1.本发明涉及微创手术机器人技术领域,特别涉及一种手术机器人四自由度解耦执行器。
背景技术:
2.微创外科手术一般也称为介入式手术,它是通过在体表切开数个细小的切口(或依靠人体天然官腔),借助于视觉显示系统的图像引导,将手术器械通过体表切口伸入体内进行治疗或诊断而完成的手术。微创手术技术使得大部分的外科手术告别了开放式的手术模式,将机器人技术应用于医疗外科手术已经变得越来越流行,机器人在操作稳定性、快捷性和精确性方面具有显著的优势,将机器人技术融入外科手术中,可以改进医生的手术环境,缩短患者的恢复时间。
3.公开号为cn103169542a的专利文献公开了一种用于腹腔镜微创手术的解耦型手术装置,解决了传统手术器械为非解耦形式、手术过程中系统的控制十分不方便的问题。其俯仰轴机构1
‑
4包括两个第一解耦轴1
‑4‑
1和两个第二解耦轴1
‑4‑
2,由于第一传动绳7与第二传动绳8被两个小轴1
‑4‑
1固定并穿过轴1
‑
4的中心,故腕部5上的结构绕轴1
‑
4转动的时候对第一传动绳7和第二传动绳8的长度并无影响,从而实现了对于第一传动绳7所控制的第一钳头1
‑
1和第二传动绳8所控制的第二钳头1
‑
2的动作的解耦,使得第一转轴机构3和第二转轴机构4分别独立控制分离钳机构1和分离钳机构2的运动。此手术装置虽然也具有四个自由度,但其中两个自由度为分离钳机构1的第一钳头1
‑
1、第二钳1
‑
2的分开控制,剩余两个自由度为腕部5的俯仰动作以及回转杆2的回转运动,因此自由度还能进一步优化,对于解耦结构也提出了新的要求。
技术实现要素:
4.本发明提供了一种手术机器人四自由度解耦执行器,提供一种自由度设置更佳的手术机器人解耦执行器,采用不同的解耦结构确保执行器各个自由度的执行控制。
5.为了达到上述目的,本发明的实施例提供了一种手术机器人四自由度解耦执行器,包括:
6.驱动部;
7.执行部,所述执行部包括剪切机构和至少两个关节机构,所述剪切机构安装在其中一个所述关节机构上,每个所述关节机构逐一转动的连接,所述剪切机构和每个关节机构通过独立的驱动钢丝分别与所述驱动部连接,相邻两个所述关节机构之间均设置有弹性变形结构,从后一组所述关节机构引出的驱动钢丝先穿过所述弹性变形结构后,再引入前一组所述关节机构,所述关节机构运动时,所述弹性变形结构变形而使内部的驱动钢丝长度不变。
8.其中,所述弹性变形结构为弹簧管。
9.其中,所述弹簧管的内部设置有软管,所述软管的内部涂抹有润滑脂,所述驱动钢
丝对应部分穿设在所述软管内。
