1.本实用新型涉及工业机械技术领域,尤其是涉及一种翻转顶升传送装置。
背景技术:
2.现有技术中的来料姿态与装配时姿态角度不一致时多采用的是夹具机器人进行装配,但对机器人安装空间有要求,要有安全防护,且成本相对较高。
3.随着自动化智能制造应用越来越普及,对流水线自动化装配需求量越来越大,当前来料形式日益变化对入料的装配工艺也是有很大的困难。
4.本技术人发现现有技术至少存在以下技术问题:
5.来料姿态与装配时姿态角度不一致时采用夹具机器人进行装配,对机器人安装空间有要求且成本相对较高。
技术实现要素:
6.本实用新型的目的在于提供一种夹紧翻转入料机构,以解决现有技术中存在的来料姿态与装配时姿态角度不一致时采用夹具机器人进行装配,对机器人安装空间有要求且成本相对较高的技术问题
。
7.为实现上述目的,本实用新型提供了以下技术方案:
8.本实用新型提供的翻转顶升传送装置,包括机架及其上的夹爪驱动机构、夹爪机构、翻转机构、物料顶升机构、水平推送机构和物料传送机构,所述夹爪驱动机构与所述夹爪机构连接且能驱动所述夹爪机构水平运动或上下运动至预定的位置,所述夹爪机构抓取物料后能通过所述夹爪驱动机构移动至物料翻转支架上方,所述物料翻转支架与所述翻转机构连接且能在所述翻转机构的驱动下翻转到水平状态或竖直状态,所述物料顶升机构用于将翻转至水平状态的物料翻转支架内的物料向上顶出至所述物料翻转支架外,所述水平推送机构能沿水平方向将顶出的物料推送至所述物料传送机构上。
9.优选地,所述夹爪驱动机构包括竖直运动电缸和水平运动电缸,所述竖直运动电缸和所述水平运动电缸均与所述夹爪机构相连接。
10.优选地,所述夹爪机构包括位于机架下方的夹爪组件、夹紧松开气缸、气缸安装板和水平运动电缸连接部,其中,所述水平运动电缸与所述水平运动电缸连接部相连接,所述水平运动电缸连接部位于所述气缸安装板的上方,所述水平运动电缸连接部通过直线轴承连接组件与所述气缸安装板连接,所述竖直运动电缸自上而下依次穿过所述机架和所述水平运动电缸连接部与所述气缸安装板相连接,两个所述夹紧松开气缸分别固定在所述气缸安装板两端的底部,所述夹紧松开气缸与所述夹爪组件相连接。
11.优选地,所述水平运动电缸连接部包括竖直板、水平连接板和导轨滑块结构,所述水平连接板位于所述气缸安装板的上方,所述竖直板连接在所述水平连接板的上方且所述竖直板的部分区段穿出所述机架与设置在所述机架上方的所述水平运动电缸连接,所述导轨滑块结构的导轨固定在所述机架的底部,所述水平连接板与所述导轨滑块结构的滑块连
接,所述滑块与所述导轨滑动连接。
12.优选地,所述直线轴承连接组件包括导向连杆和直线轴承,所述水平连接板的两端分别设置有一个所述直线轴承,所述导向连杆的下端与所述气缸安装板固定,所述导向连杆的自由端向上穿出所述直线轴承和所述机架,所述竖直运动电缸能通过所述气缸安装板带动所述导向连杆在所述直线轴承内沿竖直方向运动;
13.所述机架包括竖直基架和水平基架,两组所述竖直基架相对设置于所述水平基架的下方,每组所述竖直基架至少包括相对设置的两个竖直边框和连接在所述竖直边框上方的水平边框,所述水平基架的两端与对应的所述水平边框可拆卸连接,所述水平基架上开设有第一避让槽和第二避让槽,两个所述第二避让槽分别位于所述第一避让槽的两侧,所述竖直运动电缸和所述竖直板能穿过所述第一避让槽且能在所述第一避让槽内水平移动,两个所述导向连接分别通过对应的所述第二避让槽穿出且能在所述第二避让槽内水平移动。
