1.本实用新型涉及机械加工设备领域,具体为一种三坐标测量机用定位装置。
背景技术:
2.三坐标即三坐标测量机,它是指在三维可测的空间范围内,能够根据测头系统返回的点数据,通过三坐标的软件系统计算各类几何形状、尺寸等测量能力的仪器,又称为三次元、三坐标测量机、三坐标测量仪;
3.在三坐标测量时,将工件码放在作业平台上,在测量时,工件会活动,产生测量误差,通过夹具夹持,现有的夹具不能适当夹持,会因为用力过猛对工件产生损坏,不能保证工件完整,在工件变换形态时,需要重复夹持,测量数据不匹配,会产生误差,导致测量不准确。
技术实现要素:
4.本实用新型的目的在于提供一种三坐标测量机用定位装置,解决了现有的夹具不能适当夹持,会因为用力过猛对工件产生损坏,不能保证工件完整,在工件变换形态时,需要重复夹持,测量数据不匹配,会产生误差,导致测量不准确的技术问题。
5.本实用新型的目的可以通过以下技术方案实现:
6.一种三坐标测量机用定位装置,包括底板、摆动结构和夹持结构,所述底板的顶侧安装有摆动结构,所述摆动结构的顶部安装有夹持结构;
7.所述夹持结构包括支撑板、气箱、气泵、气囊、挤压板、活动框、活动杆、活动套筒、支撑座、弹簧、夹板和橡胶垫,所述支撑座竖直固定在支撑板的顶侧,所述活动套筒通过阻尼轴配合安装在支撑座内,所述活动套筒的一端安装有活动框,所述活动框的一侧内壁上粘贴有气囊,所述气囊上粘贴有活动框,所述活动杆穿设在活动套筒的内部,所述活动杆的一端固定有夹板,所述夹板的侧壁上粘贴有橡胶垫,所述气箱固定在支撑板的顶侧,所述气箱的顶侧安装有气泵。
8.作为本实用新型进一步的方案:所述夹持结构为对称结构,两所述夹板对立面为弧形面。
9.作为本实用新型进一步的方案:所述气箱通过软管与气囊连接,所述挤压板与活动杆平行设置。
10.作为本实用新型进一步的方案:所述弹簧套装在活动杆的一端外部,所述弹簧的两端分别固定在活动套筒和夹板上。
11.作为本实用新型进一步的方案:所述摆动结构包括摆动座、连动杆、滑块、滑轨、马达、指针和摆动杆,所述摆动座固定在底板的顶侧,所述摆动杆的底端通过销轴配合安装在摆动座的内部,所述指针固定在销轴的一端,所述滑轨固定在底板的顶侧,所述滑块配合卡装在滑轨的顶侧,所述连动杆的底端通过合页配合安装在滑块的顶侧,所述连动杆通过固定轴配合安装在摆动杆上。
12.作为本实用新型进一步的方案:所述马达安装在底板的顶侧,所述马达的转轴上安装有丝杆,丝杆通过螺纹配合贯穿滑块的内部,所述支撑板固定在摆动杆的顶端。
13.本实用新型的有益效果:通过将工件放置在两夹板之间,通过气泵向气箱内进气,能够实现对气囊加压,在气囊加压后,实现对挤压板的推动,实现对活动杆的挤压,活动杆在活动套筒内滑动,推动夹板移动,两夹板配合实现对工件的夹持,在夹持时,在夹板的内侧设置有橡胶垫,通过气动挤压,能够更好的保证工件不会被夹持变形,保证工件完整,定位更加准确;
14.通过丝杆旋转,实现滑块沿滑轨滑动,通过连动杆配合,实现对摆动杆摆动方向进行调整,在指针的配合下能够准确调整工件摆动位置,能够更好的配合实现三坐标测量。
附图说明
15.为了便于本领域技术人员理解,下面结合附图对本实用新型作进一步的说明。
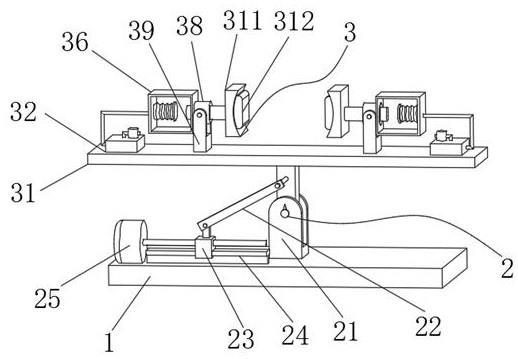
16.图1为本实用新型整体正视立体结构图;
17.图2为本实用新型整体侧视立体结构图;
18.图3为本实用新型整体正视平面结构图;
