脚铲
1.相关申请的交叉引用
2.本技术要求2019年2月25日提交且题为“foot shovel”的美国临时申请no.62/810,020的优先权,该申请通过引用以其整体并入本文。
技术领域
3.本公开总体上涉及一种铲,更具体地涉及一种包括踏板启动的提升和释放机构的铲及其使用方法。
背景技术:
4.铲雪可能涉及背部、肩部和上身的剧烈弯曲和抬起,并可能导致肌肉拉伤或导致其它严重伤害。在某些情况下,手动移动、提升和投掷载荷的体力消耗可能会增加个体心脏骤停和心脏衰竭的风险,因为移动可能导致个体血压和心率的急剧增加。此外,与腿部相比,这种涉及手臂的用力可能会对个人身体造成更大的压力,更有可能导致血压和心率飙升。通常,血压和心率的这种突然而剧烈的增加可能比在跑步机上锻炼更严重。寒冷的温度和条件可能还会增加个人在艰苦的铲雪活动中受伤的风险,因为冷空气会收缩血管,减少心脏接收的氧气量,并且通常会导致个人的肌肉和关节紧绷。
5.美国国家儿童医院的一项研究发现,1990年至2006年间,有1647人死于铲雪导致的心脏相关伤害,相当于平均每年100人死亡。包括密歇根的william beaumont医院的预防心脏病和心脏康复主任在内的其他人估计这个数字可能会高得多。美国心脏协会已经警告了铲雪对健康的危害,并且metrohealth已建议即使是推一个重的吹雪机的行为也会增加除雪过程中受伤的风险。
6.虽然铲雪是可能导致健康并发症的剧烈活动的一个示例,但这些风险可能与移动载荷时可能发生的任何弯腰、举起、投掷、搬运、握持或上身的其它剧烈活动有关,并且这些活动的风险可能因寒冷条件而加剧。
7.因此,需要一种铲具,其减少背部、肩部和上身的用力,而是将该用力重新引导到不容易由于突然运动而出现并发症的身体区域,比如脚、腿和下身。
技术实现要素:
8.公开了一种脚铲。在一个实施例中,脚铲可以包括踏板启动的提升和释放机构。在一个实施例中,脚铲可以包括具有第一端部和第二端部的本体、设置在本体的第一端部处的基座(该基座包括至少一个被构造成允许脚铲横向移动的构件)、设置在本体的第二端部处的把手、设置成接收并保持载荷的铲片以及多杠杆致动机构。多杠杆致动机构可以被构造成通过第一力将铲片提升到提升位置,并且可以通过第二力将铲片旋转到释放位置。
9.在一个实施例中,多杠杆致动机构可以包括狭槽和杆。当脚铲从静止位置移动到提升位置时,杆可以从狭槽中的起始点移动到狭槽中的停止点。当杆在狭槽中移动时以及当脚铲从静止位置移动到提升位置时,多杠杆致动机构可以将铲片保持在非竖直位置。当
杆撞击停止点并且脚铲从提升位置向释放位置移动时,多杠杆致动机构可以将铲片旋转到竖直位置。
10.在一个实施例中,多杠杆致动机构可以包括具有第一端部和第二端部的第一组臂。第一组臂可以在第一可旋转点处锚定到基座,并且该第一端部可以用作多杠杆致动机构的致动器。多杠杆致动机构可以进一步包括具有第一端部和第二端部的第二组臂。第二组臂的第一端部可以在第二可旋转点处锚定到基座上。在一个实施例中,第一组臂的第二端部可以用作第二组臂的可滑动导向件。在一个实施例中,第一组臂的第二端部可以与第二组臂上的狭槽可滑动地接合。多杠杆致动机构可以进一步包括具有第一端部和第二端部的第三组臂。第三组臂的第一端部可以在第三可旋转点处锚定到第一组臂的第二端部。第二端部可以包括狭槽。多杠杆致动机构可以进一步包括具有第一端部和第二端部的第四组臂。第四组臂的第一端部可以在第四可旋转点处锚定到第二组臂的第二端部。第四组臂可以与第三组臂的狭槽可滑动地接合。铲片可以锚定到第四组臂。
