1.本发明涉及果品采摘领域,具体为一种松树塔的自动采摘装置。
背景技术:
2.目前,很多松树塔采摘工作是由采摘人员爬到树顶端拿棍棒敲打松树塔,将松树塔从松树上打下来,或者用梯子爬到松树的中间位置后再爬到树的顶端拿棍棒进行敲打松树塔,再或者用热气球升到松树之上,采摘人员用棍棒敲打松树塔,树下再由人员进行捡拾;以上采摘方式都很不安全,很容易造成采摘人员的伤亡事故。
技术实现要素:
3.针对上述存在的技术不足,本发明的目的是提供一种松树塔的自动采摘装置,其可以通过手机app对装置控制,使其自己爬到树顶进行采摘松树塔,树下有收集果实网将果实收集,避免了采摘人员因爬树造成的人员伤亡事故。
4.为解决上述技术问题,本发明采用如下技术方案:
5.一种松树塔的自动采摘装置,其特征在于,包括攀爬采摘部和果实收集网;
6.所述攀爬采摘部包括伸缩剪刀、摄像头、驱动电机、刺轮、万向节、光能电池板、无线充电装置、wifi控制板和单节连接块;若干个所述单节连接块通过万向节依次连接形成攀爬主体架,所述攀爬主体架头部的单节连接块上设置有摄像头,所述攀爬主体架头部的单节连接块上设置有伸缩剪刀,每个所述单节连接块均通过转轴安装两个刺轮;每个所述单节连接块上均设置有刺轮驱动电机,所述刺轮驱动电机上面设置有防护罩,所述防护罩上面设置有光能电池板和无线充电装置;所述光能电池板和无线充电装置电连接,所述无线充电装置通过无线电和驱动电机电连接;
7.所述刺轮驱动电机的电机轴上连接有蜗杆,安装所述刺轮的转轴上设置有蜗轮,且和蜗杆相啮合;
8.所述攀爬主体架头部第一节的单节连接块上设置有剪刀驱动电机,所述剪刀驱动电机的电机轴上设置有驱动齿轮,所述攀爬主体架头部第一节的单节连接块内部设置有移动导向条,移动齿条可移动的设置于移动导向条上,且和驱动齿轮相啮合;所述攀爬主体架头部第一节的单节连接块底部设置有滑动槽,所述伸缩剪刀一端通过销钉连接传动块,所述传动块通过连接杆和移动齿条底部连接;所述伸缩剪刀一端的销钉通过滑动槽穿进攀爬主体架头部第一节的单节连接块内;
9.其中一个所述单节连接块内部设置有wifi控制板,所述wifi控制板和刺轮驱动电机、剪刀驱动电机连接;
10.所述果实收集网为碗状结构,且底部设置有若干个支架,所述果实收集网上设置有开口,且开口处通过拉链或者魔术贴闭合。
11.本发明的有益效果在于:通过手机app来控制装置爬树的前、后、左右、上、下方向的移动,躲避树杈之类的障碍物,通过摄像头观察与果实的距离,到达一定距离后控制伸缩
剪刀剪掉果实根部进行采摘,果实被剪掉后自然下坠到收集果实网内方便收集;避免了采摘人员因爬树带来的掉落的伤亡事故。
附图说明
12.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
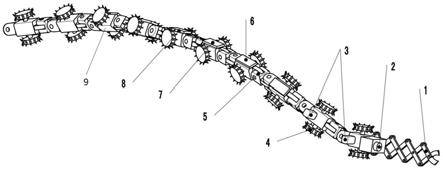
13.图1为本发明提供的一种松树塔的自动采摘装置的攀爬采摘部的结构示意图;
14.图2为本发明提供的一种松树塔的自动采摘装置的果实收集网的结构示意图;
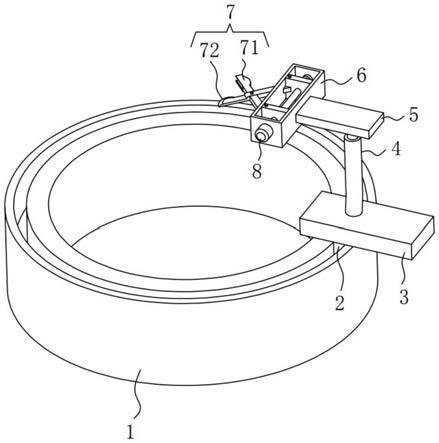
15.图3为本发明提供的一种松树塔的自动采摘装置使用状态下的结构示意图;
16.图4为本发明提供的一种松树塔的自动采摘装置刺轮驱动机构的结构示意图;
17.图5为本发明提供的一种松树塔的自动采摘装置伸缩剪刀驱动机构的结构示意图。
18.附图标记说明:
19.伸缩剪刀1、摄像头2、刺轮驱动电机3、刺轮4、万向节5、光能电池板6、无线充电装置7、wifi控制板8、单节连接块9、剪刀驱动电机10、树木11、果实收集网12、支架13、地面14、移动齿条15、移动导向条16、驱动齿轮17、蜗轮18、蜗杆19、传动块20、连接杆21。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.如图1
‑
图5所示,一种松树塔的自动采摘装置,包括攀爬采摘部和果实收集网;
22.所述攀爬采摘部包括伸缩剪刀1、摄像头2、驱动电机、刺轮4、万向节5、光能电池板6、无线充电装置7、wifi控制板8和单节连接块9;若干个所述单节连接块9通过万向节5依次连接形成攀爬主体架,所述攀爬主体架头部的单节连接块9上设置有摄像头2,所述攀爬主体架头部的单节连接块9上设置有伸缩剪刀1,每个所述单节连接块9均通过转轴安装两个刺轮4;每个所述单节连接块9上均设置有刺轮4驱动电机3,所述刺轮4驱动电机3上面设置有防护罩,所述防护罩上面设置有光能电池板6和无线充电装置7;所述光能电池板6和无线充电装置7电连接,所述无线充电装置7通过无线电和驱动电机电连接;
23.所述刺轮4驱动电机3的电机轴上连接有蜗杆19,安装所述刺轮4的转轴上设置有蜗轮18,且和蜗杆19相啮合;
24.所述攀爬主体架头部第一节的单节连接块9上设置有剪刀驱动电机10,所述剪刀驱动电机10的电机轴上设置有驱动齿轮17,所述攀爬主体架头部第一节的单节连接块9内部设置有移动导向条16,移动齿条15可移动的设置于移动导向条16上,且和驱动齿轮17相啮合;所述攀爬主体架头部第一节的单节连接块9底部设置有滑动槽,所述伸缩剪刀1一端通过销钉连接传动块20,所述传动块20通过连接杆21和移动齿条15底部连接;所述伸缩剪
刀1一端的销钉通过滑动槽穿进攀爬主体架头部第一节的单节连接块9内;
25.其中一个所述单节连接块9内部设置有wifi控制板8,所述wifi控制板8和刺轮4驱动电机3、剪刀驱动电机10连接;
26.所述果实收集网12为碗状结构,且底部设置有若干个支架13,所述果实收集网12上设置有开口,且开口处通过拉链或者魔术贴闭合。
27.使用时,将果实收集网12放置在树木11根部,果实收集网12将树木11根部围绕起来,形成碗状朝上;
28.将攀爬采摘部放置在待采摘的树木11上,通过wifi控制板8和手机连接用app控制运行方向,刺轮4驱动电机3、剪刀驱动电机10分别给刺轮4、伸缩剪刀1进行驱动;
29.刺轮4驱动电机3转动时带动蜗杆19转动,蜗杆19和蜗轮18啮合,进而蜗轮18转动,蜗轮18设置在安装刺轮4的转轴上,进而带动刺轮4转动,刺轮4被刺轮4驱动电机3驱动转动,进而攀爬采摘部通过万向节5蛇形向树顶爬去,通过摄像头2实时观察障碍物来控制运行方向,到达果实一定位置后控制剪刀驱动电机10驱动伸缩剪刀1将果实剪掉,果实掉进果实收集网12内进行收集;
30.剪刀驱动电机10转动时,带动驱动齿轮17转动,驱动齿轮17和移动齿条15啮合,进而移动齿条15在驱动齿轮17带动下沿着移动导向条16移动,移动齿条15通过连接杆21、传动块20驱动伸缩剪刀1使伸缩剪刀1收缩或者伸长,伸缩剪刀1伸长时剪刀口闭合即可将果实剪掉;
31.攀爬采摘部通过光能电池板6和无线充电装置7供电提供续航能力。
32.本发明的设计通过自动采摘装置对果实采摘,避免因为爬树爬的太高造成的精神紧张,或者风过大将人员吹落树下的人员伤亡事故,提高采摘果实的效率。
33.显然,本领域的技术人员可以对本发明进行各种改动和变型而不脱离本发明的精神和范围。这样,倘若本发明的这些修改和变型属于本发明权利要求及其等同技术的范围之内,则本发明也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。