1.本发明属于图像识别领域,具体涉及一种基于图像识别的气体扩散层纤维测量方法。
背景技术:
2.图像识别技术是人工智能的一个重要领域。它是指对图像进行对象识别,以识别各种不同模式的目标和对像的技术。图像识别的发展经历了三个阶段:文字识别、数字图像处理与识别、物体识别。今天所指的图像识别并不仅仅是用人类的肉眼,而是借助计算机技术进行识别。图像识别分为生物识别、物体与场景识别和视频识别。其中生物识别包括指纹、掌形、眼睛、脸型等;物体与场景识别包括:签名、语音、行走的步态、击打键盘的力度等。图像识别是一个综合性的问题,涵盖图像匹配、图像分类、图像检索、人脸检测、行人检测等技术,并在互联网搜索引擎、自动驾驶、医学分析、遥感分析等领域具有广泛的应用价值。图像识别技术是未来科学技术发展的基础,将这种先进技术应用于科学研究,可有效提高工作效率。
3.气体扩散层是燃料电池重要组成部件,其内部纤维及分布特征对燃料电池性能有重要影响。专利cn111462035a公开了一种图片检索方法,包括检测图片中的所有直线,并筛选出符合预设条件的直线;根据筛选出的直线检测轮廓;根据所检测出的轮廓,在所述图片中确定目标区域。该专利能够通过检测出图片中的轮廓区域,并通过轮廓检测快速确定目标区域,然而该方法只能检测出图片中矩形框直线,无法识别图片中任意角度直线。
4.专利cn110738604a公开了一种基于canny算子和hough变换的大倾角证件图像自动矫正方法及系统,通过在对图像循环进行canny算子边缘检测、二值化和hough变换直线检测过程中,控制hough变换直线检测出的直线条数,找到canny算子合适的阈值;然后在canny算子边缘检测的二值化输出图像上进行轮廓检测,找到最大的轮廓并显示于另外一张图像进行直线检测;对直线进行筛选,找到方形证件的四条边,然后求交点得四个角点,最后进行透视变换得到输出结果图像。该专利在基于直线检测的基础上找角点的,使得方形证件由于部分反光无法形成完整边缘的情况得到有效避免,并且易于实现,应用效率高,但是该方法适用于存在角点的直线识别,对于单独存在的纤维直线识别难度很高。
5.专利cn111768423a公开了一种基于图像识别的纤维角度自动测量方法,通过调用python opencv2库中函数实现,包括以下步骤:采集玻璃纤维图像并对图像进行预处理;运用canny算子对预处理图像进行边缘检测、二值化处理;根据hough变换原理对二值化处理图像进行直线特征识别与提取,通过设置r、θ值的精度控制识别准确度,通过设置累加平面阈值参数控制检测直线数量,并输出极坐标系下直线的垂线与水平轴逆时针方向的夹角θ值;将θ值通过角度换算得到纤维与水平轴方向的夹角,按照夹角的取值范围分为纤维角度a和纤维角度b;分别对角度a和b求平均值并输出,实现对纤维角度的自动测量。该发明所述方法有效提高测量效率且操作简便、数据可靠。然而,该专利识别目标为玻璃棉纤维,气体扩散层纤维图像背景与目标更难分离,识别难度高。
6.综上,一种提取效果显着、操作简单的气体扩散层纤维测量方法急需被开发出来。
技术实现要素:
7.本发明的目的就是为了解决上述问题而提供一种基于图像识别的气体扩散层纤维测量方法,通过算法实现气体扩散层图像中纤维长度、角度等特征提取,该方法操作简单,测量出的数据准确可靠,有利于气体扩散层微观结构进一步研究。
8.本发明的目的通过以下技术方案实现:
9.一种基于图像识别的气体扩散层纤维测量方法,通过编写基于分块概率霍夫变换算法的初次投票及基于加权k
‑
均值算法的二次投票实现,具体包括以下步骤:
10.(1)采集气体扩散层sem图像进行预处理;
11.(2)将图像进行区域划分;
