技术特征:
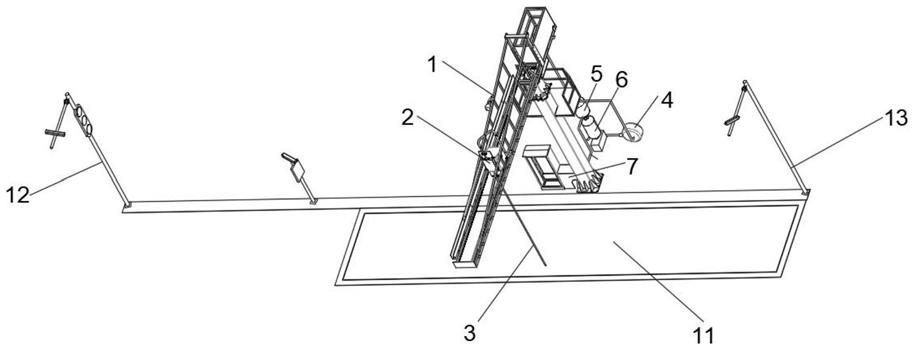
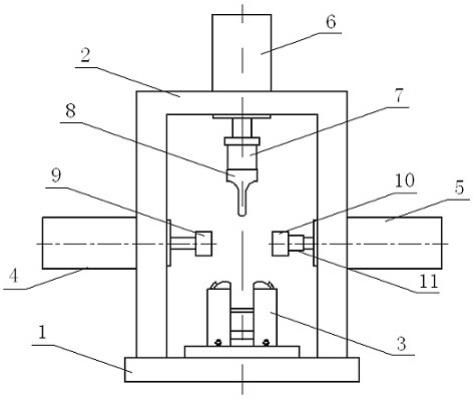
1.基于粮食扦样机的可调式采样机构,其安装于l形扦样机主体(1)的顶梁上,且基于区域网信号连接中控平台,其特征在于,包括采样驱动组件(2)、采样管(3)、负压风机(4)、分样器(5)、收集罐(6)和收集箱(7),采样管(3)、负压风机(4)和分样器(5)通过管道依次贯通连接,所述分样器(5)的两个出料口分别通过管道与收集罐(6)和收集箱(7)贯通连接,所述采样管(3)设于采样驱动组件(2)处;所述驱动组件包括采样驱动壳体(21)、自走微控组件(22)、夹持组件(23)和升降微控组件(24),所述采样驱动壳体(21)的下端对称设有u形卡夹(25),两个所述u形卡夹(25)滑动设于l形扦样机主体(1)顶梁的两个横杆上,所述自走微控组件(22)、夹持组件(23)和升降微控组件(24)均安装在采样驱动壳体(21)上,且自走微控组件(22)与l形扦样机主体(1)顶梁适配连接,所述夹持组件(23)设有多个,且至少有两个分设于升降微控组件(24)的两端面,所述采样管(3)设于夹持组件(23)的中轴线上,且采样管(3)设于升降微控组件(24)的中轴线上,且夹持组件(23)与升降微控组件(24)位于同中轴线上;所述中控平台包括:输入控制模块,用于获取立体采样点三维坐标信息并在其显示界面显示,且产生新三维采样点坐标和抗干扰运行信号,还将新三维采样点坐标和抗干扰运行信号发送给样点分析模块,还用于输入扦样车辆内的粮食状态信息;样点建立模块,用于接收扦样车辆内的粮食状态信息并生成三维采样点的状况信息,还将三维采样点的状况信息发送给样点分析模块;立体采样点三维坐标信息包括三维采样点的坐标和三维立体建模模型;样点分析模块,用于接收三维采样点的状况信息、新三维采样点坐标和抗干扰运行信号并对其进行分析处理并产生第一采样控制信号或第二采样控制信号,还将第一采样控制信号或第二采样控制信号发送给元件执行模块;元件执行模块,用于接收第一采样控制信号或第二采样控制信号,并立即控制对应部件运行进行粮食的采样工作。2.根据权利要求1所述的基于粮食扦样机的可调式采样机构,其特征在于,所述输入控制模块输入的扦样车辆内的粮食状态信息由扦样车辆内粮食的总长度、扦样车辆内粮食的总宽度、扦样车辆内粮食的总高度和扦样车辆内粮食的总重量构成。3.根据权利要求1所述的基于粮食扦样机的可调式采样机构,其特征在于,所述自走微控组件(22)包括第一伺服电机(221)和第一锥齿轮(222),所述第一伺服电机(221)固定设于采样驱动壳体(21),且第一伺服电机(221)垂直设置,所述第一锥齿轮(222)固定套设于第一伺服电机(221)输出轴的外端,所述第一锥齿轮(222)的两侧对称啮合有第二锥齿轮(223),所述第二锥齿轮(223)固定连接与第一转杆(224),且第二锥齿轮(223)套设于第一转杆(224)的一端,所述第一转杆(224)的另一端转动贯穿采样驱动壳体(21)内壁延伸到其外部并固定连接有自走齿轮(225),所述自走齿轮(225)套设于第一转杆(224)的外端,两个所述自走齿轮(225)啮合连接有两个自走齿杆(226),所述自走齿杆(226)固定设于l形扦样机主体(1)顶梁的两个横杆的底端。