1.本发明属于港口设施技术领域,尤其涉及考虑前置和后置缓冲区的地面锁站智能动态布置方法。
背景技术:
2.近年来,港口行业尤其是涉及箱运输的港口行业,机械设备的智能化和柔性化程度不断提高。集装箱码头的高效率运营,并不能简单的依赖于固定的设备布置方式,港口设备应能够根据实际情况进行动态布置。这样才能有效提高港口的整体生产效率和生产力水平。目前,岸边集装箱的装卸船一系列工作过程中,在地面锁站的布置方式上,目前还没有能完全脱离固定布置方式,进行锁站智能布置及缓冲区动态调整。
3.在传统的岸边集装箱装卸船流程中,每台岸桥下配备固定数量的锁站,负责对集卡上等待装船的集装箱安装连接锁,或者对刚完成卸船的集装箱进行连接锁拆卸作业。在实际工作中,不同船舶尺寸要求不同锁站工作量,随着装卸量的增加,传统固定布置方案损耗的时间成本也相应增加,降低了生产效率。
4.因此,为了持续提高装卸船生产效率及设备利用率,开发一种考虑前置和后置缓冲区的地面锁站智能动态布置技术,具有必要。
技术实现要素:
5.本发明的目的是综合岸边集装箱起重装卸船的生产流程,考虑前置与后置缓冲区的设置,提出一种考地面锁站智能动态布置方法,此方案能够根据船型尺寸对模块化可移动的锁站数量及其位置进行确定,并根据实际各设备作业情况对内集卡进入锁站和缓冲区进行调度。
6.本发明是通过以下技术方案来实现的:
7.一种考虑前置和后置缓冲区的地面锁站智能动态布置方法,根据船型尺寸以及锁站布置要求对地面模块化的可移动的锁站数量及其位置进行确定,根据实际岸桥作业量动态调整锁站数量;对各个锁站的前置缓冲区及后置缓冲区进行布置,根据运输车辆与锁站距离、锁站作业车辆数据及预计到达岸桥时间进行前置缓冲区分配;根据实际作业情况对内集卡进入锁站和前置缓冲区进行调度,当某个锁站前置缓冲区得到释放时,对所有已分配前前缓冲区未到达的车辆自动计算,判断车辆进入当前释放的前前缓冲区是否更快及效率更高,若是则自动调整该车目标位置。
8.进一步地,所述锁站在船舶作业前根据船舶停靠位置布置在船舶作业对应区域,码头地面施划锁站定位标线,每5米一个刻度,用于解锁站定位;两座锁站之间间隔不小于54米、中心线距不小于72米。
9.进一步地,所述地面锁站数量及其位置的确定方法如下:
10.地面锁站位于舱盖区下方,两座解锁站之间间隔a为55m,锁站长度b为20m,船头及船尾与首尾锁站间隔c为35m;根据船型尺寸对锁站数量计算,锁站数量为(d
‑
c
‑
b)/(b a),
结果向下取整;同时,锁站布置数量满足岸桥作业需求为最高优先级,岸桥与锁站数量配置比例大约为1.5:1。
11.优选的,所述缓冲区分为进锁站前的前置缓冲区和出锁站后的后置缓冲区, 每个锁站正下方有6条车道,4米/条,包括4个缓冲区车道和2条超车道。
12.其中,4个缓冲区pb车道由车队管理系统调度、分配为qpb或hpb。各缓冲区对应锁站,进入锁站的车辆位于前置缓冲区等待,完成解锁的车辆进入前置缓冲区完成出站准备。
13.进一步地,所述前置缓冲区用于在进锁站之前调整装船时序或等待空闲锁站,此时未进行解挂锁,等待进入锁站作业;当前解锁站的前置缓冲区位于船头方向的上一个锁站缓冲区下方;所述后置缓冲区用于在锁站后调整装船次序,此时已完成解挂锁,等待进入岸桥下作业等待位;当前解锁站的后置缓冲区位于船头方向的后两个锁站缓冲区下方。
