技术特征:
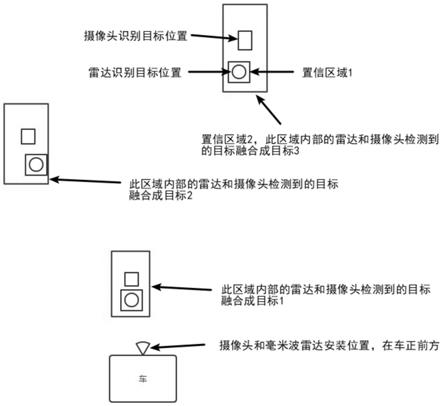
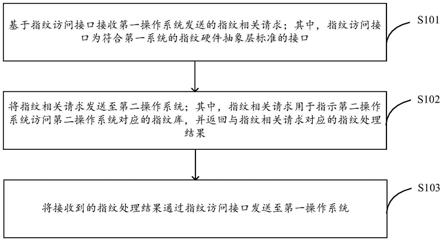
1.一种毫米波雷达与视觉识别目标的融合方法,其特征在于:包括以下步骤:获取多个第一目标点和多个第二目标点的数据信息,所述数据信息包括目标点的纵向距离信息和横向距离信息,其中纵向表示车辆的行进方向;所述第一目标点代表毫米波雷达传感器探测到的目标物,所述第二目标点代表摄像头探测到的目标物;以所述第一目标点为中心以设定的绝对阈值做纵向和横向扩展,形成第一置信区间;以所述第二目标点为中心以相对阈值做纵向扩展和横向扩展形成第二置信区间;所述相对阈值的大小是与第二目标点的距离和速度呈线性关系;执行km算法进行融合,将尽可能多的毫米波雷达探测到的第一目标点和摄像头探测到的第二目标点一对一关联为同一目标物:根据所述第一目标点、所述第二目标点的距离远近,由近及远,选取一个第一目标点和一个第二目标点进行比对;当所述第一目标点处于所述第二目标点的第二置信区间或所述第二目标点处于所述第一目标点的第一置信区间,则认为所述第一目标点和所述第二目标点是同一目标物。2.如权利要求1所述的毫米波雷达与视觉识别目标的融合方法,其特征在于:所述第一置信区间是以第一目标点(x
l
,y
l
)为中心,以r
δ
做纵向和横向扩展所在矩形区域。3.如权利要求1所述的毫米波雷达与视觉识别目标的融合方法,其特征在于:所述r
δ
的取值范围为0.3
‑
1米。4.如权利要求1所述的毫米波雷达与视觉识别目标的融合方法,其特征在于:所述第二置信区间是以第二目标点(x
c
,y
c
)为中心,以(x
min
,y
min
)、(x
max
,y
max
)为对角点的矩形区域,所述(x
min
,y
min
)、(x
max
,y
max
),通过如下公式获得:x
max
=x
c
x
δ
×
x
c
x
min
=x
c
‑
x
δ
×
x
c
y
max
=y
c
y
δ
×
y
c
y
min
=y
c
‑
y
δ
×
y
c
其中,x
δ
表示摄像头测距的x轴偏差百分比阈值;y
δ
表示摄像头测距的y轴偏差百分比阈值。5.如权利要求4所述的毫米波雷达与视觉识别目标的融合方法,其特征在于:所述x
δ
、y
δ
为常量,所述x
δ
为不小于在设定的测距区间的x轴偏差百分比测量值的最大值的某个值;所述y
δ
为不小于在设定的测距区间的y轴偏差百分比测量值的最大值的某个值。6.如权利要求4所述的毫米波雷达与视觉识别目标的融合方法,其特征在于:所述x
δ
、y
δ
的取值为变量,所述x
δ
、y
δ
的计算公式为:x
δ
=k1×
y
c
k3×
v c1y
δ
=k2×
y
c
k4×
v c2其中,y
c
为摄像头与目标的纵向距离,v表示当前车速,k1、k2、k3、k4、c1、c2为拟合系数。7.如权利要求1所述的毫米波雷达与视觉识别目标的融合方法,其特征在于:所述融合方法还包括:根据融合结果,将毫米波雷达探测到的该目标物的纵向距离、横向距离和速度、摄像头探测到的该目标物的类别组合作为该目标物的目标级数据信息。8.一种毫米波雷达与视觉识别目标的融合系统,其特征在于:包括毫米波雷达、摄像头和融合系统;所述融合系统同步接收所述毫米波雷达和所述摄像头探测到的目标物信息,并执行如权利要求1
‑
7任一项所述的毫米波雷达与视觉识别目标的融合方法,将所述毫米
波雷达探测的目标物和所述摄像头探测的目标物进行关联。
技术总结
本发明公开了一种毫米波雷达与视觉识别目标的融合方法和系统,所述方法包括:获取多个第一目标点和多个第二目标点的数据信息;所述第一目标点代表毫米波雷达传感器探测到的目标物,所述第二目标点代表摄像头探测到的目标物;以所述第一目标点为中心以设定的绝对阈值做纵向和横向扩展,形成第一置信区间;以所述第二目标点为中心以相对阈值做纵向扩展和横向扩展形成第二置信区间;所述相对阈值的大小是与第二目标点的距离和速度成线性关系;执行KM算法进行融合,将尽可能多的毫米波雷达探测到的第一目标点和摄像头探测到的第二目标点一对一关联为同一目标物。本方法可以提高目标融合效果,减少虚目标的产生。减少虚目标的产生。减少虚目标的产生。
技术研发人员:潘元承 王鸿源 沈定彬 林文山 林文畅 杨财有 庄进发 侯学锋 石添华 徐德强 张汝辉 林剑健 张文超
受保护的技术使用者:福建中科云杉信息技术有限公司
技术研发日:2021.08.26
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。