11.在一个实施例中,当脚铲从静止位置向提升位置移动时,第一组臂可以被构造成围绕第一可旋转点旋转,第二组臂可以被构造成围绕第二可旋转点旋转,第三组臂可以被构造成围绕第三可旋转点旋转,第四组臂可以被构造成围绕第四可旋转点旋转,并且第四组臂可以被构造成滑动经过狭槽到达停止点。
12.在一个实施例中,当脚铲从静止位置移动到提升位置时,第四组臂可以保持大致平行于地面。第四组臂可以被构造成在脚铲从提升位置向释放位置移动时围绕停止点旋转。当脚铲从提升位置向释放位置移动时,第四组臂可以旋转到大致垂直位置。
13.在一个实施例中,可以通过手动施加在第一组臂的第一端部上的下向力来致动多杠杆致动机构。在一个实施例中,本体可以在角度上是可调节的。在一个实施例中,被构造成允许脚铲横向移动的至少一个构件可以是滑动构件。在一个实施例中,被构造成允许脚铲横向移动的至少一个构件可以是轮。在一个实施例中,铲片可以是可拆卸的和可互换的。
14.在一个实施例中,脚铲可以包括踏板启动的提升和释放机构,并且包括具有本体和把手的框架、可操作地附接到本体的基座(该基座包括被构造成允许脚铲横向移动的至少一个构件)、被构造成接收并保持载荷的铲片、以及包括至少一组可旋转臂、滑动构件和狭槽的多杠杆致动机构,其中滑动构件与狭槽可滑动地接合。
15.在一个实施例中,当脚铲从静止位置移动到提升位置时,滑动构件可以滑动通过狭槽到达停止点,并且滑动构件可以在停止点处使铲片旋转,以将铲从提升位置移动到释放位置。
附图说明
16.通过结合以下图示参考以下详细描述可以更好地理解本教导,图示中:
17.图1a
‑
1c示出了包括踏板启动的提升和释放机构以及可拆卸铲片的脚铲的实施例的各种视图;
18.图2a
‑
2b是具有角度可调节的本体的脚铲的侧视图;
19.图3
‑
5示出了处于静止位置的脚铲的实施例的各种视图;
20.图6是在静止位置和提升位置之间转换的脚铲的实施例的透视图;
21.图7是处于提升位置的脚铲的实施例的透视图;
22.图8是在提升位置和释放位置之间转换的脚铲的实施例的透视图;
23.图9是在提升位置和释放位置之间转换的脚铲的实施例的透视图;
24.图10是处于释放位置的脚铲的实施例的透视图;
25.图11是在提升位置和释放位置之间转换的脚铲的实施例的局部侧视图;
26.图12a和图12b是包括至少一个滑动构件和可选择性延伸的轮的脚铲的基座的各种实施例的侧视图和顶视图;
27.图13是具有可互换铲片的脚铲的透视图;并且
28.图14
‑
17示出了脚铲的实施例的各种视图,该脚铲包括具有第二狭槽的踏板启动的提升和释放机构。
具体实施方式
29.现在将详细参考本教导的示例性实施例,其示例在附图中示出。应该明白的是,还可以采用其它实施例,并且可以做出结构和功能上的变化,而不背离本教导的相应范围。另外,各个实施例的特征可以被组合或变更,而不背离本教导的范围。如此,以下描述仅通过说明方式给出,并且不应该以任何方式限制可对于所示实施例做出的并且仍然处于本教导的精神和范围内的各种替代方案和修改方案。在本公开中,许多具体细节提供了对本主题公开的透彻理解。应该明白的是,本公开的各方面可以用不一定包括本文所描述的所有方面等的其它实施例来实践。
30.如本文中使用的,词语“示例”和“示例性”意指实例或例证。词语“示例”或“示例性”不指示关键或优选的方面或实施例。除非上下文另有说明,否则词语“或”旨在是包含性的而非排他性的。作为一个示例,表述“a采用b或c”包括任何包容性组合(例如,a采用b;a采用c;或a采用b和c)。作为另一方面,冠词“一”和“一个”通常旨在意指“一个或更多个”,除非上下文另有说明。
