1.本实用新型属于机械传动技术领域,涉及一种能够自动改变总传动比的无级变速传动装置,具体的说是涉及一种在输入端以不同功率输入时,输出端根据负载转速
‑
扭矩特性自动调节输出转速实现等功率输出,当负载阻力发生变化时,自动调节输出转速以使输出与输入功率相等的变速传动装置。
背景技术:
2.传统齿轮传动装置,其传动比固定,因柴油机、电动机等输入源特性与负载特性不能重合,因此只能在设计工况才能发挥动力输入源的高效率。而在实际运用中大量存在非设计点运行工况,导致动力源效率下降,能耗增加。
3.现有机械无级变速传动装置,除了动力输入源之外需要外加调节装置对输出的转速、扭矩进行调节控制,这些外加调节装置会损耗一部分能量,降低传动效率。外加调节装置人为调节变速装置输出的转速
‑
扭矩特性,使输出的转速
‑
扭矩特性不能与负载的转速
‑
扭矩要求完全符合,导致总体效率下降。同时外加调节装置会增加整个传动装置的复杂程度和制作精度,也往往不适用相对大功率无级变速传动。因此,设计出一种无级变速机械传动装置来满足输出的转速
‑
扭矩自动适应负载需求显得尤为重要。
技术实现要素:
4.本实用新型的目的是针对现有纯机械变速器不能自动改变总传动比,不能根据负载转速
‑
扭矩特性自动调节输出端转速,无法实现等功率无级变速输出的不足,提出一种输出自适应负载特性的纯机械无级变速传动装置,仅通过齿轮传动,不需要额外增加调速装置,结构简单,在输入端功率变化和负载阻力变化情况下,自动改变装置总传动比,使输出端转速和扭矩可作自适应负载转速
‑
扭矩特性的自动调节,可使动力源始终运行在高效率区,传动性能稳定,可方便的实现纯机械无级变速。
5.本实用新型的技术方案:一种输出自适应负载特性的纯机械无级变速传动装置,包括装置箱体;其特征在于:所述变速传动装置由双行星传动机构和行星架——输出轴传动机构组成;
6.所述双行星传动机构由输入轴、输入中心轮、输入行星轮、行星轮轴、输出行星轮、输出中心轮、输出轴和行星架构成;所述输入轴与所述输入中心轮的中心连接固定,所述输入中心轮与输入行星轮形成外啮合传动连接,所述输出中心轮与输出行星轮形成外啮合传动连接,所述输出轴与输出中心轮连接固定,所述输入行星轮通过行星轮轴与输出行星轮同轴连接固定;
7.所述行星架——输出轴传动机构由行星架啮合轮、中间传动齿轮一、中间传动齿轮轴一、中间传动齿轮二、中间传动齿轮三、中间传动齿轮轴二、输出轴啮合中心轮、输出轴和行星架构成;所述行星架啮合轮同轴固定在所述行星架上,所述行星架啮合轮与所述中间传动齿轮一形成外啮合传动连接,所述中间传动齿轮一通过传动齿轮轴一与所述中间传
动齿轮二同轴连接固定,所述中间传动齿轮二与所述中间传动齿轮三形成外啮合传动连接,所述中间传动齿轮轴二连接固定在中间传动齿轮三的中心,所述输出轴啮合中心轮与中间传动齿轮三形成外啮合传动连接;
8.所述双行星传动机构和行星架——输出轴传动机构共用行星轮轴、行星架和输出轴,所述输入轴、输出轴和行星架回转中心同轴设置,所述行星架的中心固定设有行星架轴承,所述输出轴穿过行星架轴承后,一端与所述输出中心轮连接固定,另一端与所述输出轴啮合中心轮连接固定,所述行星架的周向上固定设有行星轮轴承,所述行星轮轴与所述行星轮轴承的内圈连接固定,所述输入轴、输出轴、中间传动齿轮轴一、中间传动齿轮轴二与设置在装置箱体上的轴承形成转动连接,所述输入行星轮、输出行星轮在自转运动的同时,并与所述行星架构成整体后绕行星架的中心进行公转。