10.其中,所述关节机构包括旋转臂、偏航关节机构和俯仰关节机构,所述旋转臂的尾端转动地设置在所述驱动部内,所述旋转臂通过旋转驱动钢丝与所述驱动部传动连接;所述偏航关节机构包括偏航关节轴、偏航驱动轮和偏航关节,所述偏航关节轴转动地穿设在所述旋转臂的首端,所述偏航驱动轮固定套设在所述偏航关节轴上,所述偏航关节固定设置在所述偏航关节轴上,所述偏航驱动轮通过偏航驱动钢丝与所述驱动部传动连接;所述俯仰关节机构包括俯仰关节轴、俯仰驱动轮和俯仰关节,所述俯仰关节轴转动地穿设在所述偏航关节上,所述俯仰驱动轮固定套设在所述俯仰关节轴上,所述俯仰关节固定设置在所述俯仰关节轴上,所述俯仰驱动轮通过俯仰驱动钢丝与所述驱动部传动连接。
11.其中,所述剪切机构包括第一剪切手指、第二剪切手指、剪切轴和剪切锥齿轮,所述第一剪切手指和第二剪切手指转动地套设在所述剪切轴上,所述剪切轴固定穿设在所述俯仰关节上,所述第一剪切手指和第二剪切手指的底部均设置有锥齿轮,所述锥齿轮与所述剪切锥齿轮啮合,所述剪切锥齿轮通过剪切驱动钢丝与所述驱动部传动连接。
12.其中,所述剪切锥齿轮的杆体两侧均设置有剪切导向轮,所述剪切导向轮的轴向与所述剪切锥齿轮的轴向垂直,所述剪切驱动钢丝绕过所述剪切导向轮与所述驱动部传动连接。
13.其中,所述驱动部设置有驱动底座,所述驱动底座上转动地设置有旋转驱动滚筒、偏航驱动滚筒、俯仰驱动滚筒和剪切驱动滚筒,所述旋转驱动钢丝与所述旋转驱动滚筒连接,所述偏航驱动钢丝与所述偏航驱动滚筒连接,所述俯仰驱动钢丝与所述俯仰驱动滚筒连接,所述剪切驱动钢丝与所述剪切驱动滚筒连接。
14.其中,所述驱动底座上设置有滑轮支架,所述滑轮支架上设置有多个钢丝导向件,所述旋转驱动钢丝、偏航驱动钢丝、俯仰驱动钢丝和剪切驱动钢丝分别绕过对应的所述钢丝导向件。
15.本发明的上述方案有如下的有益效果:
16.本发明所述的手术机器人四自由度解耦执行器,通过弹簧管等弹性变形结构的设置,使后一组关节机构相对于前一组关节机构旋转运动时,弹簧管同步弯曲变形而保持驱动钢丝长度不变,保证执行器各个自由度相互独立而不受其他自由度的影响,有效实现了自由度的解耦;本发明执行器的末端剪切机构采用锥齿轮驱动,驱动过程能够保证剪切手指之间运动同步,剪切力度稳定。
附图说明
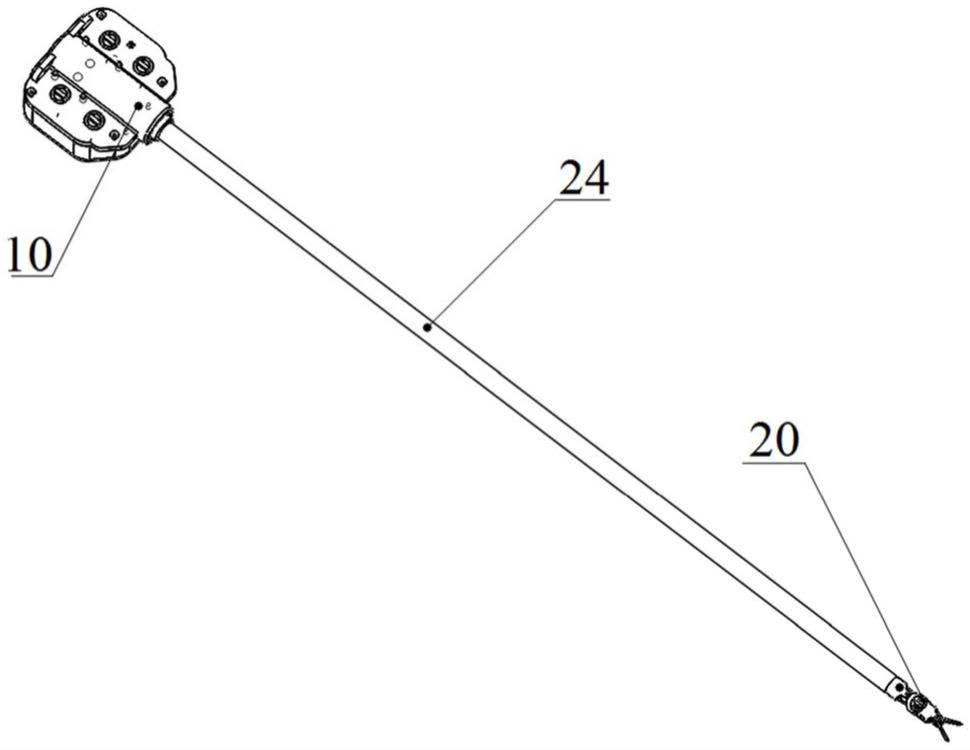
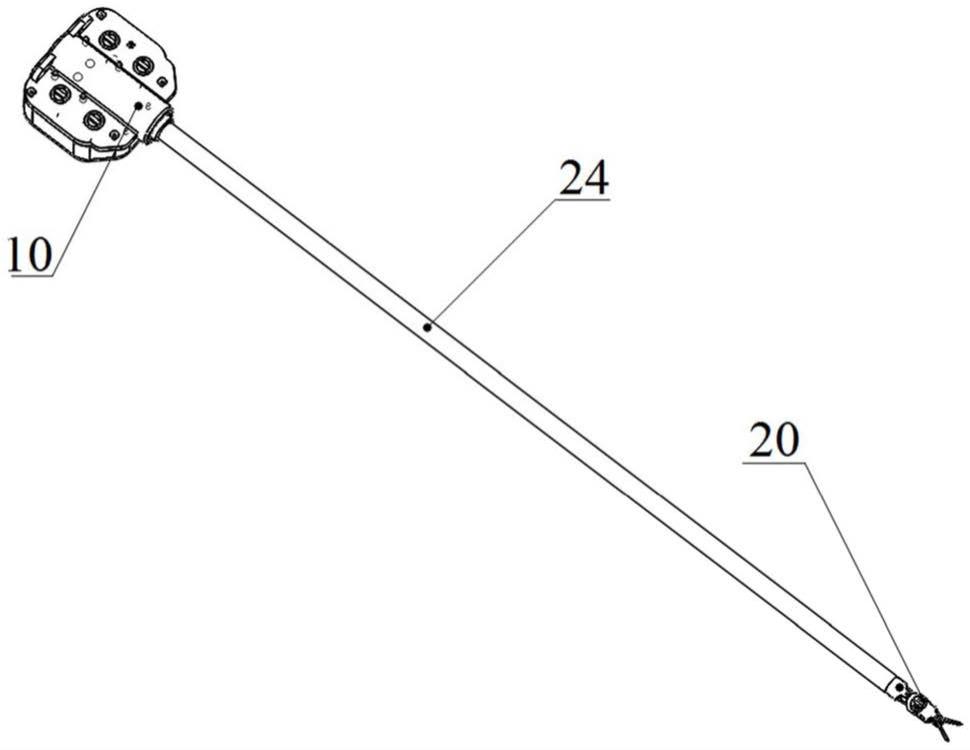
17.图1为本发明的手术机器人四自由度解耦执行器整体结构示意图;
18.图2为本发明的手术机器人四自由度解耦执行器执行部结构示意图一;
19.图3为本发明的手术机器人四自由度解耦执行器执行部结构示意图二;
20.图4为本发明的手术机器人四自由度解耦执行器弹簧管及驱动钢丝示意图;
21.图5为本发明的手术机器人四自由度解耦执行器弹簧管安装示意图;
22.图6为本发明的手术机器人四自由度解耦执行器驱动部结构示意图;
23.图7为本发明的手术机器人四自由度解耦执行器驱动部爆炸图。