31.此外,除非上下文另有说明,对形状的描述(例如圆形、矩形、三角形等)是指符合这些形状定义的形状以及这些形状的大体呈现。例如,三角形形状或大致三角形形状可包括具有三条边和三个顶点的形状或大致呈三角形的形状,比如具有三条主边(其可以具有或不具有直边)的形状、具有圆形顶点的类三角形形状等。
32.虽然实施例可能涉及所描述的用于雪地应用的脚铲的特定示例,但是应当注意的是所公开的实施例可以适用于各种其它物件、产品和行业。所描述的实施例可以用于需要重新定位载荷(比如雪、泥土、岩石、沙子、混凝土等)的任何应用。例如,脚铲和/或踏板启动的提升和释放机构可用于建筑、工业、个人应用等。脚铲可以通过手动或电子致动来使用,并且可以适于在任何规模的应用中使用。
33.一些装置需要用户在铲雪时推动和提升铲,严重依赖个人的上身,包括他们的背、肩和臂。一些铲使用大铲片来移动更多量的雪。然而,这增加了铲的重量,并且需要用户更加努力地工作。当用户继续铲的时候,他们可能会用力过度、过热、或者在铲的时候有负面的身体体验,比如血压或心率突然飙升。反复提升和推雪可能会导致身体紧张,并且在某些情况下,可能会导致受伤。寒冷的条件可能会加剧伤害,或者使个人更容易受到某些伤害。寒冷条件可能在铲雪时导致血管收缩并引发心脏事件。
34.公开了一种包括踏板启动的提升和释放机构的脚铲。脚铲可以允许载荷(比如雪、
泥土、岩石、沙子、混凝土等)的重新定位,同时最小化背部、肩部和上身的用力。脚铲却可以将用力重新引导到身体的一个区域,该区域可能不太容易由于突然运动而出现并发症和劳损,比如脚、腿和下身。踏板启动的提升和释放机构可以包括一系列杠杆、臂和轴,其将脚铲从脚铲可以获得载荷的静止状态转换到允许载荷移动到期望位置的提升状态,最后转换到载荷从脚铲释放的释放状态。踏板启动的提升和释放机构可以转换回静止状态,以重复重新定位的过程。踏板启动的提升和释放机构可以通过用户的脚的踏步运动来致动。
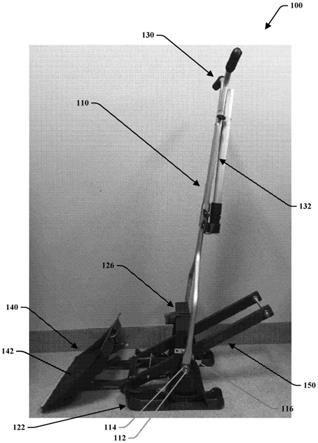
35.图1a
‑
1c示出了脚铲100。脚铲100通常可以包括本体110、基座120、把手130、铲片140和致动机构150。脚铲100可以允许移动或铲取材料,而减小对用户的压力。如本文所述,当铲片140处于静止位置时,脚铲100可以在铲片140中获取材料,脚铲100可以机械地提升和移动铲片140以移动材料并将材料释放到期望的其它位置,铲片140可以机械地返回静止位置以反复移除材料,比如车道、人行道或道路上的雪。致动机构可以包括一系列集成杠杆,以便于脚铲100的提升和释放机构。
36.脚铲100的本体110可以联接到基座120。本体110可以例如通过轴112和紧固机构(比如螺栓114)铰接地或可旋转地附接到基座120。在一个实施例中,本体110可以包括伸长的框架部分,该框架部分分叉成至少两个附接部分,并且附接部分可以骑跨并附接到基座120的相对侧。在一个实施例中,轴112可以横穿基座120的宽度,并且轴112的每个端部可以可操作地联接到附接部分,并联接到轴112的每个端部上的至少一个螺栓114。在一个实施例中,脚铲100可包括多于一个的轴112,其可操作地联接到附接部分和至少一个螺栓114。在一个实施例中,本体110或其附接部分可以包括接收构件,比如孔眼,其接收基座120的轴112。轴112可以通过螺栓114固定或锁定就位。尽管轴112和螺栓114在本文中被描述为有助于脚铲100的本体110和基座120之间的附接,但是应当注意的是,可以使用任何合适的附接方式,包括铰链、可旋转附接件或锁、通道锁、卡接锁、摩擦配合连接、紧固件、磁体等。
37.本体110可以是在角度上可调的,如图1
‑