9.所述行星架公转转向与输出轴转向必须相反;当行星架——输出轴传动机构总传动比i≥1时,双行星传动机构总传动比必须是1/(1 i);当行星架——输出轴传动机构总传动比i<1时,双行星传动机构总传动比必须是1/(1 1/i)。
10.所述双行星传动机构中输入中心轮、输出中心轮为外啮合齿轮或内啮合齿圈;输入轴与输出轴之间的转向是通过在输入中心轮、输入行星轮之间或输出行星轮、输出中心轮之间增加惰轮形成相同或相反转向。
11.所述行星架——输出轴传动机构在行星架啮合轮、不少于一个中间传动齿轮及输出轴啮合中心轮的共同作用下,确保行星架公转转向与输出轴转向相反;行星架啮合轮为外啮合齿轮或内啮合齿圈。
12.所述行星架——输出轴传动机构上任一传动环节都可作为传动装置的输出构件,除输出轴外的其它传动环节输出除影响传动装置的总传动比外,不影响整个传动装置的功能。
13.所述输入行星轮、输出行星轮不少于2组,并周向均布在行星架上。
14.所述中间传动齿轮一、中间传动齿轮二、中间传动齿轮三均不少于2组,且均围绕输出轴周向均布在传动装置箱体上。
15.本实用新型的有益效果为:本实用新型提出的一种输出自适应负载特性的纯机械无级变速传动装置,本实用新型可以自适应改变总传动比,当输入端由输入转速、输入扭矩各自发生变化或同时发生变化导致输入功率变化时,输出端会自动调整输出转速和扭矩到负载特性曲线上与输入功率相等那个点对应的转速和扭矩;当输入功率不变,负载扭矩发变化时,装置为会自动调整输出转速,使输出功率等于输入功率。整个装置均为齿轮传动,结构简单,制造成本低,性能稳定,传输功率大,应用范围广,易于推广。
附图说明
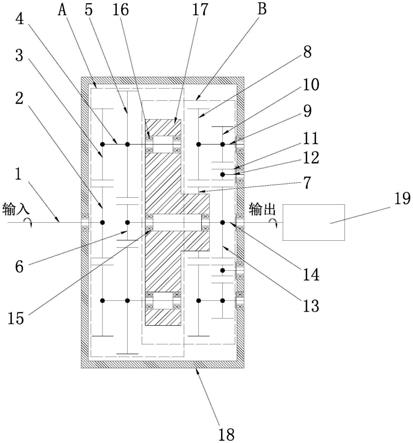
16.图1 为本实用新型中行星架啮合轮为外啮合状态结构示意图。
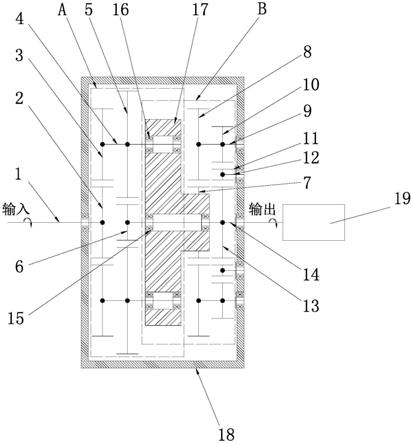
17.图2 为本实用新型中行星架啮合轮为内啮合状态结构示意图。
18.图中:双行星传动机构a、行星架——输出轴传动机构b、由输入轴1、输入中心轮2、输入行星轮3、行星轮轴4、输出行星轮5、输出中心轮6、行星架啮合轮7、中间传动齿轮一8、中间传动齿轮轴一9、中间传动齿轮二10、中间传动齿轮三11、中间传动齿轮轴二12、输出轴啮合中心轮13、输出轴14、行星架轴承15、行星轮轴承16、行星架17、装置箱体18、负载19。
具体实施方式
19.下面结合附图和实施例对本实用新型作进一步说明:
20.实施方式一:行星架啮合轮为齿轮外啮合;
21.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,传动装置由双行星传动机构机构a、行星架——输出轴传动机构b、装置箱体18构成。双行星传动机构由输入轴1、输入中心轮2、输入行星轮3、行星轮轴4、输出行星轮5、输出中心轮6、输出轴14和行星架17构成,输入轴1与输入中心轮2连接固定,输入中心轮2与输入行星轮3形成外啮合传动连接,输出轴14与输出中心轮6连接固定,输出中心轮6与输出行星轮5形成外啮合传动连接;行星架——输出轴传动机构b由行星架17、行星架啮合轮7、中间传动齿轮一8、中间传动齿轮轴一9、中间传动齿轮二10、中间传动齿轮三11、中间传动齿轮轴二12、输出轴啮合中心轮13、输出轴14构成,行星架17与行星架啮合轮7连接固定,行星架啮合轮7与中间传动齿轮一8形成外啮合传动连接,中间传动齿轮一8、中间传动齿轮二10与中间传动齿轮轴一9连接固定,中间传动齿轮三11与中间传动齿轮轴二12连接固定,中间传动齿轮二10与中间传动齿轮三11形成外啮合传动连接,输出轴14与所述输出轴啮合中心轮13连接固定,输出轴啮合中心轮13与中间传动齿轮三11形成外啮合传动连接。