1.本发明的实施例总体上涉及心肺复苏(cpr)设备、用于该设备的控制方法以及用于增强对患者的cpr递送的对应的计算机程序。
背景技术:
2.本发明的总体背景是在心肺复苏(cpr)设备中辅助将cpr递送到患者。cpr涉及用户(救助者)对患者施加胸部按压,以便将含氧血液手动泵送到脑部。cpr期间进行的胸外按压的影响会因多种因素而不同。例如,施加按压力的最优位置在个体患者之间不同。提供适当按压所需的力也可能会变化。
3.cpr设备可以用于帮助用户将cpr递送到患者并因此提高cpr对患者的有效性。可以提供这样的设备以供在提供cpr的用户的手与接受cpr的患者之间使用。从用户到患者的力传递会取决于多种因素,包括所使用的cpr设备的性质和所施加的力。
4.cpr递送不良会对心脏骤停患者造成重大损伤,甚至在第一次按压后也可能发生损伤。类似地,如果按压的深度太浅,则尽管不太可能造成损伤,但是血液流动会较差,这可能导致患者预后较差,例如导致神经系统病症。因此,重要的是,在递送cpr期间施加的胸部按压应具有适当的深度并因此使适当的力从用户传递到患者。
5.期望增强向用户的cpr递送,使得cpr更有效并且cpr对患者的益处提高。还期望最大程度地减小在cpr递送期间对患者和/或用户造成损伤的风险。
技术实现要素:
6.根据本发明的各方面的实施例,cpr设备可以被提供有一个或多个可变性质,使得可以通过该设备的一个或多个可变性质来改变从用户到患者的力传递。本发明的各方面的实施例还扩展到与设备方面相对应的方法方面以及当在计算设备上运行时执行方法的计算机程序方面。
7.根据一个方面的实施例,提供了一种心肺复苏cpr设备,用于增强向患者的cpr递送。所述设备包括:用于与所述患者的胸部接合的患者侧;以及用于与向所述患者递送cpr的用户的手接合的用户侧。所述患者侧和所述用户侧中的一个或多个至少部分地由非牛顿流体形成,所述非牛顿流体的粘度被配置为响应于能量的施加而变化,以便根据由所述用户施加到所述设备并通过所述设备传递到所述患者的力来调节所述设备的力分布轮廓。
8.因此,根据本发明的该方面的实施例,该设备至少部分地由非牛顿流体(nnf)(即,不具有独立于应力的恒定粘度的流体)形成。因此,nnf的粘度响应于被施加到nnf的能量而变化。能量可以是力、应力和/或刺激。例如,能量可以是在为了cpr而递送胸部按压期间由用户在用户侧施加到设备的力,并且nnf的粘度可以随着被施加到设备的力的变化而变化。
9.可以看出,形成cpr设备的至少部分的nnf的可变粘度引起设备的力分布轮廓,其可以随着能量被施加到nnf和nnf的粘度变化而变化。力分布轮廓可以被认为是设备引起的力的分布,并且,如果设备位于患者的胸部,则力分布轮廓可以被认为是在患者侧(特别是
患者的胸部)对患者施加的力的分布。将意识到,如果患者侧至少部分地由nnf形成,则从设备到患者的胸部的力将随着nnf的粘度的变化和患者侧的刚度的变化而变化。类似地,如果用户侧至少部分地由nnf形成,则在用户侧吸收的力或从在用户侧施加的力通过设备传递的力将随着nnf的粘度的变化而变化,并且从设备到患者的胸部的力也因此会变化。因此,可以通过改变nnf的粘度来调节设备的力分布轮廓。
10.通过调节力分布轮廓,可以控制并最大程度地提高cpr递送的有效性。也就是说,可以调节在cpr递送期间被施加到患者的胸部按压的有效性,使得它们对患者和/或用户产生最大积极影响并且/或者最大程度地减小对患者和/或用户的损伤。这是由于nnf的可变粘度允许设备适当调整和控制传递到患者的力。因此,当力被施加到定标器(puck)的用户侧并传递到患者时(例如在向患者递送cpr期间进行胸部按压时),粘度可变的nnf可以调节患者的血液动力学活动。也就是说,可以通过nnf调节设备的力分布轮廓来改善患者的血液动力学活动。
11.取决于nnf在设备中的位置,当设备位于患者的胸部时,该设备可以顺应患者的胸部,并且/或者该设备可以顺应用户的手的形状。例如,如果患者侧(至少部分地)由nnf形成,则当nnf的粘度较低时,患者侧可以(至少部分地)顺应患者的胸部的形状。类似地,如果用户侧(至少部分地)由nnf形成,则当用户接触设备并且nnf的粘度较低时,用户侧可以(至少部分地)顺应用户的手的形状。因此,可以增加设备与患者和/或用户之间的接触。患者侧和用户侧中的每个可以至少部分地由非牛顿流体形成。
12.当能量被施加到nnf时(例如当用户在cpr期间按下设备以向患者递送胸部按压时),nnf的粘度可以变化。例如,粘度可以增加而使得设备的至少部分的刚度增加,并且通过设备的能量传递也增加。也就是说,nnf的粘度可以增加而使得设备变得更牢固并且较大的力通过设备传递到患者。备选地,随着力被施加到设备,nnf的粘度可以降低。nnf对能量的响应可以取决于nnf的类型。
13.考虑其中nnf的粘度随着力的增加而增加的示例,当很少或没有力被施加到设备时,该设备可以(至少部分地)顺应患者的胸部和/或用户的手的形状,因为nnf的粘度较低,并且结果得到的设备刚度也较低。随着被施加到设备的力的增加,nnf的粘度也增加,并且设备(至少部分地)变得更加刚性。因此,与粘度保持较低的情况相比,可以通过该设备向患者传递更大的力,并且与设备的刚度保持较低的情况相比,在患者的胸部上产生的按压可能更深。因此,nnf可以使设备在cpr递送的不同阶段既具有顺应性又具有刚性。因此,至少部分地由nnf形成的cpr设备可以实现顺应性与刚性之间的平衡(以其他方式可能难以实现),并且该设备可以提高使用该设备的舒适度,同时还具有足够的按压有效性。
14.所述cpr设备可以包括控制器,所述控制器被配置为通过将能量施加到所述非牛顿流体来控制所述非牛顿流体的粘度,以便根据由所述用户施加到所述设备的力向所述患者提供目标力分布轮廓。也就是说,控制器可以独立于由用户施加到设备的力而控制粘度,使得控制器可以调节设备的力分布轮廓以实现或接近目标力分布轮廓。因此,可以看出,该设备可以具有其中仅响应于由用户施加的压力而改变nnf的粘度的被动状态和其中也响应于由控制器施加的能量而改变nnf的主动状态。该控制器可以被称为处理器。
15.控制器可以控制nnf的可变粘度,以便提供设备的与目标力分布轮廓相对应的力分布轮廓,该目标力分布轮廓可以在患者中实现或者可以更可能实现期望的血液动力学活
动。控制器可以确定目标力分布轮廓,然后向nnf施加能量,使得设备的力分布轮廓与所确定的目标力分布轮廓相匹配或者至少朝匹配方向移动。因此,患者侧和用户侧中的一个或多个可以至少部分地由具有可变粘度的非牛顿流体形成,该非牛顿流体被配置为由控制器动态控制。
16.所述设备可以包括力传感器,所述力传感器被配置为采集被施加到所述设备的力的力数据,并且所述控制器可以被配置为根据所述力数据来确定所述目标力分布轮廓。因此,可以采集并分析力传感器数据以确定目标力分布轮廓,使得控制器可以被配置为根据被施加到设备的力的测量结果来控制非牛顿流体的粘度。
17.力传感器可以测量被施加到cpr设备的力(例如,在cpr胸部按压的递送期间由用户施加到设备的力)作为力传感器数据。力传感器可以被配置为测量以下各项中的一项或多项:侧向力、纵向力,以及垂直(法向)力。力传感器可以连续测量在给定时间段内,在某个时间点或在给定时间段内的多个时间点被施加到设备的力。力传感器可以采集力传感器数据并将其提供给控制器。可以将全部或仅一些力传感器数据提供给控制器。例如,仅当测得的力超过预定阈值和/或测得的力改变了预定量时,才会将力传感器数据提供给控制器。
18.力传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个力传感器,并且每个力传感器可以测量与另一力传感器测量的力不同类型或相同类型的力。力传感器可以被认为是压力传感器。
19.控制器可以被配置为使用最近期采集的力传感器数据来周期性地重新确定目标力分布轮廓。控制器因此可以基于被施加到设备的力来动态控制nnf流体的粘度,以便基于更近期的数据来最大程度地提高递送到患者的胸部按压的有效性和/或最大程度地减小对患者和/或用户的损伤。例如,力传感器可以测量在胸部按压期间被施加到设备的力,并且控制器可以改变nnf的粘度,使得随后的胸部按压(其可能会产生相似的作用力)对患者产生最大积极影响。例如,如果由控制器确定测得的力相对低,则控制器可以向nnf施加增加粘度的能量,使得设备的刚度增加并且较多的力传递到患者。相反,如果控制器确定测得的力相对高,则控制器可以向nnf施加减小粘度的能量,使得设备的刚度降低并且较小的力传递到患者,以便最小化对患者和/或用户造成损伤的风险。
20.所述设备可以与患者传感器能通信地耦合,所述患者传感器被配置为收集与所述患者的状况有关的患者传感器数据。所述设备可以被配置为从所述患者传感器接收所述患者传感器数据。所述控制器可以被配置为根据所述患者传感器数据来确定所述目标力分布轮廓。因此,可以采集并分析患者传感器数据以确定目标力分布轮廓,使得控制器可以被配置为基于指示患者的状况的数据来控制非牛顿流体的粘度。患者传感器数据可以被认为是表示患者的状况,指示患者的状况和/或与患者的状况有关。
21.患者传感器可以测量指示患者的状况的患者的参数或体征作为患者传感器数据。例如,患者传感器可以采集指示患者的以下参数中的一个或多个的传感器数据:心律;血压;皮肤状况(例如,水分、油性和弹性);冠状动脉灌注压(cpp);向脑部递送的血液;全身递送的注射的治疗剂;检测到和分析出的内部或外部出血;检测到的皮下软组织和骨损伤;以及血液动力学行为。因此,患者的血液动力学活动可以是要由患者传感器监测的患者的状况。
22.患者传感器可以包括标准超声成像或uwb(超宽带)雷达,以对心肌和邻近脉管系
统的活动进行成像并确定心肌和邻近脉管系统的活动。患者传感器可以包括超声成像以测量患者的血压。额外地或备选地,患者传感器可以包括一个或多个压力传感器,以确定骨损伤(例如,对肋骨的损伤),这可以经由cpr设备上的压力轮廓的改变来检测。患者传感器可以测量血液动力学行为并根据该行为来预测在整个循环系统中递送的注射的治疗剂。患者传感器可以包括确定患者的皮肤的水分的电容测量器件、确定患者的皮肤的油性和发红的光学传感器和/或确定患者的皮肤的弹性的振动传感器。患者传感器可以包括被配置为捕获患者的图像的相机,并且控制器可以被配置为通过分析所捕获的图像来确定患者的状况。相机可以顺序地捕获个体帧或多个帧。
23.患者传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量患者参数或体征。患者传感器可以采集患者传感器数据并将其提供给控制器。可以将全部或仅一些患者传感器数据提供给控制器。例如,仅当测得的参数或体征超过预定阈值和/或测得的参数或体征改变了预定量时,才会将患者传感器数据提供给控制器。