2部分地所示。在一个实施例中,本体110可绕轴112自由旋转。在一个方面,止动件116可用于限制角向旋转,并防止本体110在任何方向延伸太远。如图1
‑
2所示,止动件116可用于本体110的任一侧,以限制本体110向前或向后方向的角向旋转。止动件116可以包括物理止动件,比如阻挡或中断本体110的旋转路径的突起或突出物。注意,可以使用其它止动件,比如磁性止动件、电动止动件、机械止动件等。在一个示例中,止动件116可以允许用户向前搁置本体110,而本体110在释放时不会掉落到地面,如图2b所示,或者止动件116可以允许用户以另一个角度(比如向后的角度)搁置本体110,以防止本体110在释放时掉落到地面,如图1a所示。止动件116可用于根据用户的需要选择性地将本体110锁定在任何特定的角度。止动件116可以在使用或不用脚铲的过程中将本体110保持在某个角度,并且可以防止本体110掉落到不希望的角度,比如掉落到地面,这将需要用户弯曲和取回本体。注意,基座120可以类似地被调节以操纵脚铲100的角度。
38.本体110可以在高度上是可调节的。调节本体110的高度可以适应用户的使用偏好,例如基于用户的高度,可以有助于存储、运输、使用等的便利性。在一个实施例中,本体110的高度可以通过本体110的框架的伸缩构件来调节,该伸缩构件可以以各种长度延伸、缩回和锁定。在一个实施例中,本体110可以包括改变本体110高度的可插入和可移除的附接件。在一个实施例中,脚铲100可以包括具有不同长度的多个本体110框架或其部分,其可
以基于本体110的期望高度互换。注意,基座120可以类似地被调节以操纵脚铲100的高度。
39.脚铲100的基座120可以包括至少一个构件122,其被构造成允许脚铲100的横向移动。在一个实施例中,并且如图1
‑
11所示,基座120可以包括滑动构件122,比如一个或更多个滑板(例如一个、两个、三个等),其允许脚铲100移动一段距离。在一个实施例中,基座120可以包括至少一个轮124,其允许脚铲100移动一段距离。在一个实施例中,脚铲100的基座120可以包括滑动构件122和可选择性延伸的轮124。例如,如图12a所示,轮124可以搁置在基座120上处于非使用位置。当轮124处于非使用位置时,用户可以依靠滑动构件122来实现脚铲100的运动。
40.当用户希望使用轮124时,轮124可以在基座120的端部上弹性地延伸到基座120下方的可使用位置,如图12a所示。基座120也可以打开和关闭,以将轮124从非使用位置转换到可使用位置,如图12b所示。除了以上这些示例之外,可以利用轮124的任何其它选择性附接,包括选择性地将轮附接到基座下的配合构件。在一些实施例中,滑动构件122可以包括连续履带系统、链式轮胎或其它装置,以帮助在雪、冰或其它困难的地形中移动。此外,实施例可以利用任何数量的滑动构件122和不同类型的滑动构件122的组合。
41.基座120可以进一步包括附接到基座120的灯126。灯126可以包括led或其它光源。灯126可以包括电源。电源可以包括可充电电源、一次性电源等。在一些实施例中,电源可以仅向灯126供电,例如定位在光源之中或附近的电池,或者向灯126和其它部件供电。例如,脚铲100的一些实施例可以包括电子马达,其可以可操作地提升和释放铲片140、驱动滑动构件122或轮124等等。