24.【附图标记说明】
25.10
‑
驱动部;11
‑
驱动底座;111
‑
旋转驱动滚筒;112
‑
偏航驱动滚筒;113
‑
俯仰驱动滚筒;114
‑
剪切驱动滚筒;12
‑
滑轮支架;13
‑
压盖;14
‑
顶盖;20
‑
执行部;21
‑
剪切机构;211
‑
剪切驱动钢丝;212
‑
第一剪切手指;213
‑
第二剪切手指;214
‑
剪切轴;215
‑
剪切锥齿轮;216
‑
剪切导向轮;22
‑
俯仰关节机构;221
‑
俯仰驱动钢丝;222
‑
俯仰关节轴;223
‑
俯仰驱动轮;224
‑
俯仰关节;23
‑
偏航关节机构;231
‑
偏航驱动钢丝;232
‑
偏航关节轴;233
‑
偏航驱动轮;234
‑
偏航关节;24
‑
旋转臂;241
‑
旋转驱动钢丝;30
‑
弹簧管;31
‑
俯仰弹簧管;32
‑
偏航弹簧管;33
‑
软管。
具体实施方式
26.为使本发明要解决的技术问题、技术方案和优点更加清楚,下面将结合附图及具体实施例进行详细描述。
27.本发明提供了一种手术机器人四自由度解耦执行器,提供一种自由度设置更佳的手术机器人解耦执行器,采用不同的解耦结构确保执行器各个自由度的执行控制。
28.如图1至图3所示,本发明的实施例提供了一种手术机器人四自由度解耦执行器,包括:驱动部10和执行部20,所述执行部20的关节机构具体包括剪切机构21、旋转臂24偏航关节机构23和俯仰关节机构22,组成四自由度执行器,所述剪切机构21、旋转臂24、偏航关节机构23和俯仰关节机构22分别通过所述剪切驱动钢丝211、旋转驱动钢丝221、偏航驱动钢丝231和俯仰驱动钢丝241与所述驱动部10传动连接,所述驱动部10能够通过相应的驱动钢丝将驱动力传递至对应的关节机构或剪切机构上,从而实现解耦运动;所述剪切机构21安装在所述俯仰关节机22上,所述俯仰关节机构22转动地连接所述偏航关节机构23上,所述偏航关节机构23转动地连接在所述旋转臂24的首端,所述旋转臂24的尾端转动地设置在所述驱动部10。
29.本实施例中相邻两个所述关节机构之间均设置有弹性变形结构,所述弹性变形结构能够保证各关节机构运动时互不干涉,达到解耦控制的效果,本发明的所述弹性变形结构为所述弹簧管30,从后一组所述关节机构引出的驱动钢丝先穿过所述弹性变形结构后,再引入前一组所述关节机构。例如所述剪切机构21的所述剪切驱动钢丝211穿过所述俯仰关节机构22后,再穿过俯仰关节机构22与偏航关节机构23之间的俯仰弹簧管31,然后依次穿过偏航关节机构23、偏航关节机构23与旋转臂之间的偏航弹簧管32,最后穿过所述旋转臂24而与驱动部10连接;所述俯仰关节机构22的所述俯仰驱动钢丝221穿过所述偏航关节机构23后,再穿过偏航关节机构23与旋转臂24之间的偏航弹簧管32,最后穿过所述旋转臂24与驱动部10连接。当后一组关节组件相对于前一组关节组件旋转运动时,弹簧管30同步弯曲变形,如图5所示,由于弹簧管30通过两端台阶结构限制了整体长度,因此在弯曲变形时,弹簧管30的长度将保持不变,从而使内部的驱动钢丝长度不变,保证执行器各个自由度相互独立而不受其他自由度的影响,实现自由度的解耦。