4.根据权利要求1所述的基于粮食扦样机的可调式采样机构,其特征在于,所述夹持组件(23)包括第二转杆(231)和夹持转轮(232),所述第二转杆(231)与采样驱动壳体(21)固定连接,所述夹持转轮(232)与第二转杆(231)转动连接,两个所述夹持转轮(232)对称夹持
于采样管(3)的外端,所述夹持组件(23)与升降微控组件(24)配合设置。5.根据权利要求4所述的基于粮食扦样机的可调式采样机构,其特征在于,所述升降微控组件(24)包括第二伺服电机(241)和第一齿轮(242),所述第二伺服电机(241)固定设于采样驱动壳体(21),且第二伺服电机(241)与第一伺服电机(221)垂直设置,所述第一齿轮(242)固定套设于第二伺服电机(241)的输出轴的外端,所述第一齿轮(242)设有两个,所述第一齿轮(242)啮合连接有两条齿链,两条所述齿链分别啮合连接有两个第二齿轮(243),所述齿链套设于第一齿轮(242)和第二齿轮(243)的外端,所述第二齿轮(243)固定连接有第三转杆(244),所述第二齿轮(243)套设于第三转杆(244)的一端,所述第三转杆(244)的另一端贯穿采样驱动壳体(21)的内壁延伸到其外部并固定设有升降转轮(245),所述升降转轮(245)套设于第三转杆(244)的另一端,两个所述升降转轮(245)套对称抵接于采样管(3)的外端。6.根据权利要求1所述的基于粮食扦样机的可调式采样机构,其特征在于,所述样点建立模块工作步骤为:sa:样点建立模块接收到扦样车辆内粮食的总长度、扦样车辆内粮食的总宽度、扦样车辆内粮食的总高度和用户需求采样重量后,以扦样车辆内粮食的顶面的拐角处为三维坐标的坐标原点,以扦样车辆内粮食顶面的两个水平边为延伸边建立x轴和y轴,以扦样车辆内粮食的顶面到底面建立h轴从而生成三维立体建模模型;sb:以扦样车辆内粮食的总重量为依据根据用户需求采样重量生成多个三维采样点的坐标(x,y,h);其中多个三维采样点的坐标(x,y,h)取样的区域范围在防误碰区域内;sc:当多个三维采样点的坐标(x,y,h)和三维立体建模模型生成后,并将其发送给输入控制模块;其中三维采样点的坐标(x,y,h)和三维立体建模模型构成立体采样点三维坐标信息。7.根据权利要求1所述的基于粮食扦样机的可调式采样机构,其特征在于,所述样点分析模块工作步骤为:s1:当样点分析模块接收到新三维采样点坐标时,对多个新三维采样点进行模拟分析连线,对模拟分析连线进行自动筛选得到多个新三维采样点坐标的采样轨迹路线,采样轨迹路线从整体模拟出采样管(3)移动后采样的最短采样时间;s2:同时获取采样管(3)的直径d、新三维采样点坐标到扦样车辆内粮食的顶面的距离l和粮食的密度p,经计算,得到干扰项偏离质量m1,干扰项偏离质量m1具体表现为当采样管(3)插入粮食内并到达新三维采样点的位置时,其采样管(3)内会进入粮食,从而无法精准的从新三维采样点采样;s3:当样点分析模