1.本发明涉及煤矿开采技术领域,具体地,涉及一种定位试验台。
背景技术:
2.锚杆支护作为掘进工作面最重要的设备之一,它的自动化、智能化水平,对于实现掘进工作面无人化起着重要作用。
技术实现要素:
3.本发明是基于发明人对以下事实和问题的发现和认识做出的:
4.锚杆钻车在进行支护作业时,不具备机器视觉功能,无法实现全流程的自动锚杆支护作业,存在速度慢、精度低、维护不方便、可靠性差等多种问题,影响锚杆钻车的工作效率。
5.本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种反应速度快、控制精度高的定位试验台。
6.根据本发明实施例的定位试验台包括安装平台、大臂组件、视觉识别组件、微调组件和动力组件,所述大臂组件包括基座、模拟大臂、第一驱动件、第二驱动件和模拟钻架,所述基座与所述安装平台相连,所述模拟大臂的一端枢接在所述基座上,所述模拟大臂的另一端与所述模拟钻架枢接,所述第一驱动件的第一端与所述基座相连,所述第一驱动件的第二端与所述模拟大臂相连,所述第一驱动件可驱动所述模拟大臂枢转,所述第二驱动件的第一端与所述模拟大臂相连,所述第二驱动件的第二端与所述模拟钻架相连,所述第二驱动件用于驱动所述模拟钻架枢转,所述视觉识别组件与所述大臂组件相连,,所述视觉识别组件可自动寻找识别钢带孔的位置并计算输出所述钢带孔的位置坐标信息,所述微调组件设在所述大臂组件上且与所述视觉组件相连,所述微调组件接收所述视觉识别组件输出的位置信息并根据所述位置信息调整所述大臂组件的位置,所述动力组件与所述大臂组件和所述微调组件相连,以提供动力。
7.根据本发明实施例的定位试验台采用粗调系统、精调系统实现钻架大臂的精确定位,不需要人工辅助调节,提高了井下装备的自动化程度,具有反应速度快、控制精度高的特点。
8.在一些实施例中,所述定位试验台还包括模拟巷道,所述模拟巷道与所述安装平台相连,所述模拟巷道包括巷道台架、钢带、钢丝网和遮盖幕布,所述钢带设在所述巷道台架上,所述钢丝网和所述遮盖幕布均与所述钢带相连,所述钢带孔位于所述钢带上。
9.在一些实施例中,所述定位试验台还包括安装座,所述安装座与所述安装平台相连,所述基座包括回转立轴,所述安装座设有安装支耳,所述回转立轴穿设在所述安装支耳上,以使所述基座与所述安装座枢接。
10.在一些实施例中,所述定位试验台还包括第三驱动件,所述第三驱动件的一端与所述安装座枢接,所述第三驱动件的另一端与所述基座枢接,所述第三驱动件用于驱动所
述基座枢转。
11.在一些实施例中,所述视觉识别组件包括视觉传感器和控制器,所述视觉传感器用于捕捉视觉信号,所述控制器用于接收和发送所述视觉信号。
12.在一些实施例中,所述视觉识别组件还包括自动清洗器,所述自动清洗器与所述视觉传感器相连,以清洗所述视觉传感器。
13.在一些实施例中,所述微调组件包括第一微调座和第二微调座,所述第一微调座可沿第一方向调整所述模拟钻架位置,所述第二微调座可沿第二方向调整所述模拟钻架位置,所述第一方向平行于所述模拟巷道的宽度方向,所述第二方向平行于所述模拟巷道的长度方向。
14.在一些实施例中,所述微调组件还包括控制系统,所述控制系统分别与所述第一微调座和所述第二微调座相连,以控制所述第一微调座和所述第二微调座的移动。
15.在一些实施例中,所述控制系统为电液比例伺服系统。
16.在一些实施例中,所述动力组件为移动泵站。
附图说明
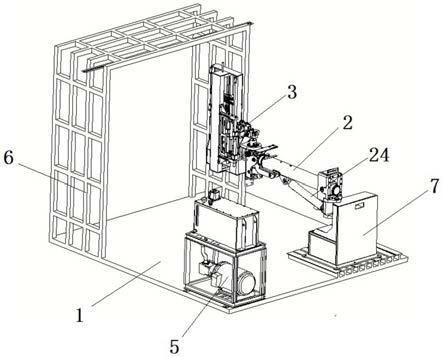
17.图1是根据本发明实施例的定位试验台的结构示意图。
18.图2是图1中定位试验台的俯视图。
19.图3是图1中大臂组件的结构示意图。
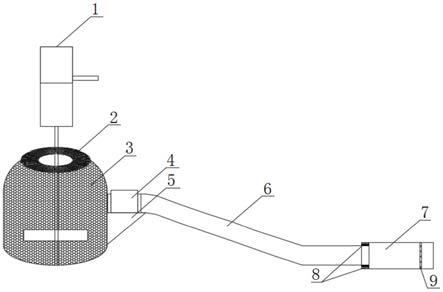
20.图4是图1中模拟钻架的结构示意图。
21.图5是图1中控制系统的原理图。
22.附图标记:
23.安装平台1,大臂组件2,基座21,回转立轴22,模拟大臂23,第一驱动件24,第二驱动件25,模拟钻架26,视觉识别组件3,微调组件4,动力组件5,模拟巷道6,巷道台架61,钢带62,安装座7,第三驱动件8。
具体实施方式