42.脚铲100的铲片140可以包括容纳载荷的接收部分142。铲片140可以为任何期望的形状和尺寸。铲片140可以是正方形、长方形、三角形、凹形、铲形、截头圆锥形、u形铲片、v形铲片、箱式犁形铲片、直犁形铲片等,并且可以为任何尺寸。例如,铲片140可以是主要设计成用于推动(例如推土机铲片形状)、提升、承载特定尺寸的载荷或用于其组合的形状。在一个实施例中,铲片140通常可以包括雪铲铲片的形状。铲片140可以是从脚铲100可拆卸的。铲片140可以从脚铲100可拆卸,以便储存、更换、维护,或者与相同或不同的铲片互换。例如,铲片140可以与不同尺寸和形状的附加附接件互换。图13示出了一替代附接铲片的示例。铲片140可以经由铰链、可旋转附接件或锁、通道锁、卡接锁、摩擦配合连接件、紧固件、磁体等附接到脚铲100。
43.在另一方面,当铲片140处于向下或静止位置时,铲片140可以包括设置在地面附近的铲片或切削刃。切削刃可以包括金属材料(例如钢、铝等),其成形为刮冰或其它碎片、切穿岩石、泥土或崎岖地形等。在一个实施例中,铲片140或脚铲100的其它部件(比如滑道构件122)可以包括加热元件以切开雪、冰或其它碎片。加热元件可以包括或联接到电源,比如电池、电力干线、燃气马达等。加热元件可以使用空气活化或结晶来向周围环境产生热量。加热元件可以是一次性的或多次使用的。在一个实施例中,脚铲100可以包括盐分配机构。当脚铲100行进时,盐分配机构可以操作地分配盐。这可以减少用户在外面花费的时间量,并提供额外的安全措施。
44.脚铲100的把手130可以经由紧固件、销、夹、磁体等选择性地附接到脚铲100。把手130可以包括用以改变其长度的机构。例如,把手130可以包括伸缩管或可互换部件。把手130可以包括任何期望的握把尺寸和形状。如图1
‑
2所示,把手130可以包括具有两个把手的
单个支柱。替代地,把手130可以包括单个支柱,比如由附接把手132所示,或者在两个支柱之间具有把手,比如用于割草机的把手。把手130可以选择性地可附接到本体110。把手130可以与不同尺寸和形状的附接件是可互换的。
45.如图1
‑
2所示,脚铲100可以包括附接把手132。附接把手132可以包括大致管状或其它适当形状的把手。附接把手132可以包括用以改变其长度的机构,比如伸缩管,并且可以经由紧固件、销、夹、磁体等选择性地附接到脚铲100的本体110。附接把手132可以与脚铲100的把手130互换。附接把手132或它的其它变型可以改变把手的长度、握把尺寸和握把的定位、把手的类型,例如条、单杆、分支双把手等。注意,当附接把手132不使用时,附接把手132可以定位或存放在本体110上,如图1
‑
2所示。附接把手132可以联接到本体110用于存储。附接把手132可以延伸或改变把手130的范围。附接把手132可以经由紧固件、销、夹、磁体等附接到本体110。在至少一个实施例中,附接把手132和铲片140可以从本体110拆下,并可操作地附接在一起,以形成标准的手动铲。
46.脚铲100的致动机构150可以包括多杠杆致动机构。例如,多杠杆致动机构150的一个实施例在图3
‑
11中示出。多杠杆致动机构250的另一个实施例显示在图14
‑
17中。致动机构150可包括多个可移动构件,其经由铲片140实现载荷的提升和释放。可移动构件可包括多个固定的和可旋转的臂、轴、枢转点或杠杆,其能够在致动器或踏板152上施加第一力时机械提升载荷,并且在致动器或踏板152上施加第二力时释放载荷。当第一力或第二力停止或不再施加时,致动机构可以返回到静止或加载位置。提升和释放机构可以由手动力致动,比如由用户的脚致动,或者提升和释放机构可以由例如电马达或气动马达自动化。注意,用户的脚可以包括假肢,并且手动力也可以由用户的手或其它附肢来驱动。在一个实施例中,致动可以是语音激活的。