12.(3)运用canny算子对各个区域进行边缘提取;
13.(4)通过分块概率霍夫变换算法对边缘点进行随机“多对一”映射,根据预设值p初次投票映射出参数空间中的点;
14.(5)采用加权k
‑
均值算法对参数空间中的点根据预设值p二次投票并进行聚类分析,最终得到纤维数量、长度、角度结构特征。
15.所述纤维角度为图像水平轴到纤维之间逆时针方向的夹角,所述纤维长度为图像中纤维像素长度,通过图像比例可换算为纤维真实长度。
16.进一步的,所述气体扩散层图像是在扫描电镜下放大得到。
17.优选地,所述分块概率霍夫变换算法的初次投票通过以下方法得到:
18.(a)首先,在图像空间建立直角坐标系(x,y),并对x轴、y轴均匀划分,将坐标系分割为许多个大小相等的小区域;
19.(b)若图像大小不为小区域的整数,则将原始图像进行扩充,扩充部分的灰度值设置为0;
20.(c)建立一个动态窗口,窗口大小与每个小区域大小相同,对当前窗口中的小区域进行鉴别,若符合鉴别条件则进行步骤(d),否则窗口移动向下一个区域;
21.(d)将符合鉴别条件的区域中的所有边缘点进行两两配对,即从当前窗口中任意选取两个边缘点(x
i
,y
i
)和(x
j
,y
j
),计算出由这两点所确定直线的ρ和θ,其中ρ为坐标原点到直线的距离,θ为直线与坐标轴夹角,将全部ρ和θ放入数组h中对数组h(ρ,θ)中相应的元素进行相似度投票;
22.(e)设定阀值t,并将数组h(ρ,θ)中元素的投票值与t进行比较,若大于t,则将之判定为待提取直线输出到数组h1(ρ,θ)。
23.优选地,所述加权k
‑
均值算法的二次投票通过以下方法得到:
24.(i)建立聚类中心、数组h2(ρ,θ),并将其设置为空;
25.(ii)将数组h1中元素按照初次得票数由大到小排列,并将初次得票数最大的元素作为第一个确定的聚类中心写入数组h2中;
26.(iii)遍历数组h1,并计算当前元素与所有聚类中心在参数空间中的距离p,若p的值满足预设条件,则将当前元素归入该类中并重新计算聚类中心,否则将当前元素写入数组h2中,作为新的聚类中心;
27.(iv)重复步骤(ii)、(iii)直至对数组h1的遍历完成且所有聚类中心不再变化;
28.(v)将数组h2中元素作为最终提取结果进行输出。
29.优选地,所述的预设值p通过以下方法得到:
[0030][0031]
其中δρ和δθ分别为距离和角度最小精度值,具体ρ1和ρ2为坐标原点到两直线的距离,θ1和θ2为两直线与坐标轴夹角。
[0032]
优选地,所述的分块概率霍夫变换算法的初次投票通过以下方法得到:
[0033]
若p的值足够小,即两点之间距离足够近,则对二点的相似度值k分别做如下处理:
[0034]
k1=h(ρ1,θ1)=h(ρ1,θ1) 1
[0035]
k2=h(ρ2,θ2)=h(ρ2,θ2) 1
[0036]
否则令:
[0037]
k1=h(ρ1,θ1)=h(ρ1,θ1)
‑1[0038]
k2=h(ρ2,θ2)=h(ρ2,θ2)
‑1[0039]
优选地,所述的加权k
‑
均值算法的二次投票,新的聚类中心通过以下方法得到:
[0040][0041][0042]
k
c
=k
a
k
b
[0043]
其中(ρ
c
,θ
c
,k
c
)为新的聚类中心,(ρ
a
,θ
a
,k
a
)为原始聚类中心,(ρ
b
,θ
b
,k
b
)为新加入该类的极坐标值,k
a
为原聚类中也的初次得票数;k
b
新加入元素的初次得票数,k
c
为聚类后新的得票数。
[0044]
与现有技术相比,本发明所具有的特点和有益效果主要是:
[0045]
(1)该发明可适用于燃料电池气体扩散层sem图像,对图像中的纤维特征进行提取。