24.控制器可以被配置为使用最近期采集的患者传感器数据来周期性地重新确定目标力分布轮廓。因此,控制器可以基于患者的状况来动态控制nnf流体的粘度,以便基于患者的当前状态来提供对患者最有益的力分布轮廓。
25.患者传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个患者传感器,其中的每个患者传感器测量与另一患者传感器测量的参数或体征不同或相同的参数或体征。
26.所述设备可以与用户传感器能通信地耦合,所述用户传感器被配置为收集与所述用户的状况有关的用户传感器数据。所述设备可以被配置为从所述用户传感器接收所述用户传感器数据。所述控制器可以被配置为根据所述用户传感器数据来确定所述目标力分布轮廓。因此,可以采集并分析用户传感器数据以确定目标力分布轮廓,使得控制器可以被配置为基于指示用户的状况的数据来控制非牛顿流体的粘度。用户传感器数据可以被认为是表示用户的状况,指示用户的状况和/或与用户的状况有关。
27.用户传感器可以测量指示用户的状况的用户参数或体征作为用户传感器数据。例如,用户传感器可以采集指示用户的以下参数中的一个或多个的传感器数据:心率;血压;皮肤状况;身体移动;情绪状态;呼吸速率;身体几何形状;以及身体位置。
28.用户传感器可以包括由用户穿戴并用于确定身体移动、几何形状和/或位置的可穿戴传感器。用户传感器可以包括具有确定心律不齐和/或血压的传感器的智能设备。用户传感器可以包括捕获用户的图像并确定用户的状态的相机。例如,可以通过分析呼吸速率和/或所采集的图像中的面部表情的不适来确定状态。相机可以顺序地捕获个体帧或多个帧。用户传感器可以包括确定用户的皮肤的水分的电容测量器件、确定用户的皮肤的油性和发红的光学传感器和/或确定用户的皮肤的弹性的振动传感器。用户传感器可以包括位于设备的用户侧的压力或光学传感器,以在用户的手接触用户侧时确定用户的心率。用户传感器可以包括被配置为捕获用户的音频数据的麦克风,并且控制器可以被配置为分析所捕获的音频数据以确定用户的状况。用户传感器可以包括被配置为测量用户的心率的心率传感器。
29.用户传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量用户参数或体征。用户传感器可以采集用户传感器数据并将其提供给控制器。可
以将全部或仅一些用户传感器数据提供给控制器。例如,仅当测得的参数或体征超过预定阈值和/或测得的参数或体征改变了预定量时,才会将用户传感器数据提供给控制器。
30.控制器可以被配置为使用最近期采集的用户传感器数据来周期性地重新确定目标力分布轮廓。因此,控制器可以基于用户的状况来动态控制nnf流体的粘度,以便基于用户的当前状态来提供对患者和/或用户最有益的力分布轮廓。
31.用户传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个用户传感器,其中的每个用户传感器测量与另一用户传感器测量的用户参数或体征不同或相同的用户参数或体征。
32.所述设备可以与被配置为存储关于所述患者的信息的存储器能通信地耦合。所述设备可以被配置为从所述存储器采集关于所述患者的信息。所述控制器可以被配置为根据所述关于所述患者的信息来确定所述目标力分布轮廓。
33.关于患者的信息可以包括以下各项中的一项或多项:患者的年龄;患者的健康状况;患者的生命体征;患者的医学诊断;以及与过去向患者的cpr递送有关的历史患者数据。因此,可以采集并分析关于患者的信息以确定目标力分布轮廓,使得控制器可以被配置为基于关于患者的信息来控制非牛顿流体的粘度。
34.存储器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个存储器,其中的每个存储器存储与另一存储器中存储的信息不同或相同的关于患者的信息。
35.所述设备可以与被配置为存储关于所述用户的信息的存储器能通信地耦合。所述设备可以被配置为从所述存储器采集关于所述用户的信息。所述控制器可以被配置为根据所述关于所述用户的信息来确定所述目标力分布轮廓。
36.关于用户的信息可以包括以下各项中的一项或多项:用户的年龄;用户的身份;用户的健康状况;用户的生命体征;用户的医学诊断;与过去的cpr递送有关的历史用户数据;用户的体型;用户的体重;用户的年龄;用户的医疗资格;用户的医学培训;以及用户的健身水平。因此,可以采集并分析关于用户的信息以确定目标力分布轮廓,使得控制器可以被配置为基于关于用户的信息来控制非牛顿流体的粘度。
37.存储器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个存储器,其中的每个存储器存储与另一存储器中存储的信息不同或相同的关于用户的信息。此外,可以将关于患者的信息与关于用户的信息存储在相同的存储器或不同的存储器中。
38.由所述非牛顿流体形成的所述患者侧和所述用户侧中的一个或多个可以被隔离成多个流体部分。所述控制器可以被配置为独立于所述多个流体部分中的其他流体部分中的一个或多个来控制所述多个流体部分中的一个流体部分的所述非牛顿流体的粘度。因此,该设备可以包括多个部分或单元,每个部分或单元包含可以独立于其他部分或单元中的nnf而受控的nnf。因此,流体部分可以跨由nnf形成的患者侧和用户侧中的一个或多个提供像素化控制。可以独立控制每个部分处的按压力,并且控制器可以根据多个流体部分来确定目标力分布轮廓。
39.所述非牛顿流体是以下各项中的一项:剪切增稠流体;剪切稀化流体;以及流变流体。可以针对cpr期间存在的力的范围来设计并优化流体的类型或流体的剪切增稠动力学。
40.尽管由于个体间差异而导致不同患者的最优胸部按压深度所需的比力会有所不同,但是已为不同组(例如,成人、儿童、婴儿、男性、女性等)识别了范围。例如,男性和女性所需的力可以分别在320n
±
80n和270n
±
70n的范围内。因此,可以基于旨在使用该设备的患者组以及该患者组所需的力来确定nnf的类型。
41.由非牛顿流体形成的患者侧和用户侧中的一个或多个可以被隔离成多个流体部分;并且所述多个流体部分中的一个流体部分的非牛顿流体可以不同于所述多个流体部分中的其他流体部分中的一个或多个的非牛顿流体。
42.由所述控制器施加的所述能量可以是以下各项中的一项或多项:被施加到所述非牛顿流体的电场;被施加到所述非牛顿流体的超声波;被施加到所述非牛顿流体的磁场;以及被施加到所述非牛顿流体的振动。因此,可以使用上述刺激中的一种或多种来控制nnf的粘度。可以通过nnf的性质和/或cpr设备的用途来确定要使用的刺激的类型。例如,超声换能器可以用于独立于由用户施加到设备的力来调制nnf的刚度。该设备可以包括多个流体部分,并且用于控制一个流体部分中的nnf的能量可以与用于控制另一流体部分中的nnf的能量相同或不同。流体部分中的一个或多个均可以被提供有超声换能器。
43.剪切增稠流体(stf)是非牛顿流体,其性质会基于剪切力的施加而变化。它们在低水平的力的作用下可以是柔软而舒适的,但在被施加较高水平的力时会变硬并表现得更像实心物体。可以调整stf的配方以调谐流体的性质,包括粘度、临界剪切速率、储能模量和/或损耗模量。可以使用例如电场、磁场和/或振动来动态改变stf的性质。
44.流变流体是非牛顿流体,其中随着施加的剪切力变大,粘度会随时间增加。这可以例如允许该设备随时间适应用户和患者,并且即使在力被移除时也保持该定制形状。非牛顿流体的粘度可以被配置为随时间变化,使得在第一时间点的非牛顿流体的粘度不同于在第一时间点之后发生的第二时间点的非牛顿流体的粘度。
45.剪切稀化流体是非牛顿流体,其中流体的粘度在剪切应变下降低。这可以例如减小过度按压的风险,因为当施加可能导致过度按压的力时,流体的粘度以及设备的刚度会降低。
46.该设备可以包括致动器,并且控制器可以被配置为操作致动器以向非牛顿流体施加力并控制非牛顿流体的粘度。致动器可以是柔软的致动器。致动器可以由控制器激活和停用,使得其扩展和按压以向nnf施加压力和释放压力。该设备可以包括多个致动器,这多个致动器可以被独立控制为在不同的位置向nnf施加不同的压力。可以将由非牛顿流体形成的患者侧和用户侧中的一个或多个隔离成多个流体部分,并且可以在流体部分中的一个或多个中的每个中提供致动器。
47.所述设备可以包括加速度计,所述加速度计被配置为通过在多个时间点测量所述设备的加速度来采集加速度数据。所述控制器可以被配置为:根据所述加速度数据来确定当力被施加到所述设备时所述设备移动的距离;并且根据所述距离来控制所述非牛顿流体的粘度。因此,可以测量并分析加速度以确定当力被施加时设备移动的距离,从而确定胸部按压的深度。然后可以确定目标力分布轮廓,使得控制器可以被配置为根据所确定的在cpr递送期间施加的胸部按压的按压深度以及目标按压深度来控制非牛顿流体的粘度。
48.控制器可以被配置为使用最近期采集的加速度数据并因此使用最近确定的按压深度来周期性地重新确定目标力分布轮廓。因此,控制器可以基于按压深度来动态控制nnf
流体的粘度,以基于最近的数据最大程度地提高后续递送到患者的胸部按压的有效性。
49.在进行cpr和用户向患者的胸部施加力时,按压循环开始时不会对胸部施加任何力,然后持续增加施加的力,直到达到最大按压深度为止,然后随着力的释放而返回到起点。因此可以根据加速度数据来确定按压循环。例如,可以通过观察加速度随时间的变化来确定执行按压循环所花费的时间。也就是说,可以使用加速度的增加和改变来确定何时开始按压循环,何时达到最大按压深度以及何时结束按压循环。可以例如通过对加速度计数据进行二次积分来确定按压深度,以确定在按压循环的顶部位置和底部位置之间行进的距离,从而确定最大按压深度。
50.加速度计可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量设备的加速度。加速度计可以采集加速度数据并将其提供给控制器。可以将全部或仅一些加速度数据提供给控制器。例如,仅当测得的加速度超过预定阈值和/或测得的加速度改变了预定量时,才会将加速度数据提供给控制器。
51.所述设备可以与被配置为采集位于所述患者的所述胸部上的所述设备的图像数据的相机能通信地耦合。所述设备可以被配置为从所述相机接收所述图像数据。所述控制器可以被配置为:使用所述图像数据来确定所述设备相对于所述患者的所述胸部的位置,并且根据所述设备相对于所述患者的所述胸部的所述位置来确定所述目标力分布轮廓。因此,可以采集并分析图像数据以确定目标力分布轮廓,使得控制器可以被配置为根据图像数据来控制非牛顿流体的粘度,根据该图像数据,可以确定设备在患者的胸部上的位置。