14.优选地,所述翻转机构包括旋转气缸、翻转轴、第一安装侧板和第二安装侧板,所述第一安装侧板和所述第二安装侧板分别固定设置在同一竖直基架的两个所述竖直边框上,所述旋转气缸与所述第一安装侧板相连接,所述翻转轴的一端与所述旋转气缸连接,所述翻转轴的另一端与所述第二安装侧板连接,所述翻转轴与所述物料翻转支架连接,所述旋转气缸能通过所述翻转轴带动所述物料翻转支架绕水平轴线转动。
15.优选地,所述物料顶升机构包括提升气缸、顶升部和顶升托板,所述顶升机构通过连接长板设置在同一竖直基架的两个所述竖直边框上,所述提升气缸固定在所述连接长板上且与所述顶升托板相连接,所述顶升部固定设置在所述顶升托板的上方且位于所述物料翻转支架的下方,所述提升气缸的两侧各设置有一个直线轴承,所述直线轴承内穿设有导向柱,所述导向柱的下端与所述顶升托板相连接,所述提升气缸能通过所述顶升托板驱动所述顶升部向上运动以将翻转至水平状态的物料翻转支架上的物料顶出至所述物料翻转支架外。
16.优选地,所述顶升部包括托板连接部和相对设置的两个顶升侧板,两个顶升侧板分别连接在所述托板连接部的两侧;
17.物料翻转支架包括垂直设置的第一侧挡板和物料放置板,所述物料放置板的两端与所述第一侧挡板连接,所述物料放置板与所述翻转轴连接,所述物料放置板上设置有多个能放置物料的容纳放置槽,同一竖直基架的两个所述竖直边框之间还设置有第二侧挡板,所述旋转气缸带动所述物料翻转支架翻转至水平状态时,所述物料放置板位于所述第一侧挡板和所述第二侧挡板之间且所述物料放置板与所述第一侧挡板和所述第二侧挡板之间均设置有允许所述顶升侧板穿过的空隙;
18.所述提升气缸能通过所述顶升托板驱动所述顶升侧板向上运动至所述物料放置板两侧以将翻转至水平状态的物料翻转支架上的物料向上顶出至所述容纳放置槽外。
19.优选地,所述水平推送机构包括无杆气缸、推块和推送部,所述无杆气缸固定在所述竖直基架上,所述推块与所述无杆气缸连接,所述推块与所述推送部之间通过l型板连接,所述推送部上设置有两个开口朝下的能避让所述顶升侧板的缺口,所述无杆气缸能通过所述推块带动所述推送部水平运动以将通过所述物料顶升机构顶出的物料推送至所述物料传送机构上。
20.优选地,所述物料传送机构包括传送气缸、物料接盘和固定挡板,所述传送气缸的第一端固定在两个所述竖直基架之间,所述固定挡板固定在所述传送气缸第二端的底部,所述物料接盘与所述传送气缸相连接,所述水平推送机构能将通过所述物料顶升机构顶出的物料推送至所述物料接盘内,所述物料接盘沿所述传送气缸第一端至第二端的方向逐渐向下倾斜设置,所述物料接盘上靠近所述传送气缸第二端的端部设置有通槽,所述通槽内转动设置有转动板,所述转动板为竖直状态时所述转动板上部凸出于所述通槽设置以阻挡所述物料接盘上的物料滑落,所述传送气缸驱动所述物料接盘向靠近第二端的方向移动时,所述转动板能与所述固定挡板抵接且所述固定挡板能使竖直状态的所述转动板转动至倾斜状态以使所述转动板的上部倾斜至所述通槽内。
21.本实用新型提供的翻转顶升传送装置,包括机架及其上的夹爪驱动机构、夹爪机构、翻转机构、物料顶升机构、水平推送机构和物料传送机构,夹爪驱动机构与夹爪机构连接且能驱动夹爪机构水平运动或上下运动至预定的位置,夹爪机构抓取物料后能通过夹爪驱动机构移动至物料翻转支架上方,物料翻转支架与翻转机构连接且能在翻转机构的驱动下翻转到水平状态或竖直状态,物料顶升机构用于将翻转至水平状态的物料翻转支架内的物料向上顶出至物料翻转支架外,水平推送机构能沿水平方向将顶出的物料推送至物料传送机构上,最后再通过物料传送机构把物料传送到下一个工位。解决了来料姿态与装配时姿态角度不一致的问题,避免了使用夹爪机器人带来的成本,空间和安全上的考虑,整个翻转顶升传送过程更加安全、高效、简洁、方便。
