降低。因而,能够更容易地控制作为构造体100A所具有的光学特性之一的光透过特性。
此外,在本实施方式中,当设第1方向、第2方向和第3方向分别为相互正交的方向时,多个空间30A被设置为沿着第1方向、第2方向和第3方向。在本实施方式中,例如x轴方向是第1方向,y轴方向是第2方向,z轴方向是第3方向。更具体地讲,有关本实施方式的多个空间30A在x轴方向上排列有3个,在y轴方向上排列有两个,在z轴方向上排列有两个,是与实施方式1相同的结构。
由此,能够将构造体100A中的多个空间30A以在第1方向、第2方向及第3方向上重叠的方式配置。由此,构造体100A能够包括更多的物体40A。因此,在磁场产生之前,更多的光L被多个物体40A吸收、消光。即,能够使磁场产生之前的构造体100A的光透过率进一步降低。因而,能够更容易地控制作为构造体100A所具有的光学特性之一的光透过特性。
(实施方式3)
在实施方式1及2中,系统1000及1000A通过能量供给装置200及200A对多个物体40及40A赋予能量,但并不限于此。此外,在实施方式3中,三维网形状造型体10B是弹性变形的弹性体这一点与实施方式1及2不同。进而,在实施方式3中,构造体100B具备间隔壁32B这一点与实施方式1及实施方式2不同。另外,在实施方式3中,关于与实施方式1及2共通的构成要素省略其详细的说明。
[结构]
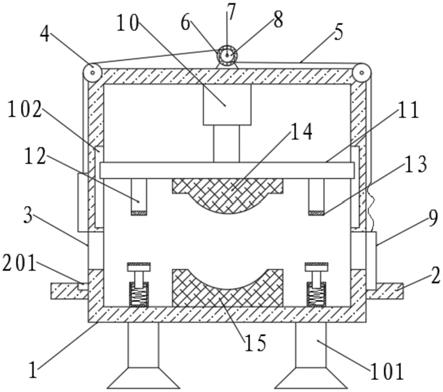
首先,使用图5A及图5B说明有关本实施方式的构造物300B的结构。
图5A是有关实施方式3的构造物300B的概略图。构造物300B是通过多个物体40B在多个空间30B内移动来对构造体100B具有的光学特性、导电特性、导热特性或流体阻力特性中的1个以上的特性进行控制的装置。
有关本实施方式的构造物300B是具备构造体100B和触点50的装置。触点50包括相互为一对的触点51和触点52。在本实施方式中,构造物300B是对构造体100B所具有的导电特性进行控制的电子设备。
有关本实施方式的构造物300B能够作为感测在相互为一对的触点51与触点52之间流经电流的传感器来使用。另外,在本实施方式中,夹着构造物300B而正面相对的触点51与触点52的组合成为相互一对。即,在本实施方式中,存在3个触点51与触点52的组合。
因此,相互为一对的触点51及触点52与用来施加电压的电源装置及用来计测电流值的电流计测装置电连接。但是,在图5A中,为了避免图变得复杂,没有图示电源装置及电流计测装置。
此外,构造体100B具备三维网形状造型体10B、作为移动体的多个物体40B、和抑制多个物体40B的移动的间隔壁32B。三维网形状造型体10B具有多个网线20B。多个网线20B包括多个主网线21B和多个副网线22B。多个空间30B是由多个网线20B划分出的区域。
首先,对有关本实施方式的间隔壁32B和多个物体40B进行说明。
如上述那样,有关本实施方式的构造体100B具备抑制多个物体40B的移动的间隔壁32B。间隔壁32B设置在边界面。此外,间隔壁32B设置在最外面中的1个以上的面整体上。即,在本实施方式中,间隔壁32B设置在作为多个空间30B中的相邻的两个空间30B的边界的面、及最外面中的1个以上的面整体上。此外,有关本实施方式的间隔壁32B包括设置在作为多个空间30B中的相邻的两个空间30B的边界的面上的间隔壁32Ba、以及设置在最外面中的1个以上的面整体上的间隔壁32Bb。
通过这样设置间隔壁32B,抑制多个物体40B跨多个空间30B中的两个以上的空间30B移动。因而,多个物体40B能够停留在多个空间30B中的1个空间30B的内部。进而,能够抑制多个物体40B漏出到三维网形状造型体10B的外部。