52.相机可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续捕获图像作为图像数据。相机可以顺序地捕获个体帧或多个帧。相机可以采集图像数据并将其提供给控制器。可以将全部或仅一些图像数据提供给控制器。控制器可以采集图像数据并且可以执行图像处理以识别设备、患者以及设备相对于患者的胸部的位置。可以至少部分地通过设备的位置来确定目标力分布轮廓。例如,患者的胸部上的某些位置可能需要较大的力通过该设备传递到患者,而某些位置可能需要较小的力。
53.相机可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个相机,每个相机被配置为从不同角度采集图像数据。
54.控制器可以被配置为使用最近期采集的图像数据来周期性地重新确定目标力分布轮廓。因此,控制器可以基于所识别的设备相对于患者的胸部的位置来动态控制nnf流体的粘度,以便基于设备的更近期位置来最大程度地提高递送到患者的胸部按压的有效性。例如,控制器可以确定在胸部按压期间设备的位置,并且控制器可以改变nnf的粘度,使得随后的胸部按压将在所确定的位置处对患者产生最大积极影响。例如,如果确定设备位于患者的胸部上的骨骼更牢固的位置,则控制器可以向nnf施加增加粘度的能量,使得设备的刚度增加并且较多的力传递到患者。相反,如果确定设备位于患者的胸部的较弱的位置,则控制器可以向nnf施加减小粘度的能量,使得设备的刚度降低并且较小的力传递到患者,以便最大程度地减小对患者造成损伤的风险。
55.所述设备可以包括被设置在所述设备的所述患者侧上的多个压力传感器,并且每个压力传感器可以被配置为采集被施加到所述设备的压力的压力传感器数据。所述控制器可以被配置为:使用所采集的压力传感器数据来确定所述设备相对于所述患者的所述胸部的位置,并且根据所述设备相对于所述患者的所述胸部的所述位置来确定所述目标力分布
轮廓。因此,可以采集并分析压力传感器数据以确定目标力分布轮廓,使得控制器可以被配置为根据设备上的压力的测量结果来控制非牛顿流体的粘度。
56.压力传感器可以测量cpr设备的患者侧的压力作为压力传感器数据。压力传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量患者侧的压力。并非所有压力传感器都会同时激活,并且可以将压力传感器分成一个或多个组,其中的每个组在不同时间点或按压循环的不同部分测量压力。压力传感器可以采集压力传感器数据并将其提供给控制器。可以将全部或仅一些压力传感器数据提供给控制器。例如,仅当测得的压力超过预定阈值和/或测得的压力改变了预定量时,才会将压力传感器数据提供给控制器。
57.控制器可以采集压力传感器数据并且可以执行对压力传感器数据的分析以识别设备相对于患者的胸部的位置。例如,传感器上的较高压力读数可以指示该设备位于骨骼结构(例如,太阳神经丛和肋骨)上,而较低压力读数可以指示该设备位于软组织上的位置(例如,肋骨与隔膜边缘之间的间隙)。可以至少部分地通过设备的位置来确定目标力分布轮廓。例如,患者的胸部上的某些位置可能需要较大的力通过该设备传递到患者,而某些位置可能需要较小的力。
58.由非牛顿流体形成的患者侧和用户侧中的一个或多个可以被隔离成多个流体部分。多个流体部分中的一个或多个均可以被提供有压力传感器。控制器可以被配置为基于在多个流体部分中的一个流体部分处测量的压力并且独立于多个流体部分中的其他流体部分中的一个或多个来控制该流体部分的非牛顿流体的粘度。
59.控制器可以被配置为确定设备相对于患者的胸部的目标位置。控制器可以被配置为将目标位置与设备的位置进行比较以确定目标位置与设备的位置之间的差异。控制器可以被配置为根据该差异来确定目标力分布轮廓,以便最大程度地减小该差异。也就是说,可以确定在力被施加到设备时将设备移动到目标位置或者可能将设备移动到目标位置的目标力分布。
60.所述设备可以包括被设置在设备的患者侧上的多个压力传感器,并且每个压力传感器可以被配置为采集被施加到设备的压力的压力传感器数据。控制器可以被配置为在多个时间点监测压力传感器数据。控制器可以在多个时间点中的第二时间点确定压力传感器数据的变化,该第二时间点晚于多个时间点中的第一时间点。控制器可以被配置为根据压力传感器数据的变化来确定目标力分布轮廓。因此,可以采集并分析压力传感器数据以确定目标力分布轮廓,使得控制器可以被配置为根据在患者侧的设备上的压力的测量结果来控制非牛顿流体的粘度。
61.超过预定阈值的压力传感器数据的变化可以指示对患者的胸部的损伤。也就是说,可以通过cpr设备的患者侧上的压力传感器的压力轮廓的变化来检测例如对患者的肋骨的骨损伤。
62.控制器可以被配置为使用最近期采集的压力传感器数据来周期性地重新确定目标力分布轮廓。因此,控制器可以基于在设备的患者侧的更近期检测到的压力来动态控制nnf流体的粘度,以便最大程度地提高递送到患者的胸部按压的有效性。例如,压力传感器可以测量患者侧的压力,并且控制器可以基于测得的压力来确定设备在患者的胸部上的位置。替代地或额外地,控制器可以使用测得的压力来确定对患者的损伤(例如,骨折)。控制
器然后可以改变nnf的粘度,以满足适合于设备的位置和/或对患者的损伤的目标力分布轮廓。例如,如果测得的压力确定对患者没有损伤,则控制器可以向nnf施加产生相对高的粘度的能量,使得设备的刚度增加并且较多的力传递到患者。相反,如果根据测得的压力确定对患者有损伤,则控制器可以向nnf施加减小粘度的能量,使得设备的刚度降低并且较小的力传递到患者,以便最大程度地减小对患者造成损伤的风险。
63.控制器可以基于来自多个传感器(例如,力传感器、患者传感器和用户传感器)的信息来确定目标力分布轮廓并控制nnf的可变粘度。例如,可以编译来自多个传感器的传感器数据以确定用户和/或患者的状况以及胸部按压的质量和/或力。备选地,最近期采集的传感器数据可以用于确定目标力分布轮廓并因此用于控制nnf的粘度,而与数据类型无关。备选地,可以知道一些传感器比其他传感器更准确、更可靠和/或更能指示患者和/或用户的状况,因此当分析传感器数据并确定目标力分布轮廓时,对来自这些传感器的传感器数据进行加权会更有利。备选地或额外地,可以对传感器进行排名,并且仅当从同等或更高排名的传感器采集了更近期的数据时才会替换在其上确定目标力分布轮廓的传感器数据。可以在cpr递送期间采集传感器数据,并且可以基于所采集的数据来控制nnf的粘度,使得在cpr递送期间动态控制粘度。
64.本发明扩展到与设备方面相对应的方法方面。
65.根据另一方面的实施例,提供了一种用于心肺复苏cpr设备的控制方法,所述cpr设备用于增强向患者的cpr递送,所述设备包括用于与所述患者的胸部接合的患者侧和用于与向所述患者递送cpr的用户的手接合的用户侧,其中,所述患者侧和所述用户侧中的一个或多个至少部分地由非牛顿流体形成,所述非牛顿流体的粘度被配置为响应于能量的施加而变化,以便根据从所述用户施加到所述设备并通过所述设备传递到所述患者的力来调节所述设备的力分布轮廓,所述方法包括:采集以下数据类型中的一种或多种:被施加到所述设备的力的力数据;与所述患者的状况有关的患者传感器数据;与所述用户的状况有关的用户传感器数据;关于所述患者的信息;关于所述用户的信息;所述设备在多个时间点的加速度的加速度数据;位于所述患者的所述胸部上的所述设备的图像数据;以及被施加到所述设备的压力的压力传感器数据;并且根据所采集的数据类型中的一种或多种,通过将能量施加到所述非牛顿流体来控制所述非牛顿流体的粘度,以便根据由所述用户施加到所述设备的力向所述患者提供目标力分布轮廓。
66.因此,根据一个方面的实施例,还可以提供一种控制cpr设备的可变粘度的方法。可以基于从cpr设备和/或从包括cpr设备的系统的元件采集的一种或多种数据类型来控制可变粘度。
67.设备方面的特征和子特征可以应用于方法方面,反之亦然。
68.本发明扩展到计算机程序方面,所述计算机程序方面当在计算设备上被运行时执行根据本发明的方法方面中的任一方法方面或其任意组合的控制方法。
69.特别地,根据另一方面的实施例,提供了一种计算机程序,所述计算机程序当在计算设备上被运行时执行用于心肺复苏cpr设备的控制方法,所述cpr设备用于增强向患者的cpr递送,所述设备包括用于与所述患者的胸部接合的患者侧和用于与向所述患者递送cpr的用户的手接合的用户侧,其中,所述患者侧和所述用户侧中的一个或多个至少部分地由非牛顿流体形成,所述非牛顿流体的粘度被配置为响应于能量的施加而变化,以便根据从
所述用户施加到所述设备并通过所述设备传递到所述患者的力来调节所述设备的力分布轮廓,所述方法包括:采集以下数据类型中的一种或多种:被施加到所述设备的力的力数据;与所述患者的状况有关的患者传感器数据;与所述用户的状况有关的用户传感器数据;关于所述患者的信息;关于所述用户的信息;所述设备在多个时间点的加速度的加速度数据;位于所述患者的所述胸部上的所述设备的图像数据;以及被施加到所述设备的压力的压力传感器数据;并且根据所采集的数据类型中的一种或多种,通过将能量施加到所述非牛顿流体来控制所述非牛顿流体的粘度,以便根据由所述用户施加到所述设备的力向所述患者提供目标力分布轮廓。
70.根据另一方面的实施例,提供了一种心肺复苏cpr设备,用于增强向患者的cpr递送,所述设备包括:用于与所述患者的胸部接合的患者侧;以及用于与向所述患者递送cpr的用户的手接合的用户侧,其中,所述患者侧的表面和所述用户侧的表面中的一个或多个至少部分地由具有可变接触特性的材料形成,所述具有可变接触特性的材料被配置为受到控制,以便根据由所述用户施加到所述设备并通过所述设备传递到所述患者的力来调节所述患者侧的表面和所述用户侧的表面中的一个或多个上的侧向力分布轮廓。
71.因此,根据本发明的这个方面的实施例,设备的表面至少部分地由具有可变接触特性的材料(即,具有可以变化的接触特性的材料)形成。可以控制接触特性而使得可以响应于在用户侧施加的力(例如,胸部按压的力)而调节患者侧和/或用户侧的侧向力分布轮廓。例如,可以控制接触特性而使得通过增大和减小侧向力来调节在患者侧的设备的侧向力。
72.可以看出,形成cpr设备的至少部分的材料的可变接触特性引起设备在包括可以随着用户向设备施加力而受到控制的材料的(一个或多个)表面上的侧向力分布轮廓。侧向力分布轮廓可以被认为是由设备施加的侧向力的分布,并且,如果设备位于患者的胸部并且患者侧至少部分地由具有可变接触特性的材料形成,则侧向力分布轮廓可以被认为是侧向力对患者侧的患者的胸部的分布。类似地,如果用户的手与设备的用户侧接合并且用户侧至少部分地由具有可变接触特定的材料形成,则侧向力分布轮廓可以被认为是侧向力对用户侧的用户的手的分布。侧向力可以被认为是与设备的表面或设备所接触的表面平行的力。侧向力可以处于侧向平面上的任何方向。