14.优选的,通过锁站、缓冲区分配策略则对装卸船作业内集卡进入前置缓冲区和锁站进行调度。所述锁站分配策略包括装船集卡的锁站选择和卸船集卡的锁站选择。所述卸船集卡的锁站选择没有作业顺序约束,可以考虑针对目标场区的繁忙程度进行对应调度;所述装船集卡的锁站选择,具体步骤包括实时计算与数据预处理。
15.进一步地,车辆在堆场装箱完成后,对前置缓冲区进行预选和二次选择,当某个锁站前置缓冲区得到释放时,对所有已分配前置缓冲区未到达的车辆自动计算,判断车辆进入当前释放的前置缓冲区是否更快及效率更高,若是则自动调整该车目标位置。
16.本发明的考虑前置和后置缓冲区的地面锁站智能动态布置方法,能够根据船型尺寸对锁站数量及其位置进行确定,并根据实际各设备作业情况对内集卡进入锁站和缓冲区进行调度,在满足岸桥作业顺序的前提下,尽可能最大化锁站的使用效率,减少缓冲区等待时间,提高装卸船总体的作业效率;注重高效工作的同时,兼顾自动化码头内资产设备的利用率提高。
附图说明
17.图1为本发明实施例提出的考虑前置和后置缓冲区的地面锁站智能动态布置方法的流程图;
18.图2为本发明实施例提出的考虑前置和后置缓冲区的地面锁站智能动态布置方法中运用的锁站组成图;
19.图3为本发明实施例提出的考虑前置和后置缓冲区的地面锁站智能动态布置方法的前置缓冲区以及后置缓冲区的布置图;
20.图4为本发明实施例提出的考虑前置和后置缓冲区的地面锁站智能动态布置方法的前置缓冲区的分配流程图;
21.图5为本发明实施例提出的考虑前置和后置缓冲区的地面锁站智能动态布置方法的前置缓冲区的调整流程图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他
实施例,都属于本发明保护的范围。
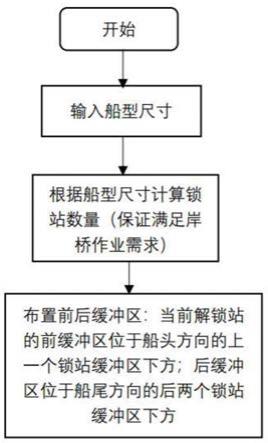
23.如图1所示,本发明提供的考虑前置和后置缓冲区的地面锁站智能动态布置方法,包括:根据船型尺寸以及锁站布置要求对地面锁站数量及其位置进行确定,根据实际岸桥作业量动态调整锁站数量;对各个锁站的前置缓冲区及后置缓冲区进行布置,根据运输车辆与锁站距离、锁站作业车辆数据及预计到达岸桥时间进行前置缓冲区分配;根据实际作业情况对内集卡进入锁站和前置缓冲区进行调度,当某个锁站前置缓冲区得到释放时,对所有已分配前前缓冲区未到达的车辆自动计算,判断车辆进入当前释放的前前缓冲区是否更快及效率更高,若是则自动调整该车目标位置。
24.本发明中,所述的考虑前置和后置缓冲区的地面锁站智能动态布置方法,根据船型尺寸对锁站数量及其位置进行确定,保证了锁站布置数量满足岸桥作业需求为最高优先级。
25.上述技术方案中,如图2所示,所述地面模块化的可移动的锁站由4个可移动安全岛及活动护栏组成,可以停放一辆art(artificial intelligence robot oftransportation,即人工智能运输机器人)进行解挂锁作业。所述锁站以模块化存在,易移动与布置。
26.上述技术方案中,如图3所示,所述锁站在船舶作业前根据船舶停靠位置布置在船舶作业对应区域,码头地面施划锁站定位标线,每5米一个刻度,用于锁站定位。两座锁站之间间隔不小于54米(中心线距不小于72米)。