有关本实施方式的多个物体40B包括呈现较高的导电率的材料。更具体地讲,多个物体40B的表面由作为呈现较高的导电率的材料的铜覆盖。因此,多个物体40B呈现较高的导电特性。通过多个物体40B分别相互接触,产生用于导电的路径。此外,多个物体40B与实施方式2同样,存在于多个空间30B的全部的空间30B。
另外,有关本实施方式的多个物体40B的形状与实施方式1及2同样,是球形状,多个物体40B的直径比作为立方体形状的多个空间30B的一边长小。
接着,使用图5B对具有多个网线20B的三维网形状造型体10B的详细情况进行说明。
图5B是将有关实施方式3的多个空间30B中的1个空间30B放大得到的立体图。更具体地讲,图5B是将多个空间30B中的位于最靠x轴正方向侧的空间30B放大得到的立体图。因此,在图5B所示的多个空间30B的一个中,在x轴正方向侧设置有间隔壁32Bb,在x轴负方向侧设置有32Ba。
有关本实施方式的三维网形状造型体10B由呈现弹性的弹性体材料构成。即,有关本实施方式的多个网线20B由呈现弹性的弹性体材料构成。在本实施方式中,多个网线20B由热塑性聚氨酯树脂材料构成。但是,构成多个网线20B的材料并不限于上述。
另外,也可以是间隔壁32B由与多个网线20B相同的材料或不同的材料构成。在本实施方式中,间隔壁32B由与多个网线20B相同的材料构成。
这样构成的具有多个网线20B的三维网形状造型体10B是弹性变形的弹性体。弹性体具有被施加力而使弹性体自身的形状变化、将力去除而恢复为原来的弹性体自身的形状的性质。此外,通过三维网形状造型体10B弹性变形,构造体100B及多个空间30B同样地变形。
有关本实施方式的多个网线20B包括线的粗细较粗的多个主网线21B和线的粗细较细的多个副网线22B。多个主网线21B中的在y轴方向及z轴方向上延伸的线与间隔壁32B一体化。此外,多个副网线22B中的在z轴方向上延伸的线也同样与间隔壁32B一体化。
接着,说明在构造物300B上施加了力P时的构造物300B的动态。
[产生力P时的动态]
图6是图5A所示的构造物300B的正视图。更具体地讲,图6是将图5A所示的构造物300B在y轴负方向上观察的正视图。图6中(a)表示产生力P之前的构造物300B的正视图,图6中(b)表示产生力P之后的构造物300B的正视图。
在有关本实施方式的构造物300B上,施加从外部推压的力P。在本实施方式中,力P的方向发生在将构造物300B夹入的方向。即,力P的方向是相对于构造物300B的上表面(z轴正方向侧的表面)朝向z轴负方向以及相对于构造物300B的下表面(z轴负方向侧的表面)朝向z轴正方向的方向。
如上述那样,多个物体40B的直径比作为立方体形状的多个空间30B的一边长小。由此,如图6中(a)所示,在产生力P之前,多个物体40B分别相互不接触。因此,相互为一对的触点51与触点52之间的电阻值非常高,在相互为一对的触点51与触点52之间不会流过电流。
另一方面,如图6中(b)所示,在产生力P之后,多个物体40B分别相互接触,此外,多个物体40B也与触点51及触点52接触。由此,在相互为一对的触点51与触点52之间流过电流。对于该现象通过以下的机理进行说明。
有关本实施方式的三维网形状造型体10B是弹性变形的弹性体。因此,构造体100B根据力P的方向弹性变形,结果是多个空间30B的形状变形。即,多个空间30B的形状以多个空间30B的体积变小的方式而变形。
多个物体40B随着多个空间30B的变形而在多个空间30B中的1个空间30B中的位置变化。即,多个物体40B随着多个空间30B的变形而在多个空间30B中的1个空间30B的内部移动。多个物体40B移动的结果是,多个物体40B分别相互接触。此外,多个物体40B也与触点51及触点52接触。如上述那样,有关实施方式的多个物体40B的表面被呈现较高的导电率的铜覆盖,所以产生用于导电的路径。即,相互为一对的触点51与触点52之间的电阻值非常低,在相互为一对的触点51与触点52之间流经电流。即,具有构造体100B的构造物300B能够作为压力传感器来使用。