附图说明
22.为了更清楚地说明本实用新型实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
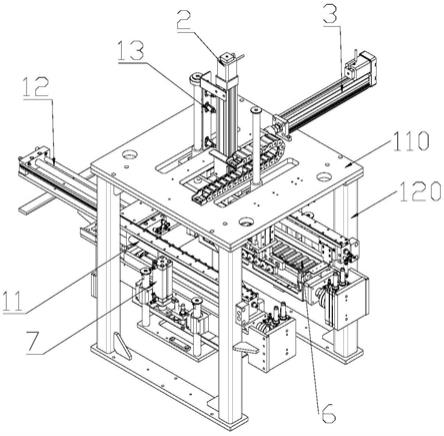
23.图1是本实用新型实施例提供的翻转顶升传送装置的第一张结构示意图;
24.图2是本实用新型实施例提供的翻转顶升传送装置的第二张结构示意图;
25.图3是本实用新型实施例提供的翻转顶升传送装置的侧视图;
26.图4是本实用新型实施例提供的翻转顶升传送装置的俯视图;
27.图5是本实用新型实施例提供的夹爪机构的结构示意图;
28.图6是本实用新型实施例提供的水平推送机构的结构示意图;
29.图7是图6中a部分的放大图;
30.图8是本实用新型实施例提供的物料顶升机构的结构示意图。
31.附图标记:1、机架;110、水平基架;1101、第一避让槽;1102、第二避让槽;120、竖直基架;1201、竖直边框;1202、水平边框;2、竖直运动电缸; 3、水平运动电缸;4、夹爪机构;41、夹爪组件;42、夹紧松开气缸;43、气缸安装板;44、竖直板;45、水平连接板;46、滑块;47、导轨;48、直线轴承;49、导向连杆;5、旋转气缸;6、物料翻转支架;61、第一侧挡板;62、物料放置板;63、第二侧挡板;7、提升气缸;8、顶升部;9、顶升托板;10、导向柱;11、水平推送机构;111、无杆气缸;112、推块;113、推送部;1131、缺口;12、物料传送机构;121、传送气缸;122、物料接盘;123、固定挡板; 124、转动板;13、竖直位移传感器。
具体实施方式
32.为使本实用新型的目的、技术方案和优点更加清楚,下面将对本实用新型的技术方案进行详细的描述。显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所得到的所有其它实施方式,都属于本实用新型所保护的范围。
33.参见图1~图8,本实用新型提供了一种翻转顶升传送装置,包括机架1及其上的夹爪驱动机构、夹爪机构4、翻转机构、物料顶升机构、水平推送机构 11和物料传送机构12,夹爪驱动机构与夹爪机构4连接且能驱动夹爪机构4 水平运动或上下运动至预定的位置,夹爪机构4抓取物料后能通过夹爪驱动机构移动至物料翻转支架6上方,物料翻转支架6与翻转机构连接且能在翻转机构的驱动下翻转到水平状态或竖直状态,物料顶升机构用于将翻转至水平状态的物料翻转支架6内的物料向上顶出至物料翻转支架6外,水平推送机构11 能沿水平方向将顶出的物料推送至物料传送机构12上,物料传送机构12用于将物料传送至下一个工位上。
34.机架1包括竖直基架120和水平基架110,两组竖直基架120相对设置于水平基架110的下方,每组竖直基架120至少包括相对设置的两个竖直边框 1201和连接在竖直边框1201上方的水平边框1202,水平基架110的两端与对应的水平边框1202可拆卸连接。两个竖直基架120侧各设置有一组物料翻转支架6,两组翻转支架各连接一个翻转机构且两组物料翻转支架6独立工作。相应的,在两个竖直基架120侧各设置一个物料顶升机构和一个水平推送机构11。
35.夹爪驱动机构包括竖直运动电缸2和水平运动电缸3,竖直运动电缸2和水平运动电缸3均与夹爪机构4相连接。夹爪机构4设置在两个竖直基架120 中间的位置。