27.上述技术方案中,如图3所示,所述地面锁站数量及其位置的确定,具体计算过程如下:
28.地面锁站位于舱盖区下方,两座解锁站之间规定间隔(a)为55m,锁站长度(b)为20m,船头及船尾与首尾锁站间隔(c)35m,根据船型尺寸(d)对锁站数量进行计算,锁站数量为:(d
‑
c
‑
b)/(b a),结果向下取整。
29.以10万吨级集装箱船为例,船舶总长为346m,锁站数量为:(346
‑
35
‑
20) /(20 55)≈3(向下取整)。同时,保证锁站布置数量满足岸桥作业需求为最高优先级,岸桥与锁站数量配置比例大约为:1.5:1,即配置4台岸桥进行装卸船作业,单岸桥每小时可对20辆内集卡进行装卸作业,即每小时可起吊40箱20 英尺集装箱,其中70%集装箱需要进行解挂锁作业,即每小时有:20
×4×
0.7=56 台集卡需要进行解挂锁作业,单集卡一次解锁时间为180s,解锁系统每小时可对(3600/180)
×
3=60辆集卡进行解挂锁作业,大于岸桥系统每小时作业量,满足岸桥系统作业需求。
30.上述技术方案中,如图3所示,所述缓冲区(pb),分为进锁站前的前缓冲区和出锁站后的后缓冲区,每个锁站正下方有6条车道(4米/条),其中4个缓冲区车道和2条超车道。4个pb车道由车队管理系统调度、分配为前缓冲区或后缓冲区。各缓冲区对应锁站,进入锁站的车辆位于前缓冲区等待,完成解锁的车辆进入后缓冲区完成出站准备。
31.上述技术方案中,如图3所示,所述的前缓冲区用于在进锁站之前调整装船时序或等待空闲锁站,此时还未进行解挂锁,等待进入锁站作业。当前解锁站的前缓冲区位于船头方向(进锁站反方向)的上一个锁站缓冲区下方,船头方向第一个锁站的前缓冲区位于掉头前的位置;后缓冲区用于在锁站后调整装船次序,此时已经完成解挂锁,等待进入岸桥下作业等待位。当前解锁站的后缓冲区位于船尾方向(进锁站反方向)的后两个锁站缓冲区下
方,船尾方向第一个锁站的后缓冲区位于垂直岸线的舱盖摆放区平心位置,在去岸桥的道路上。
32.上述技术方案中,如图4所示,通过锁站、缓冲区动态分配策略,对装卸船作业内集卡进入缓冲区和锁站进行调度。其中,所述锁站分配调度,包括装船集卡的锁站选择和卸船集卡的锁站选择。所述卸船集卡的锁站选择没有作业顺序约束,可以考虑针对目标场区的繁忙程度进行对应调度;所述装船集卡的锁站选择,具体步骤包括实时计算与数据预处理。
33.上述技术方案中,如图5所示,所述前缓冲区分配、动态调节,包括车辆在堆场装箱完成后,系统对前缓冲区进行预选和二次选择。所述选择前缓冲区分配原则考虑车辆与锁站距离、锁站作业车辆数据及预计到达岸桥时间;所述缓冲区调整原则为当某个锁站前缓冲区得到释放时,系统会对所有已分配前缓冲区未到达的车辆自动计算,车辆进入当前释放的前缓冲区是否更快,效率更高,若是则系统自动调整该车目标位置。
34.最后应当说明的是,上述实施例只是用于对本发明的举例和说明,而非意在将本发明限制于所描述的实施例范围内。此外本领域技术人员可以理解的是,本发明不局限于上述实施例,根据本发明教导还可以做出更多种的变型和修改,这些变型和修改均落在本发明所要求保护的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。