1.本实用新型涉及自动化焊接设备技术领域,尤其是涉及一种车桥壳体激光焊接装置。
背景技术:
2.车桥是汽车的关键部件之一,使用中其受力情况复杂。它不但承重和传力,还承受着巨大的动载荷和静载荷所形成的弯矩和扭矩,为此必须要求车桥有足够的强度、刚度和韧性,因为这直接关系到汽车的行驶安全和乘客及司机人身安全。因此,保证车桥壳体的焊接质量是十分重要的。早先使用的焊机是晶闸管焊机,电流类型是直流,飞溅大,焊缝合格率在95%以下,工件表面有大颗粒飞溅物,焊后需要再次清理,工人的作业环境差,劳动强度大;其次传统的焊接方式焊接时所需夹具品种多,无法进行柔性共线生产,生产成本比较高,生产效率也比较低。
技术实现要素:
3.本实用新型的目的就是针对上述情况,提供一种车桥壳体激光焊接装置,该焊接装置占地面积小,清洁环保,自动化程度高,采用激光焊接焊接质量可靠。
4.本实用新型的具体方案是:一种车桥壳体激光焊接装置,具有机架,所述机架上装有罩壳,罩壳的一端侧面上开设有门形缺口,门形缺口上设置有提升门机构,门形缺口上位于所述提升门机构的正下方处设置有用于工件交替转换的旋转输送机构;所述罩壳内设有机器人,所述机器人的机械手臂上设有激光焊接头,激光焊接头用于对旋转输送机构上的工件进行激光焊接操作,与激光焊接头对应连接的激光焊接机安置在罩壳内部,所述罩壳顶部设置有除尘装置。
5.进一步的,本实用新型中所述旋转输送机构是由支撑架、转盘、推力球轴承、齿圈、齿轮和驱动电机构成,所述齿圈水平安置并通过推力球轴承与所述支撑架相连接,所述转盘固定安置在所述齿圈的上端面上并随着齿圈一起旋转,所述齿圈与齿轮啮合连接,齿轮与所述驱动电机传动连接;所述转盘上面设置有相对布置的两套工件夹具,工件夹具用于装夹车桥壳体工件,所述转盘一半处于罩壳内部另一半处于罩壳内部。
6.进一步的,本实用新型中所述提升门机构包括有设置在门形缺口处的提升门板和设置在罩壳上的提升驱动器,提升驱动器驱动所述提升门板沿着门形缺口上下移动。
7.进一步的,本实用新型中所述驱动器采用油缸、气缸或电缸中的任意一种。
8.进一步的,本实用新型中所述转盘为圆形盘或方形盘。
9.进一步的,本实用新型中所述机架的底部边上还设有水平调节机构,水平调节机构包括有垫块、调节螺母和调节螺杆,调节螺杆底端与垫块连接,调节螺杆上部与所述机架螺纹连接并通过调节螺母进行调节。
10.本实用新型是利用可聚焦、可调控的高能量密度激光束为热源实现材料的融化对车桥壳体进行焊接,热作用集中,焊接变形小;柔性自动化实施性好;同时本实用新型结构
简单,制造成本低,可实现数字化、智能化制造,设备占地面积相对较小、结构简单、制造成本低、清洁环保,自动化程度高,焊接质量可靠,具有很好的实际使用以及推广价值。
附图说明
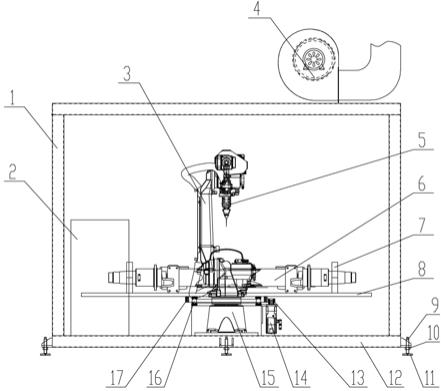
11.图1是本实用新型的主视方向结构示意图;
12.图2是本实用新型的俯视方向结构示意图;
13.图3是本实用新型的侧视方向内部结构示意图。
14.图中:1—罩壳,2—激光焊接机,3—机器人,4—除尘装置,5—激光焊接头,6—车桥壳体工件,7—工件夹具,8—转盘,9—调节螺杆,10—调节螺母,11—垫块,12—机架,13—齿轮,14—驱动电机,15—支撑架,16—推力球轴承,17—齿圈,18—机械手臂,19—提升驱动器,20—提升门板。
具体实施方式
15.下面将结合本实用新型的附图,对本实用新型的技术方案进行清楚完整的描述,显然所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其它实施例,都属于本实用新型的保护范围。