36.具体的,参见图5,夹爪机构4包括位于机架1下方的夹爪组件41、夹紧松开气缸42、气缸安装板43和水平运动电缸3连接部,其中,水平运动电缸3 与水平运动电缸3连接部相连接,水平运动电缸3连接部位于气缸安装板43 的上方,水平运动电缸3连接部通过直线轴承48连接组件与气缸安装板43连接,竖直运动电缸2自上而下依次穿过机架1和水平运动电缸3连接部与气缸安装板43相连接,两个夹紧松开气缸42分别固定在气缸安装板43两端的底部,夹紧松开气缸42与夹爪组件41相连接,通过夹紧松开气缸42控制夹爪组件 41的夹紧和松开动作。
37.水平运动电缸3连接部包括竖直板44、水平连接板45和导轨47滑块46 结构,水平连接板45位于气缸安装板43的上方,竖直板44连接在水平连接板 45的上方且竖直板44的部分区段穿出机架1与设置在机架1上方的水平运动电缸3连接,导轨47滑块46结构的导轨47固定在机架1的底部,水平连接板 45与导轨47滑块46结构的滑块46连接,滑块46与导轨47滑动连接。
38.直线轴承48连接组件包括导向连杆49和直线轴承48,水平连接板45的两端分别设置有一个直线轴承48,导向连杆49的下端与气缸安装板43固定,导向连杆49的自由端向上穿出直线轴承48和机架1,竖直运动电缸2能通过气缸安装板43带动导向连杆49在直线轴承48内沿竖直方向运动。
39.如图4所示,在水平基架110上开设有第一避让槽1101和第二避让槽1102,两个第二避让槽1102分别位于第一避让槽1101的两侧,竖直运动电缸2和竖直板44能穿过第一避
让槽1101且能在第一避让槽1101内水平移动,两个导向连接分别通过对应的第二避让槽1102穿出且能在第二避让槽1102内水平移动。
40.翻转机构包括旋转气缸5、翻转轴、第一安装侧板和第二安装侧板,第一安装侧板和第二安装侧板分别固定设置在同一竖直基架120的两个竖直边框 1201上,旋转气缸5与第一安装侧板相连接,翻转轴的一端与旋转气缸5连接,翻转轴的另一端与第二安装侧板连接,翻转轴与物料翻转支架6连接,旋转气缸5能通过翻转轴带动物料翻转支架6绕水平轴线转动。
41.参见图8,物料顶升机构包括提升气缸7、顶升部8和顶升托板9,顶升机构通过连接长板设置在同一竖直基架120的两个竖直边框1201上,提升气缸7 固定在连接长板上且与顶升托板9相连接,顶升部8固定设置在顶升托板9的上方且位于物料翻转支架6的下方,提升气缸7的两侧各设置有一个直线轴承 48,直线轴承48内穿设有导向柱10,导向柱10的下端与顶升托板9相连接,提升气缸7能通过顶升托板9驱动顶升部8向上运动以将翻转至水平状态的物料翻转支架6上的物料顶出至物料翻转支架6外。顶升托板9上还设置有油压缓冲器,使得顶升部8顶升到预定位置时更加平稳。
42.其中,顶升部8包括托板连接部和相对设置的两个顶升侧板,两个顶升侧板分别连接在托板连接部的两侧;物料翻转支架6包括垂直设置的第一侧挡板 61和物料放置板62,物料放置板62的两端与第一侧挡板61连接,物料放置板 62与翻转轴连接,物料放置板62上设置有多个能放置物料的容纳放置槽,同一竖直基架120的两个竖直边框1201之间还设置有第二侧挡板63,旋转气缸5 带动物料翻转支架6翻转至水平状态时,物料放置板62位于第一侧挡板61和第二侧挡板63之间且物料放置板62与第一侧挡板61和第二侧挡板63之间均设置有允许顶升侧板穿过的空隙;提升气缸7能通过顶升托板9驱动顶升侧板向上运动至物料放置板62两侧以将翻转至水平状态的物料翻转支架6上的物料向上顶出至容纳放置槽外。