73.通过调节侧向力分布轮廓,可以控制并最大程度地提高cpr递送的有效性。也就是说,可以调节在cpr递送期间被施加到患者的胸部按压的有效性,使得它们对患者和/或用户产生最大影响和/或最大程度地减小对患者和/或用户的损伤。因此,当力被施加到设备的用户侧时,具有可变接触特性的材料可以调节患者的血液动力学活动。例如,通过控制具有可变接触特性的材料,可以改变或维持设备的位置,以便例如将设备定位在患者的胸部上的胸部按压可能更有效的位置。因此,通过用具有可变接触特性的材料调节设备的侧向力分布轮廓,可以改善患者的血液动力学活动。可变接触特性可以抵抗或促进设备在特定侧向方向上的移动,以便在用户将力施加到设备时对设备进行定位。此外,可以通过控制接触特性来最大程度地减小对患者和/或用户的损伤(例如,受损或破裂的皮肤和擦伤)。
74.所述设备可以包括控制器,所述控制器被配置为控制材料的可变接触特性,以便根据由用户施加到设备的力提供在患者侧的表面和用户侧的表面中的一个或多个上的目标侧向力分布轮廓。也就是说,可变接触特性可以由控制器控制而使得设备的侧向力分布
轮廓可以由控制器调节以实现目标侧向力分布轮廓。控制器可以被称为处理器。
75.控制器可以控制材料的可变接触特性,以提供与目标侧向力分布轮廓相对应的设备的侧向力分布轮廓,该目标侧向力分布轮廓可以在患者中实现或者更可能实现期望的血液动力学活动。控制器可以确定目标侧向力分布轮廓,然后控制材料的可变接触特性,使得设备的侧向力分布轮廓与所确定的目标侧向力分布轮廓相匹配或者至少朝匹配方向移动。因此,患者侧和用户侧中的一个或多个可以至少部分地由具有可变接触特性的材料形成,所述具有可变接触特性的材料被配置为由控制器动态控制。
76.接触特性可以是摩擦和粘附中的一种或多种。也就是说,可以认为该材料具有可变的摩擦性质和/或可变的粘附性质。因此,可以控制和改变该材料的摩擦和/或粘附,使得该材料的摩擦和/或粘附改变侧向力分布轮廓。可以看出,该材料的粘附和/或摩擦的增加可以在该表面与该设备正在接触的另一表面之间引起该表面上的侧向力增大。相反,粘附和/或摩擦的降低可以在该表面与该设备正在接触的另一表面之间引起该表面上的侧向力减小。可以动态控制材料的粘附和/或摩擦性质。
77.将意识到,如果患者侧至少部分地由具有可变接触特性的材料形成,则从设备到患者的胸部的侧向力将随着接触特性受控而变化。类似地,如果用户侧至少部分地由具有可变接触特性的材料形成,则用户的手与设备之间的力将随着接触特性受控而变化。因此,可以通过控制材料的接触特性(例如,摩擦和/或粘附)来调节设备的侧向力分布轮廓。
78.所述设备可以包括力传感器,所述力传感器被配置为采集被施加到所述设备的力的力传感器数据。所述控制器可以被配置为根据力传感器数据来确定目标侧向力分布轮廓。因此,可以采集并分析力传感器数据以确定目标侧向力分布轮廓,使得控制器被配置为根据被施加到设备的力的测量结果来控制可变接触特性。
79.力传感器可以测量被施加到cpr设备的力(例如,在cpr递送期间由用户施加到设备的力)作为力传感器数据。力传感器可以被配置为测量以下各项中的一项或多项:侧向力、纵向力,以及垂直(法向)力。力传感器可以连续测量在给定时间段内,在某个时间点或在给定时间段内的多个时间点被施加到设备的力。力传感器可以采集力传感器数据并将其提供给控制器。可以将全部或仅一些力传感器数据提供给控制器。例如,仅当测得的力超过预定阈值和/或测得的力改变了预定量时,才会将力传感器数据提供给控制器。
80.力传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个力传感器,并且每个力传感器可以测量与另一力传感器测量的力不同类型或相同类型的力。力传感器也可以被认为是压力传感器。
81.控制器可以被配置为使用最近期采集的力传感器数据来周期性地重新确定目标力分布轮廓。控制器因此可以基于最近期确定的被施加到设备的力来动态控制材料的接触特性,以便最大程度地提高递送到患者的胸部按压的有效性和/或最大程度地减小对患者和//或用户的损伤。例如,力传感器可以测量在胸部按压期间被施加到设备的力,并且控制器可以改变接触特性,使得随后的胸部按压(其可能会产生相似的作用力)对患者产生最大积极影响。
82.所述设备可以与患者传感器能通信地耦合,所述患者传感器被配置为收集与所述患者的状况有关的患者传感器数据。所述设备可以被配置为从所述患者传感器接收所述患者传感器数据。所述控制器可以被配置为根据所述患者传感器数据来确定所述目标侧向力
分布轮廓。因此,可以采集并分析患者传感器数据以确定目标侧向力分布轮廓,使得控制器可以被配置为基于指示患者的状况的数据来控制材料的接触特性。患者传感器数据可以被认为是表示患者的状况,指示患者的状况和/或与患者的状况有关。
83.患者传感器可以测量指示患者的状况的患者的参数或体征作为患者传感器数据。例如,患者传感器可以采集指示患者的以下参数中的一个或多个的传感器数据:心律;血压;皮肤状况(例如,水分、油性和弹性);冠状动脉灌注压(cpp);向脑部递送的血液;全身递送的注射的治疗剂;检测到和分析出的内部或外部出血;检测到的皮下软组织和骨损伤;以及血液动力学行为。
84.患者传感器可以包括标准超声成像或uwb雷达,以对心肌和邻近脉管系统的活动进行成像并确定心肌和邻近脉管系统的活动。患者传感器可以包括超声成像以测量患者的血压。额外地或备选地,患者传感器可以包括一个或多个压力传感器,以确定骨损伤(例如,对肋骨的损伤),这可以经由cpr设备上的压力轮廓的改变来检测。患者传感器可以测量血液动力学行为并根据该行为来预测在整个循环系统中递送的注射的治疗剂。患者传感器可以包括确定患者的皮肤的水分的电容测量器件、确定患者的皮肤的油性和发红的光学传感器和/或确定患者的皮肤的弹性的振动传感器。
85.患者传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量患者参数或体征。患者传感器可以采集患者传感器数据并将其提供给控制器。可以将全部或仅一些患者传感器数据提供给控制器。例如,仅当测得的参数或体征超过预定阈值和/或测得的参数或体征改变了预定量时,才会将患者传感器数据提供给控制器。
86.控制器可以被配置为使用最近期采集的患者传感器数据来周期性地重新确定目标侧向力分布轮廓。因此,控制器可以基于患者的状况来动态控制材料的接触特性,以便递送对患者和/或用户最有益的侧向力分布轮廓。
87.患者传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个患者传感器,其中的每个患者传感器测量与另一患者传感器测量的参数或体征不同或相同的参数或体征。
88.所述设备可以与用户传感器能通信地耦合,所述用户传感器被配置为收集与所述用户的状况有关的用户传感器数据。所述设备可以被配置为从所述用户传感器接收所述用户传感器数据。所述控制器可以被配置为根据所述用户传感器数据来确定所述目标侧向力分布轮廓。因此,可以采集并分析用户传感器数据以确定目标侧向力分布轮廓,使得控制器可以被配置为基于指示用户的状况的数据来控制材料的接触特性。用户传感器数据可以被认为是表示用户的状况,指示用户的状况和/或与用户的状况有关。
89.用户传感器可以测量指示用户的状况的用户参数或体征作为用户传感器数据。例如,用户传感器可以采集指示用户的以下参数中的一个或多个的传感器数据:心率;血压;皮肤状况;身体移动;情绪状态;呼吸速率;以及身体几何形状和位置。
90.用户传感器可以包括由用户穿戴并用于确定身体移动、几何形状和/或位置的可穿戴传感器。用户传感器可以包括具有确定心律不齐和/或血压的传感器的智能设备。用户传感器可以包括捕获用户的图像并确定用户的状态的相机。例如,可以通过分析呼吸速率和/或所采集的图像中的面部表情的不适来确定状态。相机可以顺序地捕获个体帧或多个帧。用户传感器可以包括确定用户的皮肤的水分的电容测量器件、确定用户的皮肤的油性
和发红的光学传感器和/或确定用户的皮肤的弹性的振动传感器。用户传感器可以包括位于设备的用户侧的压力或光学传感器,以在用户的手接触用户侧时确定用户的心率。用户传感器可以包括被配置为捕获用户的音频数据的麦克风,并且控制器可以被配置为分析所捕获的音频数据以确定用户的状况。用户传感器可以包括被配置为测量用户的心率的心率传感器。
91.用户传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量用户参数或体征。用户传感器可以采集用户传感器数据并将其提供给控制器。可以将全部或仅一些用户传感器数据提供给控制器。例如,仅当测得的参数或体征超过预定阈值和/或测得的参数或体征改变了预定量时,才会将用户传感器数据提供给控制器。
92.控制器可以被配置为使用最近期采集的用户传感器数据来周期性地重新确定目标侧向力分布轮廓。因此,控制器可以基于用户的状况来动态控制材料的接触特性,以便递送对患者和/或用户最有益的侧向力分布轮廓。
93.用户传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个用户传感器,其中的每个用户传感器测量与另一用户传感器测量的用户参数或体征不同或相同的用户参数或体征。
94.所述设备可以与存储器能通信地耦合。所述设备可以被配置为从所述存储器采集关于所述患者的信息。所述控制器可以被配置为根据所述关于所述患者的信息来确定所述目标力分布轮廓。
95.关于患者的信息可以包括以下各项中的一项或多项:患者的年龄;患者的健康状况;患者的生命体征;患者的医学诊断;以及与过去向患者的cpr递送有关的历史患者数据。因此,可以采集并分析关于患者的信息以确定目标侧向力分布轮廓,使得控制器可以被配置为基于关于患者的信息来控制材料的接触特性。
96.存储器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个存储器,其中的每个存储器存储与另一存储器中存储的信息不同或相同的关于患者的信息。
97.所述设备可以与存储器能通信地耦合。所述设备可以被配置为从所述存储器采集关于所述用户的信息。所述控制器可以被配置为根据所述关于所述用户的信息来确定所述目标侧向力分布轮廓。
98.关于用户的信息可以包括以下各项中的一项或多项:用户的年龄;用户的身份;用户的健康状况;用户的生命体征;用户的医学诊断;与过去的cpr递送有关的历史用户数据;用户的体型;用户的体重;用户的年龄;用户的医疗资格;用户的医学培训;以及用户的健身水平。因此,可以采集并分析关于用户的信息以确定目标侧向力分布轮廓,使得控制器可以被配置为基于关于用户的信息来控制材料的接触特性。