30.如图4所示,所述弹簧管30的内部设置有一层软管33,所述软管33的内部涂抹有润滑脂,以减少驱动钢丝驱动时的摩擦力。驱动钢丝的对应部分穿设在软管内,通过软管33对所述驱动钢丝产生缓冲,使驱动钢丝在同步变形过程中侧面冲击力减小,确保不会对长度产生影响。
31.所述旋转臂24的尾端转动地设置在所述驱动部10,所述旋转臂24通过旋转驱动钢
丝241与所述驱动部10传动连接,所述驱动部10能够通过所述旋转驱动钢丝241向所述旋转臂24传递旋转力进而使所述旋转臂24转动;所述偏航关节机构23包括偏航关节轴232、偏航驱动轮233和偏航关节234,所述偏航关节轴232转动地穿设在所述旋转臂24的首端,所述偏航驱动轮233固定套设在所述偏航关节轴232上,所述偏航关节234固定设置在所述偏航关节轴233上,所述偏航驱动轮233通过偏航驱动钢丝231与所述驱动部10传动连接,所述偏航驱动钢丝231的两端分别与所述驱动部10连接,因此在所述驱动部10控制下所述偏航驱动钢丝231的一端伸长时,另一端相应缩短,控制所述偏航驱动轮233旋转进而带动偏航关节轴232以及偏航关节234旋转,改变执行器偏航转动角度。相似地,所述俯仰关节机构22包括俯仰关节轴222、俯仰驱动轮223和俯仰关节224,所述俯仰关节轴222转动地穿设在所述偏航关节234上,所述俯仰驱动轮223固定套设在所述俯仰关节轴222上,所述俯仰关节224固定设置在所述俯仰关节轴222上,所述俯仰驱动轮223通过俯仰驱动钢丝221与所述驱动部10传动连接,其驱动原理与所述偏航关节组件23类似,此处不再赘述。其中,所述俯仰关节轴222的轴向和偏航关节轴232的轴向相互垂直,令执行器能够产生绕x轴旋转的偏航动作以及绕y轴旋转的俯仰动作,相对于仅有一个腕部弯曲动作的执行器来说更加灵活。
32.如图2和图3所示,所述剪切机构21包括第一剪切手指212、第二剪切手指213、剪切轴214和剪切锥齿轮215,所述第一剪切手指212和第二剪切手指213转动地套设在所述剪切轴214上,所述剪切轴214固定穿设在所述俯仰关节224上,所述第一剪切手指212和第二剪切手指213相向或相对转动时能够实现剪切机构的张开或剪切,所述第一剪切手指212和第二剪切手指213的底部均设置有锥齿轮,所述锥齿轮与所述剪切锥齿轮215啮合,所述剪切锥齿轮215通过剪切驱动钢丝211与所述驱动部10传动连接。