16.在本实用新型的描述中,需要说明的是,术语“上”、“下”、“内”、“外”等指示方位或位置关系为基于附图所示的方位或位置关系,或者是该实用新型产品使用时惯常摆放的方位或位置关系,仅是为了便于描述本实用新型或简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造或操作,因此不能理解为对本实用新型的限制。
17.在本实用新型的描述中,还需要说明的是,除非另有明确的规定和限制,术语“设置”、“安装”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸的连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
18.参见图1
‑
图3,本实用新型是一种车桥壳体激光焊接装置,具有机架12,所述机架上装有罩壳1,罩壳的一端侧面上开设有门形缺口,门形缺口上设置有提升门机构,门形缺口上位于所述提升门机构的正下方处设置有用于工件交替转换的旋转输送机构;所述罩壳内设有机器人3,所述机器人的机械手臂18上设有激光焊接头5,激光焊接头用于对旋转输送机构上的工件进行激光焊接操作,与激光焊接头对应连接的激光焊接机2安置在罩壳内部,所述罩壳顶部设置有除尘装置4。
19.进一步的,本实施例中所述旋转输送机构是由支撑架15、转盘8、推力球轴承16、齿圈17、齿轮13和驱动电机14构成,所述齿圈水平安置并通过推力球轴承与所述支撑架相连接,所述转盘固定安置在所述齿圈的上端面上并随着齿圈一起旋转,所述齿圈与齿轮啮合连接,齿轮与所述驱动电机传动连接;所述转盘上面设置有相对布置的两套工件夹具7,工件夹具用于装夹车桥壳体工件6,所述转盘一半处于罩壳内部另一半处于罩壳内部,转盘在齿圈转动的带动下交替将上面的车桥壳体工件轮流旋转进入罩壳内进行激光焊接操作。
20.进一步的,本实施例中所述提升门机构包括有设置在门形缺口处的提升门板20和设置在罩壳上的提升驱动器19,提升驱动器驱动所述提升门板沿着门形缺口上下移动。
21.进一步的,本实施例中所述驱动器采用油缸、气缸或电缸中的任意一种。
22.进一步的,本实施例中所述转盘为圆形盘或方形盘。
23.进一步的,本实施例中所述机架的底部边上还设有水平调节机构,水平调节机构包括有垫块11、调节螺母10和调节螺杆9,调节螺杆底端与垫块连接,调节螺杆上部与所述机架螺纹连接并通过调节螺母进行调节。
24.机器人、旋转输送机构、激光焊接头、除尘装置、罩壳一起安装在机架上。罩壳既可以阻挡激光对人体的伤害,也能防止焊接烟尘外溢,机架由型材焊接而成,底部周边有水平调节机构,以保证设备整体平稳的与地面接触。旋转输送机构由支撑架、转盘、推力球轴承、齿圈、齿轮、驱动电机等组成,通过驱动电机驱动,转盘可以绕支撑架中心360度旋转,人工或机器人将车桥壳体工件放置在转盘上的1号工位专用工件夹具上,旋转输送机构中的转盘旋转180度,将待焊车桥壳体工件送入罩壳内,此时提升门机构关闭,机器人驱动激光焊接头按照设定的程序进行焊接动作,产生的烟尘由除尘装置在线处理。与此同时,人工或机器人将另一件待焊车桥壳体工件放置在转盘2号工位专用工件夹具上。1号工位的车桥壳体工件焊接完成后,提升门机构开启,转盘旋转180度,将2号工位的车桥壳体工件送入设备的同时,1号工位的车桥壳体工件输出至上下料位置,完成一个循环。
25.本实用新型是利用可聚焦、可调控的高能量密度激光束为热源实现材料的融化对车桥壳体进行焊接,热作用集中,焊接变形小;柔性自动化实施性好;同时本实用新型设备结构简单,制造成本低,可实现数字化、智能化制造,设备占地面积相对较小、结构简单、制造成本低、清洁环保,自动化程度高,焊接质量可靠,具有很好的实际使用以及推广价值。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。