[0046]
(2)通过分块概率霍夫变换,将图片中的纤维分块提取,可以有效去除噪声使结果准确。
[0047]
(3)通过自定义投票及聚类,能得到满足聚类精度要求的初始聚类中心,并按照需求不断进行迭代。
[0048]
(4)聚类算法相对于现有神经网络训练方法更为简单,得到结果速度更快,操作方便并具有较高准确度。
[0049]
(5)该方法为建立气体扩散层纤维分布数据库进行大数据分析以及改进产品微观结构提供便利,可有效节约时间、成本。
附图说明
[0050]
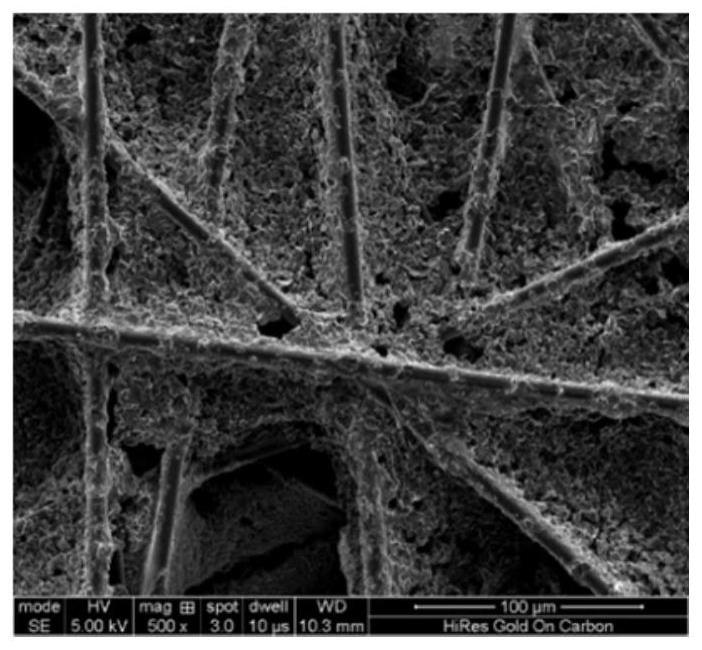
图1为实施例1源图像;
[0051]
图2为实施例1预处理后图像;
[0052]
图3为实施例1分块概率霍夫变换直线检测后图像;
[0053]
图4为实施例1对检测直线初次投票后图像;
[0054]
图5为实施例1采用加权k
‑
均值算法聚类后图像;
[0055]
图6为实施例2源图像;
[0056]
图7为实施例2预处理后图像;
[0057]
图8为实施例2分块概率霍夫变换直线检测后图像;
[0058]
图9为实施例2采用加权k
‑
均值算法聚类后图像;
[0059]
图10为实施例2预处理后图像。
具体实施方式
[0060]
下面结合附图和具体实施例对本发明进行详细说明。
[0061]
实施例1
[0062]
一种基于图像识别的气体扩散层纤维测量方法,通过编写基于分块概率霍夫变换算法的初次投票及基于加权k
‑
均值算法的二次投票实现,包括以下步骤:(1)采集气体扩散层扫描电镜100μm标尺下放大500倍图像进行预处理;(2)将图像进行区域划分(划分为10
×
10小块);(3)运用canny算子对各个区域进行边缘提取;(4)通过分块概率霍夫变换算法对边缘点进行随机“多对一”映射,根据预设值p初次投票映射出参数空间中的点;(5)最后采用加权k
‑
均值算法对参数空间中的点根据预设值p二次投票并进行聚类分析,最终得到纤维数量、长度、角度等结构特征。所述纤维角度为图像水平轴到纤维之间逆时针方向的夹角,所述纤维长度为图像中纤维像素长度,通过图像比例可换算为纤维真实长度。
[0063]
所述预处理为高斯滤波去噪平滑图像,其中高斯内核大小11
×
11,高斯函数沿x方向和y方向的标准差为0。
[0064]
所述canny算子的低阈值为10,高阈值为250,sobel核的大小为3。
[0065]
所述概率霍夫变换中距离精度值r为1,角度精度值为π/180,最小长度为30,最大间距为100。
[0066]
分块概率霍夫变换算法的初次投票通过以下方法得到:
[0067]
(a)首先,在图像空间建立直角坐标系(x,y),并对x轴、y轴均匀划分,将坐标系分割为10
×
10大小相等的小区域;
[0068]
(b)若图像大小不为小区域的整数,则将原始图像进行扩充,扩充部分的灰度值设置为0;
[0069]
(c)建立一个动态窗口,窗口大小与每个小区域大小相同,对当前窗口中的小区域进行鉴别,若符合鉴别条件则进行步骤(d),否则窗口移动向下一个区域;
[0070]
(d)将符合鉴别条件的区域中的所有边缘点进行两两配对,即从当前窗口中任意选取两个边缘点(x
i
,y
i
)和(x
j
,y
j
),计算出由这两点所确定直线的ρ和θ,其中ρ为坐标原点到直线的距离,θ为直线与坐标轴夹角,将全部ρ和θ放入数组h中,对数组h(ρ,θ)中相应的元素进行相似度投票;
[0071]
(e)设定阀值t=0,并将数组h(ρ,θ)中元素的投票值与t进行比较,若大于t,则将之判定为待提取直线输出到数组h1(ρ,θ)。
[0072]
所述加权k
‑
均值算法的二次投票通过以下方法得到:
[0073]
(i)建立聚类中心、数组h2(ρ,θ),并将其设置为空;
[0074]
(ii)将数组h1中元素按照初次得票数由大到小排列,并将初次得票数最大的元素
作为第一个确定的聚类中心写入数组h2中;
[0075]
(iii)遍历数组h1,并计算当前元素与所有聚类中心在参数空间中的距离p,若p的值满足预设条件,则将当前元素归入该类中并重新计算聚类中心,否则将当前元素写入数组h2中,作为新的聚类中心;
[0076]
(iv)重复步骤(ii)、(iii)直至对数组h1的遍历完成且所有聚类中心不再变化;
[0077]
(v)将数组h2中元素作为最终提取结果进行输出。
[0078]
预设值p通过以下方法得到:
[0079][0080]
其中δρ和δθ分别为距离和角度最小精度值,具体ρ1和ρ2为坐标原点到两直线的距离,θ1和θ2为两直线与坐标轴夹角。
[0081]
分块概率霍夫变换算法的初次投票通过以下方法得到:
[0082]
若p的值足够小,即两点之间距离足够近,则对二点的相似度值k分别做如下处理:
[0083]
k1=h(ρ1,θ1)=h(ρ1,θ1) 1
[0084]
k2=h(ρ2,θ2)=h(ρ2,θ2) 1
[0085]
否则令:
[0086]
k1=h(ρ1,θ1)=h(ρ1,θ1)
‑1[0087]
k2=h(ρ2,θ2)=h(ρ2,θ2)
‑1[0088]
加权k
‑
均值算法的二次投票,新的聚类中心通过以下方法得到:
[0089][0090][0091]
k
c
=k
a
k
b
[0092]
其中(ρ
c
,θ
c
,k
c
)为新的聚类中心,(ρ
a
,θ
a
,k
a
)为原始聚类中心,(ρ
b
,θ
b
,k
b
)为新加入该类的极坐标值,k
a
为原聚类中也的初次得票数;k
b
新加入元素的初次得票数,k
c
为聚类后新的得票数。
[0093]
图1为实施例1源图像,图2为实施例1预处理后图像,图3为实施例1分块概率霍夫变换直线检测后图像,图4为实施例1对检测直线初次投票后图像,图5为实施例1采用加权k
‑
均值算法聚类后图像。
[0094]
实施例2
[0095]
一种基于图像识别的气体扩散层纤维测量方法,通过编写基于分块概率霍夫变换算法的初次投票及基于加权k
‑
均值算法的二次投票实现,包括以下步骤:(1)采集气体扩散层扫描电镜50μm标尺下放大500倍图像进行预处理;(2)将图像进行区域划分(划分为6
×
6小块);(3)运用canny算子对各个区域进行边缘提取;(4)通过分块概率霍夫变换算法对边缘点进行随机“多对一”映射,根据预设值p初次投票映射出参数空间中的点;(5)最后采用加权k
‑
均值算法对参数空间中的点根据预设值p二次投票并进行聚类分析,最终得到纤维数量、长度、角度等结构特征。所述纤维角度为图像水平轴到纤维之间逆时针方向的夹角,所述纤维长度为图像中纤维像素长度,通过图像比例可换算为纤维真实长度。
[0096]
所述预处理为高斯滤波去噪平滑图像,其中高斯内核大小11
×
11,高斯函数沿x方
向和y方向的标准差为0。
[0097]
所述canny算子的低阈值为10,高阈值为250,sobel核的大小为3。
[0098]
所述概率霍夫变换中距离精度值r为1,角度精度值为π/180,最小长度为30,最大间距为100。
[0099]
分块概率霍夫变换算法的初次投票通过以下方法得到:
[0100]
(a)首先,在图像空间建立直角坐标系(x,y),并对x轴、y轴均匀划分,将坐标系分割为6
×
6大小相等的小区域;
[0101]
(b)若图像大小不为小区域的整数,则将原始图像进行扩充,扩充部分的灰度值设置为0;
[0102]