双行星传动机构a和行星架——输出轴传动机构b共用行星轮轴4、行星架17和输出轴14。输入轴1、输出轴14和行星架17回转中心设置在同一轴线上。行星轮轴4通过行星轴——行星架轴承16与行星架17转动连接,行星轮轴4均布设置在行星架17的周向上;输出轴14通过输出轴——行星架轴承15与行星架17转动连接。输入行星轮3和输出行星轮5同轴同速,同时与行星轮轴4连接固定;输出中心轮6和输出轴啮合中心轮13同轴同速,同时与输出轴14连接固定。输入轴1、输出轴14、中间传动齿轮轴一9、中间传动齿轮轴二12通过轴承固定在传动装置箱体18上并自由转动;输入行星轮3、输出行星轮5在自转的同时,与行星架17作为整体可围绕行星架17回转中心进行公转。
22.如图1所示,行星架啮合轮与中间传动齿轮一8的传动比是1,中间传动齿轮二10与输出轴啮合中心轮13的传动比是2,即行星架——输出轴传动机构b的总传动比i是2;输入中心轮2与输入行星轮3的传动比是1,输出行星轮5与输出中心轮6的传动比是1/3,即双行星传动机构a的总传动比是1/3,等于1/(1 i)。
23.如图1所示,双行星传动机构a中输入中心轮2、输出中心轮6是外啮合齿轮;双行星传动机构a中输入轴1和输出轴14转向相同。行星架——输出轴传动机构b通过行星架17与输出轴14之间行星架啮合轮7、中间传动齿轮一8、中间传动齿轮二10、中间传动齿轮三11、输出轴啮合中心轮13共同作用使行星架17公转转向与输出轴14转向相反;行星架——输出轴传动机构b中行星架啮合轮7采用外啮合齿轮;行星架——输出轴传动机构b总传动大于1;输出轴14为本传动装置传动输出构件;输入行星轮3、输出行星轮5设置为2组,并在行星架17周向均布;中间传动齿轮一8、中间传动齿轮轴一9、中间传动齿轮二10、中间传动齿轮三11、中间传动齿轮轴二12设置为2组,围绕输出轴14在装置箱体18上周向均布。
24.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,当输入轴1有功率w
输入
=q
输入
×
n
输入
输入时,因行星架——输出轴传动机构b中中间传动齿轮轴一9、中间传动齿轮轴二12、固定在传动装置箱体18上,使得整个传动装置不可能作整体旋转。输入扭矩q
输入
通过双行星传动机构a分作两股,第一股经输入轴1、输入中心轮2、输入行星轮3、行星轮
轴4、输出行星轮5、输出中心轮6驱动输出轴14旋转,第二股经输入轴1、输入中心轮2、输入行星轮3、行星轮轴4驱动行星架17作与输出轴14方向相反的旋转。行星架17作与输出轴14方向相反的旋转又通过行星架——输出轴传动机构b,经行星架啮合轮7、中间传动齿轮一8、中间传动齿轮二10、中间传动齿轮三11、输出轴啮合中心轮13驱动输出轴14旋转,且驱动方向与输出中心轮6驱动方向相同。因行星架——输出轴传动机构b强制行星架17、输出轴14按传动比i同时作相反方向的旋转,第一股扭矩和第二股扭矩同时通过输出中心轮6、输出轴啮合中心轮13汇合到输出轴14上形成输出扭矩。
25.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,行星架——输出轴传动机构b总传动比i是2,大于1,双行星传动机构a总传动比为1/3,输入轴1输入功率w
输入0
=q
输入0
×
n
输入0
会首先倾向于输出轴14转速n
输出
=n
输入0
,行星架17反向公转转速n
公转
=2
×
n
输入0
,由功率守恒可知w