47.在一个实施例中,脚铲100可以包括第一组臂160。第一组臂160可以包括第一端部162和第二端部164,例如参见图5。第一组臂160可以沿着第一组臂160的长度在点166处附接到基座120。点166可以作为第一组臂160的支点。在实施例中,点166可以包括轴168,第一组臂160围绕该轴旋转。当力施加在第一组臂160上时,该第一组臂可以用作致动机构的致动构件。在一个实施例中,第一组臂160的第一端部162可以包括踏板169,由此力(比如用户的脚)可以向下压在踏板169或第一端部162上,导致第一组臂160围绕由附接到基座120的点166限定的支点旋转,并且提升第一组臂160的第二端部164以进一步接合提升和释放机构的剩余部分,比较图5
‑
11。
48.在一个实施例中,脚铲100可以进一步包括第二组臂170。第二组臂170可以包括第一端部172和第二端部174。第二组臂170的第一端部172可以在点176处附接到基座120。点176可以作为第二组臂170的支点。在实施例中,点176可以包括轴178,第二组臂170围绕该轴旋转。第二组臂可以选择性地搁置在位于第一组臂160的第二端部164上的轴188上。第一组臂160的第二端部164可以作为第二组臂170的导向件,使得当第一组臂160围绕其与基座120的连接点166限定的轴线旋转时,第一组臂160的第二端部164向上滑动第二组臂170并向上提升第二组臂170。当第一组臂160的第二端部164向上提升时,第二组臂170可以围绕由其附接点176(在第一端部172和基座120之间)限定的轴线旋转,比较图5
‑
11。如本文所述,在脚铲200的另一个实施例中,第二组臂可以包括与第一组臂的第二端部可滑动地接合的狭槽,参见图14
‑
17。
49.在一个实施例中,脚铲100可以进一步包括第三组臂180。第三组臂180可以包括第一端部182和第二端部184。第三组臂180的第一端部182可以在点186处附接到第一组臂160的第二端部164。点186可以作为第三组臂180的支点。在实施例中,点186可以包括轴188,第三组臂180围绕该轴旋转。虽然附图将第三组臂180的旋转轴188示出为与第二组臂170可以搁置的轴188相同,但是应当注意的是这些轴可以是不同的。第三组臂180的第二端部184可以包括狭槽189,以进一步接合提升和释放机构的剩余部分,比较图5
‑
11。
50.在一个实施例中,脚铲100可以进一步包括第四组臂190。第四组臂190可以包括第一端部192和第二端部194。第四组臂190的第一端部192可以在点196处附接到第二组臂170的第二端部174。点196可以作为第四组臂190的支点。在实施例中,点196可以包括轴198,第四组臂190围绕该轴旋转。第四组臂190可以在第三组臂180的狭槽189内的点199处附接到第三组臂180。第四组臂的第二端部194附接到脚铲100的铲片140上。
51.作为示例,当第一组臂160围绕由它与基座120的附接点166限定的轴线旋转时,并且当第二端部164向上滑动第二组臂170时,提升第二组臂170,第三组臂180的第二端部184和第四组臂190上的附接点199之间的开槽附接件189移动,使得第三组臂180向上移动,第四组臂190保持与地面大致水平,同时围绕第二组臂170的附接点196旋转。在提升运动期间,附接到第四组臂190的铲片140能够保持大致水平于地面,如图5
‑
7所示,其示出了当力(未示出)向下施加到第一组臂的第一端部162上时,脚铲100从静止位置到提升位置的行进。
52.如图5
‑
7所示,在图5的静止位置,第四组臂190上的附接点199保持在第三组臂180的第二端部184的狭槽189的一侧。当从静止位置开始提升时,第四组臂190上的附接点199移动穿过狭槽189,如图6所示,到达狭槽186的另一端,如图7所示。狭槽189的端部用作提升机构的自然止动件。