24.下面详细描述本发明的实施例,所述实施例的示例在附图中示出。下面通过参考附图描述的实施例是示例性的,旨在用于解释本发明,而不能理解为对本发明的限制。
25.下面参考附图1
‑
5描述根据本发明实施例的定位试验台。
26.根据本发明实施例的定位试验台包括安装平台1、大臂组件2、视觉识别组件3、微调组件4和动力组件5。
27.大臂组件2包括基座21、模拟大臂23、第一驱动件24、第二驱动件25和模拟钻架26,基座21与安装平台1相连,模拟大臂23的一端枢接在基座21上,模拟大臂23的另一端与模拟钻架26枢接,第一驱动件24的第一端与基座21相连,第一驱动件24的第二端与模拟大臂23相连,第一驱动件24可驱动模拟大臂23枢转,第二驱动件25的第一端与模拟大臂23相连,第二驱动件25的第二端与模拟钻架26相连,第二驱动件25用于驱动模拟钻架26枢转,视觉识别组件3与大臂组件2相连,视觉识别组件3可自动寻找识别钢带孔的位置并计算输出钢带孔的位置坐标信息,微调组件4设在大臂组件2上且与视觉组件相连,微调组件4接收视觉识别组件3输出的位置坐标信息并根据位置坐标信息调整大臂组件2的位置,动力组件5与大
臂组件2和微调组件4相连,以提供动力。
28.如图1
‑
4所示,在安装平台1上连接有基座21,基座21与模拟大臂23的后端相连,模拟大臂23的后端下方连接有第一驱动件24,模拟大臂23的前端连接有模拟钻架26,第一驱动件24为举升油缸,举升油缸将模拟大臂23在上下方向上举升,从而控制模拟钻架26在上下方向上的位置变化,模拟大臂23的前端和模拟钻架26之间连接有第二驱动件25,第二驱动件25为左右摆动油缸,通过左右摆动油缸的驱动,模拟钻架26在左右方向上摆动,在模拟钻架26上还设有视觉识别组件3,通过视觉识别组件3对目标钢带孔进行自动寻找定位,同时对寻找到的钢带孔进行定位处理,确定钢带孔的位置坐标,将位置坐标信息发送给微调组件4,通过微调组件4对模拟钻架26进行进一步调整,使模拟钻架26可正确对应钢带孔的位置,完成模拟大臂23的全自动对孔动作,同时模拟大臂23的上下摆动还可对模拟钻架26和视觉识别组件3进行振动测试。
29.根据本发明实施例的定位试验台采用粗调系统、精调系统实现钻架大臂的精确定位,不需要人工辅助调节,提高了井下装备的自动化程度,具有反应速度快、控制精度高的特点。
30.在一些实施例中,定位试验台还包括模拟巷道6,模拟巷道6与安装平台1相连,模拟巷道6包括巷道台架61、钢带62、钢丝网(图中未示出)和遮盖幕布(图中未示出),钢带62设在巷道台架61上,钢丝网和遮盖幕布均与钢带62相连,钢带孔位于钢带62上。
31.在安装平台1的上方还设有模拟巷道6,模拟巷道6通过巷道台架61构建巷道内部空间大小,在巷道台架61上设有钢带62、钢丝网和遮盖幕布,进一步模拟真实巷道内的光线环境,提高对模拟大臂23的试验真实度,更好地验证模拟大臂23的自动化程度。
32.在一些实施例中,定位试验台还包括安装座7,安装座7与安装平台1相连,基座21包括回转立轴22,安装座7设有安装支耳(图中未示出),回转立轴22穿设在安装支耳上,以使基座21与安装座7枢接。
33.如图1和图2所示,在安装平台1上还连接有安装座7,安装座7向上凸起,在安装座7的前侧面上设有两个安装支耳,基座21上设有回转立轴22,回转立轴22沿上下方向延伸且穿设在安装支耳上,从而将基座21连接在安装座7上,减少基座21枢转时的磨损,延长了模拟大臂23的使用寿命。
34.在一些实施例中,定位试验台还包括第三驱动件8,第三驱动件8的一端与安装座7枢接,第三驱动件8的另一端与基座21枢接,第三驱动件8用于驱动基座21枢转。
35.如图2所示,在安装座7上连接有第三驱动件8,第三驱动件8为伸缩油缸,伸缩油缸的伸缩端与基座21相连,伸缩油缸的固定端与安装座7相连,通过伸缩油缸的伸缩驱动基座21绕回转立轴22枢转,实现模拟大臂23的左右摆动。
36.在一些实施例中,视觉识别组件3包括视觉传感器(图中未示出)和控制器(图中未示出),视觉传感器用于捕捉视觉信号,控制器用于接收和发送视觉信号。