99.存储器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个存储器,其中的每个存储器存储与另一存储器中存储的信息不同或相同的关于用户的信息。此外,可以将关于患者的信息与关于用户的信息存储在相同的存储器或不同的存储器中。
100.由具有可变接触特性的材料形成的所述患者侧的表面和所述用户侧的表面中的一个或多个可以被隔离成多个流体部分。所述控制器可以被配置为独立于所述多个流体部
分中的其他流体部分中的一个或多个来控制所述多个流体部分中的一个流体部分的所述材料的可变接触特性。因此,该设备可以包括多个部分或单元,每个部分或单元由具有可变接触特性的材料形成,该可变接触特性可以独立于其他部分或单元的接触特性而受到控制。
101.可以独立控制每个部分处的摩擦和/或粘附,并且控制器可以根据多个材料部分来确定目标侧向力分布轮廓。因此,材料部分可以跨由具有可变接触特性的材料形成的患者侧的表面和用户侧的表面中的一个或多个提供像素化控制。例如,可以将足以防止设备从某个位置滑动或移动的摩擦/粘附施加到未受损伤的皮肤区处的材料部分,而可以减小在皮肤受到损伤的区处的单元的摩擦/粘附。
102.控制器可以被配置为使用以下各项中的一项或多项来控制材料的可变接触特性:电粘附;超声;以及表面设计。因此,可以使用上述刺激中的一种或多种来控制材料的接触特性。可以通过材料的性质和/或cpr设备的应用来确定要使用的刺激类型。
103.由具有可变接触特性的材料形成的患者侧的表面和用户侧的表面中的一个或多个可以被隔离成多个材料部分。所述多个材料部分中的一个材料部分的材料可以不同于所述多个材料部分中的其他材料部分中的一个或多个的材料。
104.所述设备可以与被配置为采集位于所述患者的所述胸部上的所述设备的图像数据的相机能通信地耦合。所述设备可以被配置为从所述相机接收所述图像数据。所述控制器可以被配置为:确定所述设备相对于所述患者的所述胸部的位置,并且根据所述设备相对于所述患者的所述胸部的所述位置来确定所述目标侧向力分布轮廓。因此,可以采集并分析图像数据以确定目标侧向力分布轮廓,使得控制器可以被配置为根据识别设备在患者的胸部上的位置的图像数据来控制材料的接触特性。
105.相机可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续捕获图像作为图像数据。相机可以顺序地捕获个体帧或多个帧。相机可以采集图像数据并将其提供给控制器。可以将全部或仅一些图像数据提供给控制器。控制器可以采集图像数据并且可以执行图像处理以识别设备、患者以及设备相对于患者的胸部的位置。可以至少部分地通过设备的位置来确定目标侧向力分布轮廓。例如,可以增大或减小材料的摩擦和/或粘附,使得当用户向设备施加力时,设备朝着患者的胸部上的目标位置移动,或者更可能朝着患者的胸部上的目标位置移动。
106.相机可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个相机,每个相机被配置为从不同角度采集图像数据。
107.控制器可以被配置为使用最近期采集的图像数据来周期性地重新确定目标侧向力分布轮廓。因此,控制器可以基于所识别的设备相对于患者的胸部的位置来动态控制材料的接触特性,以便最大程度地提高递送到患者的胸部按压的有效性和/或最大程度地减小对患者和/或用户的损伤。例如,控制器可以确定在胸部按压期间设备的位置,并且控制器可以改变材料的摩擦和/或粘附,使得随后的胸部按压将在所确定的位置处对患者产生最大积极影响或将对患者和/或用户造成最小损伤。
108.所述设备可以包括被设置在所述设备的所述患者侧上的多个压力传感器,并且每个压力传感器可以被配置为采集被施加到所述设备的压力的压力传感器数据。所述控制器可以被配置为:使用所采集的压力传感器数据来确定所述设备相对于所述患者的所述胸部
的位置,并且根据所述设备相对于所述患者的所述胸部的所述位置来确定所述目标侧向力分布轮廓。因此,可以采集并分析压力传感器数据以确定目标侧向力分布轮廓,使得控制器可以被配置为根据患者侧的设备上的压力的测量结果来控制材料的接触特性。
109.压力传感器可以测量cpr设备的患者侧的压力作为压力传感器数据。压力传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量患者侧的压力。并非所有压力传感器都会同时激活,并且可以将压力传感器分成一个或多个组,其中的每个组在不同时间点或按压循环的不同部分测量压力。压力传感器可以采集压力传感器数据并将其提供给控制器。可以将全部或仅一些压力传感器数据提供给控制器。例如,仅当测得的压力超过预定阈值和/或测得的压力改变了预定量时,才会将压力传感器数据提供给控制器。
110.控制器可以采集压力传感器数据并且可以执行对压力传感器数据的分析以识别设备相对于患者的胸部的位置。例如,传感器上的较高压力读数可以指示该设备位于骨骼结构(例如,太阳神经丛和肋骨)上,而较低压力读数可以指示该设备位于软组织上的位置(例如,肋骨与隔膜边缘之间的间隙)。可以至少部分地通过设备的位置来确定目标侧向力分布轮廓。
111.由具有可变接触特性的材料形成的患者侧的表面和用户侧的表面中的一个或多个可以被隔离成多个流体部分。控制器可以被配置为基于在多个流体部分中的一个流体部分处测量的压力并且独立于多个流体部分中的其他流体部分中的一个或多个来控制该流体部分的材料的可变接触特性。
112.控制器可以被配置为确定设备相对于患者的胸部的目标位置。控制器可以被配置为将目标位置与设备的位置进行比较以确定目标位置与设备的位置之间的差异。控制器可以被配置为根据该差异来确定目标侧向力分布轮廓,以便最大程度地减小该差异。也就是说,可以确定在力被施加到设备时将设备移动到目标位置或者可能将设备移动到目标位置的目标侧向力分布。
113.所述设备可以包括被设置在设备的患者侧上的多个压力传感器,并且每个压力传感器可以被配置为采集被施加到设备的压力的压力传感器数据。控制器可以被配置为在多个时间点监测压力传感器数据。控制器可以在多个时间点中的第二时间点确定压力传感器数据的变化,该第二时间点晚于多个时间点中的第一时间点。控制器可以被配置为根据压力传感器数据的变化来确定目标侧向力分布轮廓。因此,可以采集并分析压力传感器数据以确定目标侧向力分布轮廓,使得控制器可以被配置为根据在患者侧的设备上的压力的测量结果来控制材料的接触特性。
114.压力传感器数据的变化超过预定阈值可以指示对患者的胸部的损伤。也就是说,可以通过cpr设备的患者侧上的压力传感器的压力轮廓的变化来检测例如对患者的肋骨的骨损伤。因此,控制器可以例如减小位于被识别为受到损伤的位置处的材料的摩擦和/或粘附。
115.控制器可以被配置为使用最近期采集的压力传感器数据来周期性地重新确定目标侧向力分布轮廓。因此,控制器可以基于在设备的患者侧检测到的压力来动态控制材料的接触特性,以便最大程度地提高递送到患者的胸部按压的有效性和/或最大程度地减小对患者和/或用户的损伤。
116.控制器可以被配置为根据关于设备的信息(例如,设备的大小和/或形状)来确定目标侧向力分布轮廓。可以存在关于设备的信息并且/或者可以从存储器中采集关于设备的信息。因此,控制器可以结合设备的形状和/或大小来控制可变接触特性,使得在按压循环期间的力的施加引起cpr设备以受控的方式侧向移动,直到到达期望的位置为止。
117.控制器可以基于来自多个传感器(例如,力传感器、患者传感器和用户传感器)的信息来控制材料的接触特性。例如,可以编译来自多个传感器的传感器数据以确定用户和/或患者的状况、胸部按压的质量和/或力,和/或设备在患者的胸部上的位置。备选地,最近期采集的传感器数据可以用于确定目标侧向力分布轮廓并因此用于控制材料的接触特性,而与数据类型无关。备选地,可以知道一些传感器比其他传感器更准确、更可靠和/或更能指示患者和/或用户的状况,因此当分析传感器数据并确定目标侧向力分布轮廓时,对来自这些传感器的传感器数据进行加权会更有利。备选地或额外地,可以对传感器进行排名,并且仅当从同等或更高排名的传感器采集了更近期的数据时才会替换在其上确定目标侧向力分布轮廓的传感器数据。可以在cpr递送期间采集传感器数据,并且可以基于所采集的数据来控制接触特性,使得在cpr递送期间动态控制接触特性。
118.本发明扩展到与设备方面相对应的方法方面。
119.特别地,根据另一方面的实施例,提供了一种用于心肺复苏cpr设备的控制方法,所述cpr设备用于增强向患者的cpr递送,所述设备包括用于与所述患者的胸部接合的患者侧和用于与向所述患者递送cpr的用户的手接合的用户侧,其中,所述患者侧的表面和所述用户侧的表面中的一个或多个至少部分地由具有可变接触特性的材料形成,所述具有可变接触特性的材料被配置为受到控制,以便根据由所述用户施加到所述设备并通过所述设备传递到所述患者的力来调节所述患者侧的表面和所述用户侧的表面中的一个或多个上的侧向力分布轮廓,所述方法包括:采集以下数据类型中的一种或多种:被施加到所述设备的力的力数据;与所述患者的状况有关的患者传感器数据;与所述用户的状况有关的用户传感器数据;关于所述患者的信息;关于所述用户的信息;位于所述患者的所述胸部上的所述设备的图像数据;以及被施加到所述设备的压力的压力传感器数据;并且根据所采集的数据类型中的一种或多种来控制所述材料的可变接触特性,以便根据由所述用户施加到所述设备的力来提供在所述表面上的目标侧向力分布轮廓。
120.因此,根据一个方面的实施例,还可以提供一种控制cpr设备的可变接触特性的方法。可以基于从设备和/或从包括cpr设备的系统的元件采集的一种或多种数据类型来控制可变接触特性。
121.设备方面的特征和子特征可以应用于方法方面,反之亦然。
122.本发明扩展到计算机程序方面,所述计算机程序方面当在计算设备上被运行时执行根据本发明的方法方面中的任一方法方面或其任意组合的控制方法。
123.特别地,根据另一方面的实施例,提供了一种计算机程序,所述计算机程序当在计算设备上被运行时执行用于心肺复苏cpr设备的控制方法,所述cpr设备用于增强向患者的cpr递送,所述设备包括用于与所述患者的胸部接合的患者侧和用于与向所述患者递送cpr的用户的手接合的用户侧,其中,所述患者侧的表面和所述用户侧的表面中的一个或多个至少部分地由具有可变接触特性的材料形成,所述具有可变接触特性的材料被配置为受到控制,以便根据由所述用户施加到所述设备并通过所述设备传递到所述患者的力来调节所