(c)建立一个动态窗口,窗口大小与每个小区域大小相同,对当前窗口中的小区域进行鉴别,若符合鉴别条件则进行步骤(d),否则窗口移动向下一个区域;
[0103]
(d)将符合鉴别条件的区域中的所有边缘点进行两两配对,即从当前窗口中任意选取两个边缘点(x
i
,y
i
)和(x
j
,y
j
),计算出由这两点所确定直线的ρ和θ,其中ρ为坐标原点到直线的距离,θ为直线与坐标轴夹角,将全部ρ和θ放入数组h中,对数组h(ρ,θ)中相应的元素进行相似度投票;
[0104]
(e)设定阀值t=0,并将数组h(ρ,θ)中元素的投票值与t进行比较,若大于t,则将之判定为待提取直线输出到数组h1(ρ,θ)。
[0105]
所述加权k
‑
均值算法的二次投票通过以下方法得到:
[0106]
(i)建立聚类中心、数组h2(ρ,θ),并将其设置为空;
[0107]
(ii)将数组h1中元素按照初次得票数由大到小排列,并将初次得票数最大的元素作为第一个确定的聚类中心写入数组h2中;
[0108]
(iii)遍历数组h1,并计算当前元素与所有聚类中心在参数空间中的距离p,若p的值满足预设条件,则将当前元素归入该类中并重新计算聚类中心,否则将当前元素写入数组h2中,作为新的聚类中心;
[0109]
(iv)重复步骤(ii)、(iii)直至对数组h1的遍历完成且所有聚类中心不再变化;
[0110]
(v)将数组h2中元素作为最终提取结果进行输出。
[0111]
预设值p通过以下方法得到:
[0112][0113]
其中δρ和δθ分别为距离和角度最小精度值,具体ρ1和ρ2为坐标原点到两直线的距离,θ1和θ2为两直线与坐标轴夹角。
[0114]
分块概率霍夫变换算法的初次投票通过以下方法得到:
[0115]
若p的值足够小,即两点之间距离足够近,则对二点的相似度值k分别做如下处理:
[0116]
k1=h(ρ1,θ1)=h(ρ1,θ1) 1
[0117]
k2=h(ρ2,θ2)=h(ρ2,θ2) 1
[0118]
否则令:
[0119]
k1=h(ρ1,θ1)=h(ρ1,θ1)
‑1[0120]
k2=h(ρ2,θ2)=h(ρ2,θ2)
‑1[0121]
加权k
‑
均值算法的二次投票,新的聚类中心通过以下方法得到:
[0122][0123][0124]
k
c
=k
a
k
b
[0125]
其中(ρ
c
,θ
c
,k
c
)为新的聚类中心,(ρ
a
,θ
a
,k
a
)为原始聚类中心,(ρ
b
,θ
b
,k
b
)为新加入该类的极坐标值,k
a
为原聚类中也的初次得票数;k
b
新加入元素的初次得票数,k
c
为聚类后新的得票数。
[0126]
图6为实施例2源图像,图7为实施例2预处理后图像,图8为实施例2分块概率霍夫变换直线检测后图像,图9为实施例2采用加权k
‑
均值算法聚类后图像,图10为实施例2预处理后图像。
[0127]
分别对实施例中纤维长度、角度等结构特征进行提取,数据分析如下表1所示,通过将提取纤维复现在源图像中对比实际纤维及提取纤维可知,提取结果拟合程度较好,表明用该方法提取纤维特征有效可靠。
[0128]
表1纤维结构特征的提取值
[0129][0130][0131]
上述的对实施例的描述是为方便于该技术领域的普通技术人员能理解和使用发明。熟悉本领域技术的人员显然可以对这些实施例做出各种修改,并把在此说明的一般原理应用到其他领域实施例中而不必经过创造性的劳动。因此,本发明不限于上述实施例,本领域技术人员根据本发明的揭示,不脱离本发明范畴所做出的改进和修改都应该在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。