53.第一组臂160可在其与基座120的附接点166处锁定就位,以防止进一步向下旋转回到静止位置或进一步向上旋转到脚铲100的释放位置。根据需要,致动机构150可以被其它机构锁定并且处于致动机构150中的其它点。例如,第一组臂160、第二组臂170、第三组臂180和/或第四组臂190可以被锁定机构单独地或共同地锁定。致动机构150在其通过致动前进时也可以自动锁定,使得用户可以在任何时候停止施力,并且致动机构150将保持就位。然后,用户可以重新建立力并继续进行致动,或者进行释放,其可以使致动机构150回到静止位置。当被锁定时,可以不需要附加力来保持致动机构150的位置。例如,用户可以自由地用脚铲100行走一段距离,同时将载荷保持在提升位置。
54.当需要时,用户可以解锁致动机构150或继续前进以将致动机构带到提升位置,如图7
‑
11所示。一旦第四组臂190上的附接点199穿过第三组臂180的第二端部184的狭槽189,到达其在狭槽189端部的自然停止点,附加力可以施加到第一组臂160的第一端部162上。该附加力可以继续提升第一组臂160的第二端部164以及第二组臂170和第三组臂180。此时,第四组臂190可以在第四组臂190的第一端部192和第二组臂170的第二端部174之间的附接点196处开始旋转,从而限定轴线。如图7
‑
11所示,当第四组臂190可以围绕由它与第二组臂170的附接所限定的点196旋转时,铲片140(未示出)可以从如图7所示的大致水平位置过渡到如图10所示的大致竖直位置,以释放保持在铲片140中的载荷。在一个实施例中,当第一组臂160的第一端部162或踏板将到达地面时,铲片140和第四组臂190可以变得大致竖直。
55.一旦载荷被释放,用户可以停止施加在第一组臂160的第一端部162或踏板169上的力,并且致动机构150可以回复到静止位置。可以根据需要重复致动机构150的上述转换。尽管上面描述了包括四组臂的致动机构,但是应当注意的是任何数量的臂都可以是足够的,包括一、二、三、四、五、六、七、八等组臂。在一个实施例中,脚铲100的致动机构150通常可以是用以提升保持在铲片140中的载荷的杠杆机构,以及用以释放保持在铲片140中的载荷的开槽杠杆机构。在将铲片140从静止位置提升到提升位置的第一次旋转过程中,杠杆机构150的一部分可以穿越或通行穿过狭槽189的长度直到停止点。在停止点,第二次旋转可开始导致铲片140旋转并释放载荷。
56.图14
‑
17示出了脚铲200的致动机构250的另一个实施例。脚铲200可以在其它方面与脚铲100相同或相似,并且可以包括本体210、基座220、把手230和铲片240以及本文中描述的与脚铲100相关的其它特征,比如被构造成允许脚铲200和致动器或踏板252横向移动的至少一个构件222。致动机构250可以包括多杠杆致动机构。
57.致动机构250可包括多个可移动构件,其经由铲片240实现载荷的提升和释放。可移动构件可包括多个固定的和可旋转的臂、轴、枢转点或杠杆,其能够在致动器或踏板252上施加第一力时机械提升载荷,并且在致动器或踏板252上施加第二力时释放载荷。当第一力或第二力停止或不再施加时,致动机构可以返回到静止或加载位置。提升和释放机构可以由手动力致动,比如由用户的脚致动,或者提升和释放机构可以由例如电马达或气动马达自动化。注意,用户的脚可以包括假肢,并且手动力也可以由用户的手或其它附肢来驱动。在一个实施例中,致动可以是语音激活的。