述患者侧的表面和所述用户侧的表面中的一个或多个上的侧向力分布轮廓,所述方法包括:采集以下数据类型中的一种或多种:被施加到所述设备的力的力数据;与所述患者的状况有关的患者传感器数据;与所述用户的状况有关的用户传感器数据;关于所述患者的信息;关于所述用户的信息;位于所述患者的所述胸部上的所述设备的图像数据;以及被施加到所述设备的压力的压力传感器数据;并且根据所采集的数据类型中的一种或多种来控制所述材料的可变接触特性,以便根据由所述用户施加到所述设备的力来提供在所述表面上的目标侧向力分布轮廓。
124.根据另一方面的实施例,提供了一种心肺复苏cpr设备,用于增强向患者的cpr递送,所述设备包括:用于与所述患者的胸部接合的患者侧;以及用于与向所述患者递送cpr的用户的手接合的用户侧,以及致动器,其被配置为至少部分地改变所述患者侧和所述用户侧中的一个或多个的外部形式,以便调节所述患者侧和所述用户侧中的所述一个或多个的形状轮廓。
125.因此,根据本发明的这个方面的实施例,可以至少部分地改变设备的外部形式,使得改变设备的整体形状。因此,可以通过致动器的操作来调节设备的形状轮廓。通过在患者侧和/或用户侧调节设备的形状轮廓,可以控制和最大程度地提高cpr递送的有效性。也就是说,可以调节在cpr递送期间被施加到患者的胸部按压的有效性,使得它们对患者和/或用户产生最大影响和/或最大程度地减小对患者和/或用户的损伤。这是因为可以根据由用户施加的力来改变该设备的可变形状以改变通过该设备传递到患者的力。对形状轮廓的调节因此可以根据由用户施加到设备并通过设备传递到患者的力来调节设备的力分布轮廓,从而优化患者的血液动力学活动/血液动力学。因此,可以通过由致动器调节设备的形状轮廓来改善患者的血液动力学活动。
126.设备的形状轮廓可以被认为是设备的形状或外形/外部形式。因此,设备的形状轮廓包括用户侧的外部形式和患者侧的外部形式。因此,致动器可以被操作为改变设备的形状。还可以意识到,致动器的操作可以至少部分地改变设备的厚度。
127.该设备可以包括控制器,该控制器被配置为控制致动器,以便提供患者侧和用户侧中的一个或多个的目标形状轮廓。也就是说,致动器可以由控制器控制而使得设备的形状轮廓可以由控制器来调节以实现目标力分布轮廓。该控制器可以被称为处理器。
128.目标形状轮廓可以对应于目标力分布轮廓,使得控制器操作致动器以提供形状轮廓,该形状轮廓可以在力被施加到设备时提供或者更可能提供目标力分布轮廓。因此,控制器可以控制致动器,以便提供与目标力分布轮廓相对应的设备的力分布轮廓,该目标力分布轮廓可以在患者中实现或者可能更可能实现期望的血液动力学活动。控制器可以确定目标力分布轮廓,然后操作致动器以实现与所确定的目标力分布轮廓相匹配或者至少朝着匹配所确定的目标力分布轮廓移动的力分布轮廓相对应的形状轮廓。因此,设备的形状轮廓可以由控制器动态控制。
129.控制器可以被配置为激活和停用致动器,以便按压和扩展致动器。也就是说,控制器对致动器的操作可以引起致动器进行按压或扩展。取决于致动器在设备中的定位和取向,致动器的按压和扩展可以引起用户侧或患者侧的外部形式的至少部分分别进行按压和扩展。例如,控制器可以引起致动器扩展,使得用户侧和/或患者侧的部分突出于该侧的其余部分之上。
130.所述设备可以包括力传感器,所述力传感器被配置为采集被施加到所述设备的力的力数据。控制器可以被配置为根据力数据来确定目标形状轮廓。因此,可以采集并分析力传感器数据以确定目标形状轮廓,使得控制器被配置为根据施加到设备的力的测量结果来控制致动器。因此,可以采集并分析力传感器数据以确定目标形状轮廓,使得控制器可以被配置为根据施加到设备的力的测量结果来控制致动器。
131.力传感器可以测量被施加到cpr设备的力(例如,在cpr递送期间由用户施加到设备的力)作为力传感器数据。力传感器可以被配置为测量以下各项中的一项或多项:侧向力、纵向力,以及垂直(法向)力。力传感器可以连续测量在给定时间段内,在某个时间点或在给定时间段内的多个时间点被施加到设备的力。力传感器可以采集力传感器数据并将其提供给控制器。可以将全部或仅一些力传感器数据提供给控制器。例如,仅当测得的力超过预定阈值和/或测得的力改变了预定量时,才会将力传感器数据提供给控制器。
132.力传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个力传感器,并且每个力传感器可以测量与另一力传感器测量的力不同类型或相同类型的力。力传感器可以被认为是压力传感器。
133.控制器可以被配置为使用最近期采集的力传感器数据来周期性地重新确定目标形状轮廓。控制器因此可以基于被施加到设备的力来动态控制致动器的操作,以便最大程度地提高递送到患者的胸部按压的有效性和/或最大程度地减小对患者和/或用户的损伤。例如,力传感器可以测量在胸部按压期间被施加到设备的力,并且控制器可以改变致动器,使得随后的胸部按压(其可能会产生相似的作用力)对患者产生最大积极影响。例如,如果测得的力相对低,则控制器可以扩展致动器,使得设备的大小增大并且较多的力传递到患者。相反,如果测得的力相对高,则控制器可以按压致动器,使得设备的大小减小并且较小的力传递到患者,以便最大程度地减小对患者和/或用户造成损伤的风险。
134.所述设备可以与患者传感器能通信地耦合,所述患者传感器被配置为收集与所述患者的状况有关的患者传感器数据。所述设备可以被配置为从所述患者传感器接收所述患者传感器数据。所述控制器可以被配置为根据所述患者传感器数据来确定所述目标形状轮廓。因此,可以采集并分析患者传感器数据以确定目标形状轮廓,使得控制器可以被配置为基于指示患者的状况的数据来控制致动器。患者传感器数据可以被认为是表示患者的状况,指示患者的状况和/或与患者的状况有关。
135.患者传感器可以测量指示患者的状况的患者的参数或体征作为患者传感器数据。例如,患者传感器可以采集指示患者的以下参数中的一个或多个的传感器数据:心律;血压;皮肤状况(例如,水分、油性和弹性);冠状动脉灌注压(cpp);向脑部递送的血液;全身递送的注射的治疗剂;检测到和分析出的内部或外部出血;检测到的皮下软组织和骨损伤;以及血液动力学行为。
136.患者传感器可以包括标准超声成像或uwb雷达,以对心肌和邻近脉管系统的活动进行成像并确定心肌和邻近脉管系统的活动。患者传感器可以包括超声成像以测量患者的血压。额外地或备选地,患者传感器可以包括一个或多个压力传感器,以确定骨损伤(例如,对肋骨的损伤),这可以经由cpr设备上的压力轮廓的改变来检测。患者传感器可以测量血液动力学行为并根据该行为来预测在整个循环系统中递送的注射的治疗剂。患者传感器可以包括确定患者的皮肤的水分的电容测量器件、确定患者的皮肤的油性和发红的光学传感
器和/或确定患者的皮肤的弹性的振动传感器。患者传感器可以包括被配置为捕获患者的图像的相机,并且控制器可以被配置为通过分析所捕获的图像来确定患者的状况。相机可以顺序地捕获个体帧或多个帧。
137.患者传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量患者参数或体征。患者传感器可以采集患者传感器数据并将其提供给控制器。可以将全部或仅一些患者传感器数据提供给控制器。例如,仅当测得的参数或体征超过预定阈值和/或测得的参数或体征改变了预定量时,才会将患者传感器数据提供给控制器。
138.控制器可以被配置为使用最近期采集的患者传感器数据来周期性地重新确定目标形状轮廓。因此,控制器可以基于患者的状况来动态控制致动器,以便递送对患者最有益的形状轮廓。
139.患者传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个患者传感器,其中的每个患者传感器测量与另一患者传感器测量的参数或体征不同或相同的参数或体征。
140.所述设备可以与用户传感器能通信地耦合,所述用户传感器被配置为收集与所述用户的状况有关的用户传感器数据。所述设备可以被配置为从所述用户传感器接收所述用户传感器数据。所述控制器可以被配置为根据所述用户传感器数据来确定所述目标形状轮廓。因此,可以采集并分析用户传感器数据以确定目标形状轮廓,使得控制器可以被配置为基于指示用户的状况的数据来控制致动器。用户传感器数据可以被认为是表示用户的状况,指示用户的状况和/或与用户的状况有关。
141.用户传感器可以测量指示用户的状况的用户参数或体征作为用户传感器数据。例如,用户传感器可以采集指示用户的以下参数中的一个或多个的传感器数据:心率;血压;皮肤状况;身体移动;情绪状态;呼吸速率;以及身体几何形状和位置。
142.用户传感器可以包括由用户穿戴并用于确定身体移动、几何形状和/或位置的可穿戴传感器。用户传感器可以包括具有确定心律不齐和/或血压的传感器的智能设备。用户传感器可以包括捕获用户的图像并确定用户的状态的相机。例如,可以通过分析呼吸速率和/或所采集的图像中的面部表情的不适来确定状态。相机可以顺序地捕获个体帧或多个帧。用户传感器可以包括确定用户的皮肤的水分的电容测量器件、确定用户的皮肤的油性和发红的光学传感器和/或确定用户的皮肤的弹性的振动传感器。用户传感器可以包括位于设备的用户侧的压力或光学传感器,以在用户的手接触用户侧时确定用户的心率。用户传感器可以包括被配置为捕获用户的音频数据的麦克风,并且控制器可以被配置为分析所捕获的音频数据以确定用户的状况。用户传感器可以包括被配置为测量用户的心率的心率传感器。
143.用户传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量用户参数或体征。用户传感器可以采集用户传感器数据并将其提供给控制器。可以将全部或仅一些用户传感器数据提供给控制器。例如,仅当测得的参数或体征超过预定阈值和/或测得的参数或体征改变了预定量时,才会将用户传感器数据提供给控制器。
144.控制器可以被配置为使用最近期采集的用户传感器数据来周期性地重新确定目标形状轮廓。因此,控制器可以基于用户的状况来动态控制致动器,以便递送对患者和/或用户最有益的形状轮廓。
145.用户传感器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个用户传感器,其中的每个用户传感器测量与另一用户传感器测量的用户参数或体征不同或相同的用户参数或体征。
146.所述设备可以与被配置为存储关于所述患者的信息的存储器能通信地耦合。所述设备可以被配置为从所述存储器采集关于所述患者的信息。所述控制器可以被配置为根据所述关于所述患者的信息来确定所述目标形状轮廓。
147.关于患者的信息可以包括以下各项中的一项或多项:患者的年龄;患者的健康状况;患者的生命体征;患者的医学诊断;以及与过去向患者的cpr递送有关的历史患者数据。因此,可以采集并分析关于患者的信息以确定目标形状轮廓,使得控制器可以被配置为基于关于患者的信息来控制致动器。