19.图中:1、底板;2、摆动结构;3、夹持结构;21、摆动座;22、连动杆;23、滑块;24、滑轨;25、马达;26、指针;27、摆动杆;31、支撑板;32、气箱;33、气泵;34、气囊;35、挤压板;36、活动框;37、活动杆;38、活动套筒;39、支撑座;310、弹簧;311、夹板;312、橡胶垫。
具体实施方式
20.下面将结合实施例对本实用新型的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其它实施例,都属于本实用新型保护的范围。
21.如图1
‑
3所示,一种三坐标测量机用定位装置,包括底板1、摆动结构2和夹持结构3,底板1的顶侧安装有摆动结构2,摆动结构2的顶部安装有夹持结构3;
22.夹持结构3包括支撑板31、气箱32、气泵33、气囊34、挤压板35、活动框36、活动杆37、活动套筒38、支撑座39、弹簧310、夹板311和橡胶垫312,支撑座39竖直固定在支撑板31的顶侧,活动套筒38通过阻尼轴配合安装在支撑座39内,活动套筒38的一端安装有活动框36,活动框36的一侧内壁上粘贴有气囊34,气囊34上粘贴有活动框36,活动杆37穿设在活动套筒38的内部,活动杆37的一端固定有夹板311,夹板311的侧壁上粘贴有橡胶垫312,气箱32固定在支撑板31的顶侧,气箱32的顶侧安装有气泵33。
23.夹持结构3为对称结构,两夹板311对立面为弧形面,气箱32通过软管与气囊34连接,挤压板35与活动杆37平行设置,弹簧310套装在活动杆37的一端外部,弹簧310的两端分别固定在活动套筒38和夹板311上,能够实现对工件的稳定夹持,保证工件的完整无损。
24.摆动结构2包括摆动座21、连动杆22、滑块23、滑轨24、马达25、指针26和摆动杆27,摆动座21固定在底板1的顶侧,摆动杆27的底端通过销轴配合安装在摆动座21的内部,指针26固定在销轴的一端,滑轨24固定在底板1的顶侧,滑块23配合卡装在滑轨24的顶侧,连动杆22的底端通过合页配合安装在滑块23的顶侧,连动杆22通过固定轴配合安装在摆动杆27
上,马达25安装在底板1的顶侧,马达25的转轴上安装有丝杆,丝杆通过螺纹配合贯穿滑块23的内部,支撑板31固定在摆动杆27的顶端,能够配合实现对工件位置的调整,更好的实现三坐标检测。
25.本实用新型的工作原理:在使用时,将工件放置在两夹板311之间,通过气泵33向气箱32内进气,能够实现对气囊34加压,在气囊34加压后,实现对挤压板35的推动,实现对活动杆37的挤压,活动杆37在活动套筒38内滑动,推动夹板311移动,两夹板311配合实现对工件的夹持,在夹持时,在夹板311的内侧设置有橡胶垫312,通过气动挤压,能够更好的保证工件不会被夹持变形,保证工件完整,定位更加准确,在夹持后,马达25作业,通过丝杆旋转,实现滑块23沿滑轨24滑动,通过连动杆22配合,实现对摆动杆27摆动方向进行调整,在指针26的配合下能够准确调整工件摆动位置,能够更好的配合实现三坐标测量。
26.以上公开的本实用新型优选实施例只是用于帮助阐述本实用新型。优选实施例并没有详尽叙述所有的细节,也不限制该实用新型仅为所述的具体实施方式。显然,根据本说明书的内容,可作很多的修改和变化。本说明书选取并具体描述这些实施例,是为了更好地解释本实用新型的原理和实际应用,从而使所属技术领域技术人员能很好地理解和利用本实用新型。本实用新型仅受权利要求书及其全部范围和等效物的限制。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。