58.致动机构250可以包括第一组臂260、第二组臂270、第三组臂280和第四组臂290。在一个实施例中,脚铲200的把手230可以用作致动器,并且本体210可以用作第一组臂,该第一组臂然后附接到致动机构250的其它部件并与其相互作用。在一个实施例中,第一组臂260可以包括第一端部262和第二端部264。第一组臂260可以沿着第一组臂260的长度在点266处附接到基座220。点266可以作为第一组臂260旋转的支点。当力施加在第一组臂260上时,该第一组臂可以用作致动机构的致动构件。在一个实施例中,第一组臂260的第一端部262可以包括踏板269,由此力(比如用户的脚)可以向下压在踏板269或第一端部262上,导致第一组臂260围绕由附接到基座220的点266限定的支点旋转,并且提升第一组臂260的第二端部264以进一步接合提升和释放机构的剩余部分。
59.在一个实施例中,脚铲200可以进一步包括第二组臂270。第二组臂270可以包括第一端部272和第二端部274。第二组臂270的第一端部272可以在点276处附接到基座220。点276可以作为第二组臂270旋转的支点。第二组臂可以包括狭槽279。第一组臂260的第二端部264可以与第二组臂270的狭槽279滑动接合,使得当第一组臂260围绕其附接到基座220的点266所限定的轴线旋转时,第一组臂260的第二端部264滑动穿过第二组臂270上的狭槽279直到停止点并将第二组臂270向上提升。当第一组臂260的第二端部264向上提升时,第二组臂270可以围绕由其附接点276(在第一端部272和基座220之间)限定的轴线旋转。
60.在一个实施例中,脚铲200可以进一步包括第三组臂280。第三组臂280可以包括第一端部282和第二端部284。第三组臂280的第一端部282可以在点286处附接到第一组臂260的第二端部264。点286可以作为第三组臂280旋转的支点。第三组臂280的第二端部284可以包括狭槽289(未示出),以进一步接合提升和释放机构的剩余部分。注意,脚铲200中的第三
组臂280和第四组臂290通常可以与脚铲100中的第三组臂180和第四组臂190相同或相似,包括相同或相似的附接点和提升机构。在一个实施例中,脚铲200中的第三组臂280和第四组臂290与脚铲100中的第三组臂180和第四组臂190相同,包括相同的附接点和提升机构。
61.在一个实施例中,脚铲200可以进一步包括第四组臂290。第四组臂290可以包括第一端部292和第二端部294。第四组臂290的第一端部292可以在点296处附接到第二组臂270的第二端部274。点296可以作为第四组臂290旋转的支点。第四组臂290可以在第三组臂280的狭槽289内的点299(未示出)处附接到第三组臂280。第四组臂的第二端部294附接到脚铲100的铲片140上。
62.作为示例,为了从静止位置移动到提升位置,第一组臂260可以围绕由其附接到基座220的点266限定的轴线旋转,并且第二端部264可以滑动穿过第二组臂270上的狭槽279直到停止点,从而升起第二组臂270。第二组臂270、第三组臂280和第四组臂290之间的相互作用可以与本文中关于脚铲100所描述的相同,注意狭槽279涉及第一组臂260和第二组臂270之间的相互作用。
63.尽管本教导的实施例已经在附图中示出并且在前述详细描述中描述,但应该明白的是本教导并不仅仅局限于所公开的实施例,而是本文中描述的本教导能够进行许多重新配置、修改和替代,而不背离以下权利要求书的范围。如下的权利要求书旨在包括所有修改和变化,只要它们落入权利要求书或其等同方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