输入0
=q
输入0
×
n
输入0
=q
输出
×
n
输出
q
公转
×
n
公转
,行星架17公转q
公转
仅仅克服摩擦阻力和润滑阻力,可以忽略不计,则q
输入0
×
n
输入0
=q
输出
×
n
输出
,因n
输入0
=n
输出
,故q
输入0
=q
输出
。因传动装置输出转速与负载转速一致,即n
输出
=n
负载
,此时负载扭矩q
负载
若大于q
输入
,则传动装置不能启动;若q
负载
等于q
输入
,则传动装置进入平衡,我们称此时n
输出
为n
输入0
转速输入下的最小输出转速n
最小输出0
,n
公转
为n
输入0
转速输入下的最小公转转速n
最小公转0
,此时的q
输出
为q
输入0
扭矩输入下的最大输出扭矩q
最大输出0
;若q
负载
小于q
输出
,多余的扭矩会驱动输出轴14加速旋转(同时也驱动行星架17作与输出轴14方向相反的加速),输出轴14加速旋转也就是负载转速加速。随着传动装置输出转速增加,根据功率守恒原理传动装置输出扭矩相应减少;随着负载转速增加,负载扭矩如是增加、不变、或负载扭矩减少的速率小于传动装置输出扭矩减少的速率三种情况,传动装置输出扭矩与负载扭矩都趋于相同。当此种状态变化到负载扭矩与输出扭矩相等时,传动装置进入最初均衡状态,即均衡状态0。此时的输出转速n
输出0
>n
最小输出0
,输出扭矩q
输出0
<q
最大输出0
,且在忽略装置摩擦阻力和润滑阻力的前提下w
输入0
=q
输入0
×
n
输入0
=q
输出0
×
n
输出0
=w
输出0
,q
输出0
=q
负载0
。
26.由上可知,传动装置运行同时必须具备的前提条件是:(1)传动装置的输出转速必须大于等于最小输出转速n
最小输出
;(2)在最小输出转速n
最小输出
时,最大输出扭矩q
最大输出
须大于或等于负载特性曲线上与最小输出转速n
最小输出
对应的负载扭矩q
负载
;(3)在负载特性曲线上转速大于等于最小输出转速n
最小输出
的部分有与输入功率相等的功率点,且此功率点与最小输出转速n
最小输出
对应功率点之间负载特性曲线连续且光滑。
27.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,在传动装置达到均衡0稳定状态后,第一种变化:q
输入0
不变,n
输入0
增加,变为n
输入1
,n
输入1
>n
输入0
,则n
最小输出1
等于n
输入1
。假设负载特性是扭矩随转速上升而上升,输入扭矩不变输入转速增加经传动装置会转变为输出转速和输出扭矩同时增加,因传动装置输出转速与负载转速相同,负载的转速和扭矩将沿着负载特性曲线增加,当传动装置输出功率(负载吸收功率)等于输入功率时传动装置达到均衡1稳定状态。此时在忽略装置摩擦力的前提下w
输入1
=q
输入0
×
n
输入1
=q
输出1
×
n
输出1
=w
输出1
,输出扭矩q
输出1
=q
负载1
,q
输出1
>q
输出0
,输出转速n
输出1
>n
输出0
,同时n
输出1
≥n
最小输出1
,若n
输出1
<n
最小输出1
,装置停止运行。若q
输入0
不变,n
输入0
减少,反之亦然。
28.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,在传动装置达到均衡0稳定状态后,第二种变化:n
输入0
不变,q
输入0
增加,变为q
输入2
,q
输入2
>q
输入0
,则n
最小输出2
不变仍等于n
输入0
。假设负载特性是扭矩随转速上升而上升,输入扭矩增加输入转速不变经传动