另外,如果进而力P被去除,则三维网形状造型体10B弹性变形,构造物300B返回到图6中(a)所示的多个物体40B分别相互不接触的状态。即,通过力P的有无,能够对于在相互为一对的触点51与触点52之间是否流经电流进行控制。因此,构造物300B也能够作为开关元件来使用。
综上所述,有关本实施方式的构造物300B具备构造体100B。
由此,构造物300B通过多个物体40B移动,能够发挥构造体100B所具有的新的功能。
此外,构造物300B通过多个物体40B移动,对构造体100B所具有的光学特性、导电特性、导热特性和流体阻力特性中的1个以上的特性进行控制。在本实施方式中,构造物300B对构造体100B所具有的导电特性进行控制。即,有关本实施方式的构造体100B所具有的新的功能是对构造体100B的导电特性进行控制的功能。
由此,构造物300B能够作为感测流经电流的传感器来使用。此外,构造物300B也能够作为开关元件来使用。另一方面,构造物300B通过变更控制的特性,能够用于与上述的传感器及开关元件不同的用途。
此外,有关本实施方式的构造物300B是电子设备。
由此,构造物300B能够作为容易向其他装置组装的电气设备来使用。
此外,有关本实施方式的三维网形状造型体10B是弹性变形的弹性体。
由此,通过对三维网形状造型体10B赋予力P,三维网形状造型体10B的形状变化,容易使多个物体40B移动。
此外,如上述那样,有关本实施方式的构造体100B具备抑制多个物体40B的移动的间隔壁32B,间隔壁32B设置在构成多个空间30B的边界面。
进而,在有关本实施方式的构造体100B中,边界面的一部分是作为三维网形状造型体10B的最外侧的面的最外面的一部分,间隔壁32B设置在最外面中的1个以上的面整体。
由此,抑制多个物体40B跨多个空间30B中的两个以上的空间30B移动。进而,由此多个物体40B能够停留在多个空间30B中的1个空间30B的内部。进而,能够抑制多个物体40B漏出到三维网形状造型体10B的外部。此外,在如本实施方式中表示那样三维网形状造型体10B是弹性体的情况下,通过构造体100B具备间隔壁32B,能够抑制由力P带来的构造体100B的破坏。
(实施方式3的变形例)
这里,说明实施方式3的变形例。另外,在本变形例中,关于与实施方式3共通的构成要素,省略其详细的说明。
在实施方式3中,表示了多个物体40B的直径比作为立方体形状的多个空间30B的一边长小的结构,但并不限于此。在本变形例中,多个物体40B的直径比作为立方体形状的多个空间30B的一边长大。
即,在本变形例中,存在于多个空间30B中的不同的空间30B的各自中的多个物体40B彼此接触。即,即使是在构造物300B上没有施加从外部推压的力P的情况下,多个物体40B分别也预先相互接触,在相互为一对的触点51与触点52之间流经电流。
此外,在本变形例中,力P的方向发生在将构造物300B拉伸的方向上。即,力P的方向是相对于构造物300B的上表面(z轴正方向侧的表面)朝向z轴正方向和相对于构造物300B的下表面(z轴负方向侧的表面)朝向z轴负方向的方向。
在本变形例中,如果在构造物300B上施加力P,则构造体100B根据力P的方向而弹性变形,结果是多个空间30B的形状变形。即,多个空间30B的形状以多个空间30B的体积变大的方式而变形。