148.存储器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个存储器,其中的每个存储器存储与另一存储器中存储的信息不同或相同的关于患者的信息。
149.所述设备可以与被配置为存储关于所述患者的信息的存储器能通信地耦合。所述设备可以被配置为从所述存储器采集关于所述用户的信息。所述控制器可以被配置为根据所述关于所述用户的信息来确定所述目标形状轮廓。
150.关于用户的信息可以包括以下各项中的一项或多项:用户的年龄;用户的身份;用户的健康状况;用户的生命体征;用户的医学诊断;与过去的cpr递送有关的历史用户数据;用户的体型;用户的体重;用户的年龄;用户的医疗资格;用户的医学培训;以及用户的健身水平。因此,可以采集并分析关于用户的信息以确定目标形状轮廓,使得控制器可以被配置为基于关于用户的信息来控制致动器。
151.存储器可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个存储器,其中的每个存储器存储与另一存储器中存储的信息不同或相同的关于用户的信息。此外,可以将关于患者的信息与关于用户的信息存储在相同的存储器或不同的存储器中。
152.所述设备可以与被配置为采集位于所述患者的所述胸部上的所述设备的图像数据的相机能通信地耦合。所述设备可以被配置为从所述相机接收所述图像数据。所述控制器可以被配置为:使用所述图像数据来确定所述设备相对于所述患者的所述胸部的位置,并且根据所述设备相对于所述患者的所述胸部的所述位置来确定所述目标形状轮廓。因此,可以采集并分析图像数据以确定目标形状轮廓,使得控制器可以被配置为根据识别设备在患者的胸部上的位置的图像数据来控制致动器。
153.相机可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续捕获图像作为图像数据。相机可以顺序地捕获个体帧或多个帧。相机可以采集图像数据并将其提供给控制器。可以将全部或仅一些图像数据提供给控制器。控制器可以采集图像数据并且可以执行图像处理以识别设备、患者以及设备相对于患者的胸部的位置。可以至少部分地通过设备的位置来确定目标形状轮廓。例如,患者的胸部上的某些位置可以更适合于具有较大外部形状的设备,而某些位置可以更适合于较小的设备。
154.相机可以被提供为cpr设备的部分,或者可以被提供为包括该设备的系统的部分。可以利用多个相机,每个相机被配置为从不同角度采集图像数据。
155.控制器可以被配置为使用最近期采集的图像数据来周期性地重新确定目标形状轮廓。因此,控制器可以基于所识别的设备相对于患者的胸部的位置来动态控制致动器,以便最大程度地提高递送到患者的胸部按压的有效性。例如,控制器可以确定在胸部按压期间设备的位置,并且控制器可以操作致动器,使得随后的胸部按压将在所确定的位置处对患者产生最大积极影响。
156.所述设备可以包括被设置在所述设备的所述患者侧上的多个压力传感器,并且每个压力传感器可以被配置为采集被施加到所述设备的压力的压力传感器数据。所述控制器可以被配置为:使用所采集的压力传感器数据来确定所述设备相对于所述患者的所述胸部的位置,并且根据所述设备相对于所述患者的所述胸部的所述位置来确定所述目标形状轮廓。因此,可以采集并分析压力传感器数据以确定目标形状轮廓,使得控制器可以被配置为根据在患者侧的设备上的压力的测量结果来控制致动器。
157.压力传感器可以测量cpr设备的患者侧的压力作为压力传感器数据。压力传感器可以在给定时间段内,在某个时间点或在给定时间段内的多个时间点连续测量患者侧的压力。并非所有压力传感器都会同时激活,并且可以将压力传感器分成一个或多个组,其中的每个组在不同时间点或按压循环的不同部分测量压力。压力传感器可以采集压力传感器数据并将其提供给控制器。可以将全部或仅一些压力传感器数据提供给控制器。例如,仅当测得的压力超过预定阈值和/或测得的压力改变了预定量时,才会将压力传感器数据提供给控制器。
158.控制器可以采集压力传感器数据并且可以执行对压力传感器数据的分析以识别设备相对于患者的胸部的位置。例如,传感器上的较高压力读数可以指示该设备位于骨骼结构(例如,太阳神经丛和肋骨)上,而较低压力读数可以指示该设备位于软组织上的位置(例如,肋骨与隔膜边缘之间的间隙)。可以至少部分地通过设备的位置来确定目标形状轮廓。例如,在患者的胸部上的某些位置可以需要至少部分增大的外部形式。
159.控制器可以被配置为确定设备相对于患者的胸部的目标位置。控制器可以被配置为将目标位置与设备的位置进行比较以确定目标位置与设备的位置之间的差异。控制器可以被配置为根据该差异来确定目标形状轮廓,以便最大程度地减小该差异。也就是说,可以确定在力被施加到设备时将设备移动到目标位置或者可能将设备移动到目标位置的目标形状轮廓。
160.所述设备可以包括被设置在设备的患者侧上的多个压力传感器,并且每个压力传感器可以被配置为采集被施加到设备的压力的压力传感器数据。控制器可以被配置为在多个时间点监测压力传感器数据。控制器可以在多个时间点中的第二时间点确定压力传感器数据的变化,该第二时间点晚于多个时间点中的第一时间点。控制器可以被配置为根据压力传感器数据的变化来确定目标形状轮廓。因此,可以采集并分析压力传感器数据以确定目标形状轮廓,使得控制器可以被配置为根据在患者侧的设备上的压力的测量结果来控制致动器。
161.压力传感器数据的变化超过预定阈值可以指示对患者的胸部的损伤。也就是说,可以通过cpr设备的患者侧上的压力传感器的压力轮廓的变化来检测例如对患者的肋骨的骨损伤。
162.控制器可以被配置为使用最近期采集的压力传感器数据来周期性地重新确定目
标形状轮廓。因此,控制器可以基于在设备的患者侧检测到的压力来动态控制致动器,以便最大程度地提高递送到患者的胸部按压的有效性。例如,压力传感器可以测量患者侧的压力,并且控制器可以基于测得的压力来确定设备在患者的胸部上的位置。替代地或额外地,控制器可以使用测得的压力来确定对患者的损伤(例如,骨折)。控制器然后可以操作致动器以满足适合于设备的位置和/或对患者的损伤的目标形状轮廓。
163.所述设备可以包括多个致动器。控制器可以被配置为独立于多个致动器中的其他致动器中的一个或多个来控制多个致动器中的第一致动器。因此,所述设备可以包括多个致动器,并且每个致动器可以独立于其他致动器而受到控制。因此,个体致动器操作可以跨用户侧和/或患者侧提供像素化控制。也就是说,用户侧和/或患者侧的外部形式的部分可以独立于该侧的另一部分而改变。因此,外部形式的改变可以被定位在与致动器相对应的位置。控制器可以根据多个致动器来确定目标形状轮廓。
164.所述设备可以包括多个致动器,每个致动器被提供有对应的压力传感器。控制器可以被配置为基于由对应的压力传感器测量的压力并且独立于多个致动器中的其他致动器中的一个或多个来控制多个致动器中的第一致动器。
165.致动器可以是液压放大的自修复静电致动器。该设备可以包括液压放大的自修复静电(hasel)致动器的阵列,该hasel致动器可以嵌入用户侧和患者侧中的一个或多个并且覆盖有柔性表面。柔性表面可以填充有非牛顿流体(例如,剪切增稠流体)。一个致动器的电激活会引起在该致动器的位置处的设备厚度相对于相邻致动器的情况发生改变,从而引起表面在致动器之间形成斜坡。因此,可以通过控制致动器来调节设备的形状轮廓和合力分布轮廓。
166.控制器可以被配置为控制致动器,使得患者侧和用户侧中的一个或多个的部分从患者侧和用户侧中的一个或多个的表面突出。也就是说,致动器可以被操作为使得用户侧和/或患者侧的部分突出于该侧的表面的其余部分之上。因此,例如来自用户的被施加到该设备的垂直力可以被转换为还包括侧向分量以及垂直分量。因此,可以通过控制致动器来调节设备的形状轮廓和合力分布轮廓。
167.本发明扩展到与设备方面相对应的方法方面。
168.特别地,根据另一方面的实施例,提供了一种用于心肺复苏cpr设备的控制方法,所述cpr设备用于增强向患者的cpr递送,所述设备包括:用于与所述患者的胸部接合的患者侧;用于与向所述患者递送cpr的用户的手接合的用户侧;以及致动器,其被配置为至少部分地改变所述患者侧和所述用户侧中的一个或多个的外部形式,以便调节所述患者侧和所述用户侧中的所述一个或多个的形状轮廓,所述方法包括:采集以下数据类型中的一种或多种:被施加到所述设备的力的力数据;与所述患者的状况有关的患者传感器数据;与所述用户的状况有关的用户传感器数据;关于所述患者的信息;关于所述用户的信息;所述设备在多个时间点的加速度的加速度数据;位于所述患者的所述胸部上的所述设备的图像数据;以及被施加到所述设备的压力的压力传感器数据;并且根据所采集的数据类型中的一种或多种来控制所述致动器,以便提供所述患者侧和所述用户侧中的所述一个或多个的目标形状轮廓。
169.因此,根据一个方面的实施例,还可以提供一种控制cpr设备的形状轮廓的方法。可以基于从设备和/或从包括cpr设备的系统的元件采集的一种或多种数据类型来控制设
备的致动器,以便至少部分地改变cpr设备的外部形式。
170.设备方面的特征和子特征可以应用于方法方面,反之亦然。
171.本发明扩展到计算机程序方面,所述计算机程序方面当在计算设备上被运行时执行根据本发明的方法方面中的任一方法方面或其任意组合的控制方法。
172.特别地,根据另一方面的实施例,提供了一种计算机程序,所述计算机程序当在计算设备上被运行时执行用于心肺复苏cpr设备的控制方法,所述cpr设备用于增强向患者的cpr递送,所述设备包括:用于与所述患者的胸部接合的患者侧;用于与向所述患者递送cpr的用户的手接合的用户侧;以及致动器,其被配置为至少部分地改变所述患者侧和所述用户侧中的一个或多个的外部形式,以便调节所述患者侧和所述用户侧中的所述一个或多个的形状轮廓,所述方法包括:采集以下数据类型中的一种或多种:被施加到所述设备的力的力数据;与所述患者的状况有关的患者传感器数据;与所述用户的状况有关的用户传感器数据;关于所述患者的信息;关于所述用户的信息;所述设备在多个时间点的加速度的加速度数据;位于所述患者的所述胸部上的所述设备的图像数据;以及被施加到所述设备的压力的压力传感器数据;并且根据所采集的数据类型中的一种或多种来控制所述致动器,以便提供所述患者侧和所述用户侧中的所述一个或多个的目标形状轮廓。
173.上述方面可以与其他方面中的一个或多个进行组合,使得cpr设备可以包括一个以上的可变性质,并且控制方法方面可以类似地进行组合。因此,本发明扩展到cpr设备和对应的控制方法,其中,cpr设备至少部分地由具有可变粘度的材料形成和/或至少部分地由具有可变接触特性的材料形成和/或包括被配置为至少部分改变设备的外部形式的致动器。各个方面的特征在作必要修改后均适用于其他方面,反之亦然。