37.视觉传感器为摄像头,通过摄像头对钢带孔位置的视觉识别,捕捉钢带孔的位置信息,并将位置信息传输给控制器,控制器通过接收到的位置信息判断钢带孔的位置,并对模拟大臂23输出控制信号,控制模拟大臂23进行移动,完成模拟钻架26的位置调整,实现自动化识别和精确动作。
38.在一些实施例中,视觉识别组件3还包括自动清洗器(图中未示出),自动清洗器与
视觉传感器相连,以清洗视觉传感器。
39.巷道环境恶劣,具有粉尘和污水,为保证摄像头的视觉信息接收效果,在摄像头周围设置有自动清洗器,对摄像头进行自动清洗,自动清洗器为自动喷水装置,使用清水对摄像头进行清洗,防止粉尘影响摄像头的视觉信息捕捉,提高了定位精度。
40.在一些实施例中,微调组件4包括第一微调座(图中未示出)和第二微调座(图中未示出),第一微调座可沿第一方向调整模拟钻架26位置,第二微调座可沿第二方向调整模拟钻架26位置,第一方向平行于模拟巷道6的宽度方向,第二方向平行于模拟巷道6的长度方向。
41.如图3所示,模拟钻架26在左右方向上通过第一微调座进行摆动,模拟钻架26在前后方向上通过第二微调座进行位置调整,通过第一微调座和第二微调座的微调,使模拟钻架26的位置移动更加精准,提高了定位精度,缩短了定位时间,提高了作业效率。
42.在一些实施例中,微调组件4还包括控制系统(图中未示出),控制系统分别与第一微调座和第二微调座相连,以控制第一微调座和第二微调座的移动。控制系统依据视觉传感器获取的信息,做出决策,发出控制指令,执行元件动作目的性更强,避免了程序预先设定参数的盲目性。
43.在一些实施例中,控制系统为电液比例伺服系统。
44.如图5所示,控制系统主要采用电液比例伺服系统,使用方案选用电液伺服阀 电液伺服油缸,能够保证大臂定位机构各个关节动作精确准时,具有反应速度更快,控制精度更高的特点。
45.在一些实施例中,动力组件5为移动泵站。动力组件5为大臂组件2和微调组件4提供动力,为保证动力供给的充分和及时,采用移动泵站进行动力供给,具有动力强、精度高的特点。
46.在本发明的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”“内”、“外”、“顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
47.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本发明的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
48.在本发明中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接或彼此可通讯;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本发明中的具体含义。
49.在本发明中,除非另有明确的规定和限定,第一特征在第二特征“上”或“下”可以是第一和第二特征直接接触,或第一和第二特征通过中间媒介间接接触。而且,第一特征在第二特征“之上”、“上方”和“上面”可是第一特征在第二特征正上方或斜上方,或仅仅表示
第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”和“下面”可以是第一特征在第二特征正下方或斜下方,或仅仅表示第一特征水平高度小于第二特征。
50.在本发明中,术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本发明的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或多个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
51.尽管上面已经示出和描述了本发明的实施例,可以理解的是,上述实施例是示例性的,不能理解为对本发明的限制,本领域的普通技术人员在本发明的范围内可以对上述实施例进行变化、修改、替换和变型。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。