多个物体40B随着多个空间30B的变形而在多个空间30B中的1个空间30B中的位置变化。即,多个物体40B随着多个空间30B的变形而在多个空间30B中的1个空间30B的内部移动。多个物体40B移动的结果是,多个物体40B分别相互不再接触。因此,相互为一对的触点51与触点52之间的电阻值非常高,在相互为一对的触点51与触点52之间不会流经电流。即,具有有关本变形例的构造体100B的构造物300B能够作为压力传感器来使用。
综上所述,在有关本变形例的构造物300B中,存在于多个空间30B中的不同空间30B的各自中的多个物体40B彼此接触。
由此,通过多个物体40B移动,能够对于多个物体40B彼此是否接触进行控制,所以能够发挥构造体100B所具有的新的功能。
(其他)
以上,基于上述的实施方式说明了有关本发明的构造体、系统及构造物,但本发明并不限定于上述的实施方式。
在实施方式中,多个网线包括线的粗细较粗的多个主网线和线的粗细较细的多个副网线,但并不限于此。多个网线的全部也可以是相同的线的粗细,即,主网线和副网线也可以是相同的线。多个网线的截面形状是怎样的形状都可以。例如,多个网线的截面形状也可以是圆形状或多边形状。进而,多个网线的截面形状也可以是在圆形状或多边形状设有突起的形状(例如星形形状或齿轮形状等)。特别是,在为设有突起的形状的情况下,容易抑制多个物体的移动。
此外,在实施方式中,多个网线包括的多个主网线及多个副网线是在x轴、y轴或z轴方向上延伸的线,但并不限于此。例如,多个主网线及多个副网线也可以是与x轴、y轴及z轴方向的任一方向都不平行的线。即,多个主网线及多个副网线也可以是在任意的方向上延伸的线。
另外,在实施方式1及2中,表示了三维网形状造型体呈现较高的刚性的结构,但并不限于此。例如,实施方式1中的三维网形状造型体也可以与实施方式3同样是弹性变形的弹性体。进而,实施方式1中的三维网形状造型体也可以是三维网形状造型体的一部分呈现较高的刚性,三维网形状造型体的其他的一部分是弹性体。即,也可以三维网形状造型体所具有的多个网线的一部分呈现较高的刚性,多个网线的其他的一部分是弹性体。在为这样的将刚性较高的一部分与作为弹性体的一部分组合得到的三维网形状造型体的情况下,如果发生实施方式1所示的磁场,则构造体能够发挥仅使作为弹性体的部分弹性变形的功能。
此外,在实施方式中,边界面及最外面是平面,但也可以是曲面。
在实施方式1及2中,能量供给装置是包含电磁铁的装置,产生磁场,但并不限于此。能量供给装置也可以产生热能、光能、化学能或力学性能等,也可以是将他们组合而产生。
此外,在实施方式1及2中,多个物体被赋予能量供给装置所产生的能量从而移动,但并不限于此。例如,也可以将构造体相对于水平倾斜从而多个物体由于重力而移动。
另外,在实施方式1、2及3中,多个物体使用铁或铜,但并不限于此。多个物体也可以根据使该多个物体移动的能量来选择。
此外,也可以是多个物体分别由不同的材料构成。即,例如也可以是多个物体中的1个物体包含第1材料,与该1个物体不同的1个物体包含与第1材料不同的第2材料。具体而言,也可以是多个物体中的1个物体与实施方式1同样包含铁,与该1个物体不同的1个物体包含钴。
在实施方式2中,光吸收率较高的材料的种类根据光L包含的波长来选择。例如,在光L是红外光的情况下,光吸收率较高的材料从吸收红外光的材料中选择。此外,例如在光L为紫外光的情况下,光吸收率较高的材料从吸收紫外光的材料中选择。
在实施方式2中,表示了对作为构造体所具有的光学特性之一的光透过特性进行控制的结构,但并不限于此。例如也可以对光反射特性或光散射特性进行控制。
在实施方式3中,表示了对构造体所具有的导电特性进行控制的结构,但并不限于此。例如也可以对导热特性进行控制。在此情况下,也可以是多个物体包含呈现较高的导热性的材料。呈现较高的导热性的材料例如可以使用金属材料等。由此,如果多个物体分别相互接触,则产生用于导热的路径。