块同步没有接收到抗干扰运行信号时,直接获取扦样车辆内粮食的总重量并将其与新三维采样点的个数相除,得到各新三维采样点的平均采样质量m2;s4:当得到各新三维采样点的平均采样质量m2后将其与多个干扰项偏离质量m1相减得到采样点实际动态吸取量m3;结合采样轨迹路线和采样点实际动态吸取量m3生成第一采样控制信号,并将其发送给元件执行模块;s5:当样点分析模块同步接收到抗干扰运行信号时,当得到各新三维采样点的平均采样质量m2后将其与多个干扰项偏离质量m1相加得到各采样点实际动态吸取量m4;
s6:结合采样轨迹路线和采样点实际动态吸取量m4生成第二采样控制信号,并将其发送给元件执行模块。8.根据权利要求1所述的基于粮食扦样机的可调式采样机构,其特征在于,所述元件执行模块工作步骤为:sa:当元件执行模块获取到第一采样控制信号后,立即控制l形扦样机主体(1)旋转和控制自走微控组件(22)工作,使采样管(3)移动到新三维采样点的正上方,当采样管(3)移动到新三维采样点的正上方后,立即控制升降微控组件(24)工作,使采样管(3)下降插入粮食内并到达新三维采样点的位置处,当采样管(3)到达新三维采样点的位置处时,则控制负压风机(4)打开产生负压吸力抽取新三维采样点处的粮食并经分样器(5)注入到收集罐(6)内,然后依据采样轨迹路线重复上述步骤完成多个新三维采样点的采样工作,从而完成采样工作;sb:当元件执行模块获取到第二采样控制信号后,立即控制l形扦样机主体(1)旋转和控制自走微控组件(22)工作,使采样管(3)移动到新三维采样点的正上方,当采样管(3)移动到新三维采样点的正上方后,立即控制升降微控组件(24)工作,使采样管(3)下降插入粮食内并到达新三维采样点的位置处,当采样管(3)到达新三维采样点的位置处时,则控制负压风机(4)打开产生负压吸力抽取新三维采样点处的粮食并吸取m4样粮,当抽取新三维采样点处的粮食后进入到分样器(5)内,分样器(5)将m1质量的样粮注入到收集箱(7)内,然后将m2质量的样粮注入到收集箱(7)内,然后依据采样轨迹路线重复上述步骤完成多个新三维采样点的采样工作,从而完成采样工作。
技术总结
本发明公开了基于粮食扦样机的可调式采样机构,涉及粮食扦样机技术领域,包括采样驱动组件、采样管、负压风机、分样器、收集罐、收集箱配合、输入控制模块、样点建立模块、样点分析模块和元件执行模块;本发明实现了对粮样的信息采集、三维采样点建立控制、运行模拟计算并生成第一采样控制信号或第二采样控制信号,通过第一采样控制信号或第二采样控制信号产生,从而精准控制采样管的位置并精准控制采取粮样的重量,使本设备采样更加精准,采集粮样的范围更广更深,更加全面,使后续的检测更加准确,解决了传统设备采样不够精准,造成的粮样品质判断不够准确的问题。品质判断不够准确的问题。品质判断不够准确的问题。
技术研发人员:曹凯杰 管文武 徐旭 程伟 夏维
受保护的技术使用者:安徽省凯杰机械制造有限公司
技术研发日:2021.09.15
技术公布日:2021/12/14
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。