所述剪切锥齿轮215的杆体两侧均设置有剪切导向轮216,所述剪切导向轮216的轴向与所述剪切锥齿轮215的轴向垂直,所述剪切驱动钢丝211通过所述剪切导向轮216由直线运动转变为剪切锥齿轮215的旋转运动,通过所述剪切锥齿轮215对所述锥齿轮的传动实现剪切;因此当所述剪切驱动钢丝211第一端下拉时,第二端随之上升,所述剪切锥齿轮215随之转动,所述第一剪切手指212和第二剪切手指213合拢或张开;当所述剪切驱动钢丝211第二端下拉时,第一端随之上升,所述剪切锥齿轮215反方向旋转,所述第一剪切手指212和第二剪切手指213张开或合拢,实现剪切动作。
33.如图6和图7所示,所述驱动部10设置有驱动底座11,所述驱动底座11上转动地设置有旋转驱动滚筒111、偏航驱动滚筒112、俯仰驱动滚筒113和剪切驱动滚筒114,所述旋转驱动钢丝241与所述旋转驱动滚筒111连接,所述旋转驱动钢丝241由所述旋转驱动滚筒111延伸处的两端分别缠绕设置在所述旋转臂24尾端两处轨道上,所述旋转驱动钢丝241的两处轨道缠绕方向相反;连接所述偏航驱动滚筒112的所述偏航驱动钢丝231穿过所述旋转臂24的内部空间连接所述偏航驱动轮233;连接所述俯仰驱动滚筒113的俯仰驱动钢丝221穿过所述旋转臂24的内部空间连接所述俯仰驱动轮223,连接所述剪切驱动滚筒114的所述剪切驱动钢丝211穿过所述旋转臂24的内部空间连接所述剪切锥齿轮215。因此,通过控制所述旋转驱动滚筒111、偏航驱动滚筒112、俯仰驱动滚筒113以及剪切驱动滚筒105的旋转动作,能够分别控制所述旋转臂24、偏航关节234、俯仰关节224和两个剪切手指的旋转运动,并且各部分运动相互独立,由机器人控制系统完成各个滚筒的旋转控制。
34.所述旋转驱动滚筒111、偏航驱动滚筒112、俯仰驱动滚筒113以及剪切驱动滚筒
114分布于驱动底座11的四个对角,驱动底座11的中部设置有滑轮支架12,滑轮支架12上设置有多个钢丝导向件,所述旋转驱动钢丝241绕过旋转导向杆缠绕设置在旋转臂24尾端的两处轨道上,所述偏航驱动钢丝231绕过平行偏航导轮和垂直偏航导轮穿入所述旋转臂24内部,所述俯仰驱动钢丝221绕过平行俯仰导轮和垂直俯仰导轮穿入所述旋转臂24内部,所述剪切驱动钢丝211绕过平行剪切导轮和垂直剪切导轮穿入所述旋转臂24的内部。另外驱动部还包括旋转支撑各滚筒顶部的压盖13以及密封的顶盖14。
35.以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以作出若干改进和润饰,这些改进和润饰也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。