装置会转变为输出转速和输出扭矩同时增加,因传动装置输出转速与负载转速相同,负载的转速和扭矩将沿着负载特性曲线增加,当传动装置输出功率(负载吸收功率)等于输入功率时传动装置达到均衡2稳定状态。此时在忽略装置摩擦力的前提下w
输入2
=q
输入2
×
n
输入0
=q
输出2
×
n
输出2
=w
输出2
,输出扭矩q
输出2
=q
负载2
,q
输出2
>q
输出0
,输出转速n
输出2
>n
输出0
,同时n
输出2
≥n
最小输出2
,若n
输出2
<n
最小输出2
,装置停止运行。若q
输入0
减少,n
输入0
不变,反之亦然。
29.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,在传动装置达到均衡0稳定状态后,第三种变化:n
输入0
增加,变为q
输入3
,q
输入3
>q
输入0
,同时n
输入0
增加,变为n
输入3
,n
输入3
>n
输入0
,则n
最小输出3
等于n
输入3
。假设负载特性是扭矩随转速上升而上升,输入扭矩和输入转速同时增加经传动装置又转变为输出转速和输出扭矩同时增加,因传动装置输出转速与负载转速相同,负载的转速和扭矩将沿着负载特性曲线增加,当传动装置输出功率(负载吸收功率)等于输入功率时传到装置达到均衡3稳定状态。此时在忽略装置摩擦力的前提下,w
输入3
=q
输入3
×
n
输入3
=q
输出3
×
n
输出3
=w
输出3
,输出扭矩q
输出3
=q
负载3
,q
输出3
>q
输出0
,输出转速n
输出3
>n
输出0
,同时n
输出3
≥n
最小输出3
,若n
输出3
<n
最小输出3
,装置停止运行。若q
输入0
减少,同时n
输入0
减少,反之亦然。
30.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,在传动装置达到均衡0稳定状态后,第四种变化:q
输入0
不变,n
输入0
不变,负载扭矩q
负载
增加,为q
负载4
,则n
最小输出4
不变仍等于n
输入0
。假设负载特性是扭矩随转速上升而上升,因q
负载4
增加使q
输出0
小于q
负载4
,输出扭矩小于负载扭矩会导致传动装置输出转速减少,由功率守恒可知输出转速减少会增加传动装置输出扭矩,当输出扭矩增加到等于负载扭矩q
负载4
时,装置达到均衡4稳定状态。此时在忽略装置摩擦阻力和润滑阻力的前提下w
输入0
=q
输入0
×
n
输入0
=q
输出4
×
n
输出4
=w
输出4
,输出扭矩q
输出4
>q
输出0
,输出转速n
输出4
<n
输出0
,也同时n
输出4
≥n
最小输出4
,若n
输出4
<n
最小输出4
,装置停止运行。若q
输入0
不变,n
输入0
不变,负载扭矩q
负载
减少,反之亦然。
31.如图1所示,一种输出自适应负载特性的纯机械无级变速传动装置,在传动装置达到均衡0稳定状态后,其它变化,只要输入工况和输出工况满足前述传动装置运行同时必须具备的3个前提条件,传动装置就能达到新的均衡状态运行。
32.实施方式二:行星架啮合轮为齿圈内啮合;
33.如图2所示,一种输出自适应负载特性的纯机械无级变速传动装置,行星架——输出轴传动机构总传动比i小于1,是1/2,与行星架——输出轴传动机构总传动比i大于等于1不同的是:最小输出转速n
最小输出
等于2
×
n
输入
,行星架最小公转转速n
最小公转
等于输入转速n
输入
且与输出轴转向相反。实施原理与实施方式一相同。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。