说明了对构造体所具有的特性中的流体阻力特性进行控制的情况。流体例如是水。在这样的情况下,例如使用开口部的形状为圆形状、多个物体的形状为球形状、并且多个物体的直径比开口部的圆形状的直径大的结构。由此,在多个物体将开口部覆盖的情况下,流体不能经由开口部跨多个空间中的两个以上的空间移动。另一方面,在多个物体移动,多个物体没有将开口部覆盖的情况下,流体能够跨多个空间中的两个以上的空间移动。这样,通过多个物体的移动,能够切换多个物体是否将开口部覆盖,所以能够对构造体所具有的流体阻力特性进行控制。
另外,构造体也可以通过多个物体在多个空间内移动来发出声音。多个物体移动的结果也可以是,通过多个物体与多个网线接触,构造体发出声音。由此,多个物体移动通过声音来被识别。
此外,在实施方式中,三维网形状造型体及多个网线由ABS类树脂材料或热塑性聚氨酯树脂材料构成,但并不限于此。例如,三维网形状造型体及多个网线也可以由尼龙类树脂材料、PLA(Poly-LacticAcid、聚乳酸)类树脂材料、聚碳酸酯类树脂材料、聚碳酸酯/ABS合金类树脂材料、PPSF(PolyPhenylSulfone、聚苯砜)/PPSU(PolyPhenylSulfone、聚苯砜)类树脂材料、ASA(acrylate-styrene-acrylonitrile、丙烯酸酯-苯乙烯-丙烯腈)类树脂材料、PEEK(PolyEtherEtherKetone、聚醚醚酮)类树脂材料、PEI(PolyEtherImide、聚醚酰亚胺)类树脂材料、环氧类树脂材料、聚丙烯类树脂材料、氯乙烯类树脂材料、特氟龙(注册商标)类树脂材料或聚对苯二甲酸乙二醇酯类树脂材料等的材料构成。此外,并不限于上述的材料,三维网形状造型体及多个网线也可以由工程塑料或超级工程塑料等的材料构成。根据构造体的用途,选择构成三维网形状造型体及多个网线的材料。
如在实施方式1中表示那样,三维网形状造型体通过材料挤压法来制造。但是,并不限于此。例如,三维网形状造型体可以通过液槽光聚合法来制造。
液槽光聚合法是以下这样的次序。构成三维网形状造型体的材料具有流动性。构成三维网形状造型体的材料被暴露于规定的刺激下从而构成三维网形状造型体的材料成为被硬化的层,以成为所希望的三维的制造对象。硬化后的层被层叠,从而得到希望的三维的制造对象。例如,构成三维网形状造型体的材料可以使用紫外线硬化树脂,规定的刺激可以使用紫外线。
此外,在实施方式中,多个物体被配置为使其在三维网形状造型体的制造途中存在于多个空间,由此制造出构造体,但并不限于此。例如,在如实施方式3所示那样三维网形状造型体是弹性变形的弹性体的情况下,多个物体也可以在三维网形状造型体的制造后使开口部的形状弹性变形从而被从开口部插入。进而,多个物体与三维网形状造型体同样可以通过3D打印机使用材料挤压法来制造。在此情况下,在多个物体及三维网形状造型体由相同的材料构成的情况下,可以使用相同材料的纤维。另一方面,在多个物体及三维网形状造型体由不同的材料构成的情况下,可以分别使用不同的材料的纤维。此外,在多个物体的制造中,与三维网形状造型体同样可以使用液槽光聚合法、材料喷射法、结合剂喷射法或粉末床熔融结合法等。
另外,在实施方式1及2中,构造体被载置在载置台上,但并不限于此。构造体只要能够接受从能量供给装置供给的能量,可以以任意的方法设置。此外,系统也可以不具备载置台及支承支柱。
除此以外,对各实施方式施以本领域技术人员想到的各种变形而得到的形态或在不脱离本发明的主旨的范围内通过将各实施方式中的构成要素及功能任意地组合而实现的形态也包含在本发明中。
标号说明
10三维网形状造型体;20网线;30空间;31边界面;32B间隔壁;40物体;100构造体;200能量供给装置;300B构造物;1000系统。
本文用于企业家、创业者技术爱好者查询,结果仅供参考。