另外,本实施例还在物料翻转支架6上设置了物料防外翻机构,如图7所示,物料防外翻机构包括铰接板、钢丝绳和配重轴,第一侧挡板61沿其长度方向的两侧各铰接有一个铰接板,两个铰接板的上端连接有钢丝绳,两个铰接板的下端连接有配重轴,物料翻转支架6转动至水平状态时,物料防外翻机构随之转至竖直状态,也就是铰接板竖直放置,钢丝绳位于上方来防止物料翻转支架6内的工件外翻。
43.结合图7和图8,水平推送机构11包括无杆气缸111、推块112和推送部 113,无杆气缸111固定在竖直基架120上,推块112与无杆气缸111连接,推块112与推送部113之间通过l型板连接,推送部113上设置有两个开口朝下的能避让顶升侧板的缺口1131,无杆气缸111能通过推块112带动推送部113 水平运动以将通过物料顶升机构顶出的物料推送至物料传送机构12上。
44.参见图4,本实施例中的物料传送机构12包括传送气缸121、物料接盘122 和固定挡板123,传送气缸121的第一端固定在两个竖直基架120之间,固定挡板123固定在传送气缸121第二端的底部,物料接盘122与传送气缸121相连接,水平推送机构11能将通过物料顶升机构顶出的物料推送至物料接盘122 内,物料接盘122沿传送气缸121第一端至第二端的方向逐渐向下倾斜设置,物料接盘122上靠近传送气缸121第二端的端部设置有通槽,通槽内转动设置有转动板124,转动板124为竖直状态时转动板124上部凸出于通槽设置以阻挡物料接盘122上的物料滑落,传送气缸121驱动物料接盘122向靠近第二端的方向移动时,转
动板124能与固定挡板123抵接且固定挡板123能使竖直状态的转动板124转动至倾斜状态以使转动板124的上部倾斜至通槽内,保证物料接盘122上的物料顺利滑落至下一个工位。
45.结合图1和图5,夹爪组件41包括相对设置的两个夹持主体,夹持主体与夹紧松开气缸42连接,两个夹持主体上相对设置的一侧都间隔设置有多个夹持部,夹持主体上设置有能放置夹持部的安装槽,夹持部上位于安装槽内的一侧连接有弹性元件,夹持部能在对应的安装槽内伸缩,并且本实施例中的夹持部采用塑料材质制成,能更好的保护物料不受破坏。
46.此外,本实用新型提供的翻转顶升传送装置还包括水平位移传感器、竖直位移传感器13和plc,水平位移传感器和竖直位移传感器13均与plc连接,其中,水平位移传感器设置了四个且四个水平位移传感器间隔固定在水平基架 110的底部,用来感应水平连接板45的位置,并能将水平连接板45的位置信息传送给plc,plc控制水平运动电缸3工作。四个竖直位移传感器13间隔固定设置在竖直运动电缸2上,plc与竖直运动电缸2电连接,竖直位移传感器 13能感应导向连杆49的位置并能将导向连杆49的位置信息传送给plc,plc 控制竖直运动电缸2运动。本实施例中一系列气缸和电缸的动作和反馈过程都是通过plc自动化控制来实现的,提高了翻转顶升传送过程的效率,保证来料在不同姿态入料过程中更加安全高效。
47.以上,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本实用新型揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应以权利要求的保护范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。