174.设备的用户侧适合于与用户的手接合,并且患者侧适合于与患者的胸部接合,使得cpr设备可以在cpr递送期间被设置在患者的胸部与用户的手之间。也就是说,cpr设备可以位于患者的胸部,并且当在cpr递送期间提供胸部按压时,用户可以与cpr设备接合。
175.术语患者可以用于描述正在遭受或者怀疑遭受心脏骤停的个体,即,由于心脏无法进行有效泵送而导致的血流突然丧失。因此,患者是正在接受包括胸外按压在内的心肺复苏(cpr)的个体。
176.术语用户可以用于描述准备向患者递送cpr(或至少cpr的胸部按压)或者正在向患者递送cpr(或至少cpr的胸部按压)的个体或救助者。可以将用户视为使用cpr设备的个体,并且用户可以在开始cpr之前将cpr设备定位在患者的胸部上。用户还可以是在cpr递送期间向患者提供胸部按压的机器,其中,cpr设备位于患者的胸部与递送胸部按压的机器之间。如果使用了机器,则控制器可以从机器采集指示要递送的按压的力的机器数据,并且可以根据机器数据来控制cpr设备的一个或多个可变性质。
177.cpr设备的大小和形状可以变化并且可以例如根据设备的预期应用来决定。该设备可以被设计为具有针对不同群体(例如,儿童、成人或老人)定制的特定性质(大小、刚度等)。例如,旨在与儿童一起使用的cpr设备的大小和形状可以与旨在与成年人一起使用的cpr设备的大小和形状不同。类似地,设备的可变性质的变化可以变化并且可以根据预期的应用而变化。例如,在考虑旨在与儿童一起使用的设备的情况下,nnf的最大粘度可以小于旨在与成人一起使用的设备的nnf的最大粘度。类似地,用于与儿童一起使用的设备的可变接触特性可以不同于用于与成人一起使用的设备的可变接触特性,使得儿童的设备的侧向
力分布轮廓的幅值小于成人的设备的侧向力分布轮廓的幅值。最后,对于具有可变形状轮廓的cpr设备,旨在用于儿童的设备与旨在用于成人的设备相比,设备的形状的变化的幅值可以较小。
178.包括用户侧和患者侧的cpr设备也可以被称为定标器或cpr定标器。根据本发明的各方面的实施例的cpr设备也可以被提供为cpr系统的部分,该cpr系统包括cpr设备和用于采集可以用于确定对cpr设备的控制的数据的相关联的设备。例如,cpr系统可以包括根据本发明的各方面的实施例的cpr设备以及以下元件中的一项或多项:力传感器、患者传感器、用户传感器、存储器、加速度计、成像设备以及压力传感器。该系统可以包括元件中的每个元件中的一个或多个。
179.因此,本发明的实施例扩展到cpr设备以及包括该cpr设备和其他相关设备和/或元件的系统。设备方面的特征在作必要修改后适用于系统方面,反之亦然。
180.本发明的各方面(例如,控制器)可以以数字电子电路或计算机硬件、固件、软件或其组合来实施。本发明的各方面可以被实施为计算机程序或计算机程序产品,即,(例如以机器可读存储设备或传播的信号的形式)有形地体现在信息载体中的计算机程序,以用于由一个或多个硬件模块运行或者控制一个或多个硬件模块的操作。计算机程序可以是独立程序、计算机程序部分或一个以上的计算机程序的形式,并且可以以任何形式的编程语言(包括编译或解释的语言)来编写,并且可以以任何形式进行部署,包括作为独立程序或者作为模块、部件、子例程或其他适合在通信系统环境中使用的单元。计算机程序可以被部署为在一个站点上的一个模块或多个模块上运行,或者分布在多个站点上并通过通信网络互连。能通信地耦合的元件可以连接到同一网络。
181.本发明的方法步骤的各方面可以由一个或多个可编程处理器来执行,这一个或多个可编程处理器运行计算机程序以通过对输入数据进行操作并生成输出来执行本发明的功能。本发明的装置的各方面可以被实现为编程的硬件或专用逻辑电路,包括例如fpga(现场可编程门阵列)或asic(专用集成电路)。
182.例如,适合于运行计算机程序的处理器既包括通用微处理器又包括专用微处理器,并且还包括任何种类的数字计算机的任何一个或多个处理器。通常,处理器将从只读存储器或随机存取存储器或这两者接收指令和数据。计算机的基本元件是用于运行被耦合到一个或多个用于存储指令和数据的存储器设备的指令的处理器。
183.因此,可以看出,本发明的实施例可以提供用于通过提供具有一个或多个可变性质的cpr设备和用于该cpr设备的控制方法来增强向患者的cpr递送的手段。在向患者递送cpr期间,设备的一种或多种性质可以变化,使得在整个cpr递送期间,设备与患者和/或设备与用户之间的相互作用可能不一致。通过cpr设备的一种或多种可变性质,可以降低在cpr递送期间对患者和/或用户造成损伤的风险。
附图说明
184.本公开内容的实施例可以采取各种部件和部件布置以及各个步骤和步骤安排的形式。因此,附图是出于图示各种实施例的目的,而不应被解释为对实施例的限制。在附图中,相同的附图标记指代相同的元件。另外,应当注意,附图可能并未按比例绘制。
185.图1是根据本发明的一般实施例的心肺复苏cpr设备的框图;
186.图2是根据本发明的一般实施例的用于心肺复苏cpr设备的控制方法的流程图;
187.图3是根据本发明的一个方面的实施例的cpr系统的框图;
188.图4是根据本发明的一个方面的实施例的用于cpr系统的控制方法的流程图;
189.图5是根据本发明的实施例的cpr设备的示意图;
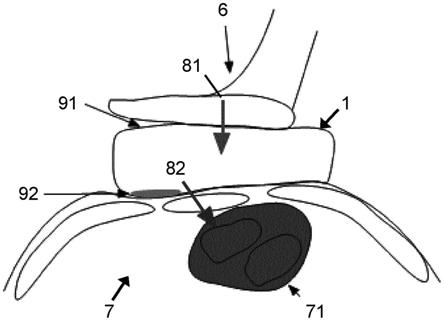
190.图6是根据本发明的实施例的在由用户向患者递送cpr期间使用的cpr设备的示意图;并且
191.图7是根据本发明的实施例的在由用户向患者递送cpr期间使用的cpr设备的示意图。
具体实施方式
192.参考在附图中描述和/或图示的并且在以下描述中详细描述的非限制性示例,更充分地解释了本公开内容的实施例及其各个特征和有利细节。应当注意,附图中图示的特征不一定是按比例绘制的,并且即使本文中没有明确说明,本领域技术人员也可以将一个实施例的特征与其他实施例一起使用。可以省去对众所周知的部件和处理技术的描述,以免不必要地使本公开内容的实施例不清楚。本文中使用的示例仅旨在促进对可以实践本发明的实施例的方式的理解,并且还使得本领域技术人员能够实践该实施例。因此,本文中的示例不应被解释为限制本公开内容的实施例的范围,本公开内容的实施例的范围仅由权利要求和适用法律来限定。
193.应当理解,本公开内容的实施例不限于本文描述的特定方法、协议、设备、装置、材料、应用等,因为这些都可以变化。还应理解,本文所使用的术语仅用于描述特定实施例的目的,而并不旨在限制所要求保护的实施例的范围。必须注意,除非上下文另外明确指出,否则本文和权利要求书中所使用的单数形式的“一个”、“一种”和“该”包括复数形式。
194.除非另有定义,否则本文中使用的所有科学技术术语的含义与本公开内容的实施例所属的领域的普通技术人员通常所理解的含义相同。尽管描述了优选的方法、设备和材料,但是与本文描述的那些方法和材料相似或等同的任何方法和材料都可以用于实施或测试实施例。
195.如上所述,期望增强向用户的cpr递送而使得cpr更加有效并且提高cpr对患者的益处。还期望最大程度地减小在cpr递送期间对患者和/或用户造成损伤的风险。
196.本发明的实施例提供了cpr设备、控制方法以及计算机程序。cpr设备可以包括可以被改变以调节cpr设备的轮廓的一个或多个可变性质。当在cpr递送期间(特别是在胸部按压的递送期间)使用该cpr设备时,一个或多个可变性质可以响应于刺激而变化并且也可以受到控制。因此,一个或多个可变性质可以改变在cpr递送期间设备与患者和/或用户的相互作用,并且可以增强向患者的cpr递送。也可以通过设备的一个或多个可变性质来最大程度地减小在cpr递送期间对患者和/或用户造成损伤的风险。这可以通过在cpr按压循环期间保持正确且一致的深度和完全的释放(以其他方式可能难以实现)来实现。
197.图1示出了根据本发明的一般实施例的心肺复苏cpr设备的框图。cpr设备1包括用户侧2和患者侧3。患者侧3适合于与患者的胸部接合。用户侧2适合于与向患者递送cpr的用户的手接合。cpr设备1还可以包括控制器(未示出)。用户侧2和患者侧3中的任一者或两者可以被提供有一个或多个可变性质,例如,具有可变粘度的非牛顿流体、具有可变接触特性
的材料或用于改变设备的外部形式的致动器。
198.图2示出了根据本发明的一般实施例的用于心肺复苏cpr设备的控制方法的流程图。在步骤s21处,采集一种或多种数据类型。该数据类型可以包括:被施加到设备的力的力数据;与患者的状况有关的患者传感器数据;与用户的状况有关的用户传感器数据;关于患者的信息;关于用户的信息;设备在多个时间点的加速度的加速度数据;位于患者的胸部上的设备的图像数据;以及被施加到设备的压力的压力传感器数据。在步骤s22处,根据所采集的数据类型中的一种或多种来控制cpr设备的一种或多种可变性质。该可变性质可以是具有可变粘度的非牛顿流体、具有可变接触特性的材料或用于改变设备的外部形式的致动器。
199.nnf可以是剪切增稠流体(stf)。stf是非牛顿流体,其性质会基于剪切力的施加而变化。它们在低水平的力的作用下可以是柔软而舒适的,但在被施加较高水平的力时会变硬并表现得更像实心物体。可以调整stf的配方以调谐流体的性质,包括粘度、临界剪切速率、储能模量以及损耗模量。另外,对stf的更多了解使得可以使用例如电场、磁场或振动来动态改变stf的性质。根据本发明的各方面的实施例,可以将这样的stf并入cpr设备。也就是说,cpr设备的用户侧可以至少部分地由具有可以被调谐和控制的性质的stf形成。备选地或额外地,患者侧可以至少部分地由具有可以被调谐和控制的性质的stf形成。
200.柔性传感器实现了在舒适的表面上进行多种感测(例如,压力感测、光学感测、温度感测以及惯性感测)的能力。因此,根据本发明的各方面的实施例,可以将这样的柔性传感器并入cpr设备,以便采集从患者、用户和/或cpr递送获取的测量结果的传感器数据。传感器数据然后可以用于控制cpr设备的一个或多个可变性质。
201.如上面所讨论的,设备的患者侧和用户侧中的一个或多个可以至少部分地由具有可变接触特性的材料形成。存在各种方法来动态控制材料的粘附和摩擦性质,包括电粘附、超声和新颖的表面设计。因此,根据本发明的各方面的实施例,可以将这样的方法并入cpr设备,以便实现在其表面的至少部分上可以具有可变的接触特性的设备。
202.在cpr递送期间(特别是在cpr递送期间对患者施用胸部按压期间),由于个体间差异,不同患者的胸部区上的最优按压力轮廓会具有显著变化。也就是说,最优按压深度以及因此到达该深度所需的力在不同患者间具有变化。尽管最优按压深度所需的比力因个体而异,但是已经为不同的患者组(例如,成人、儿童、婴儿、老人、男性、女性等)识别了范围。例如,男性和女性所需的力分别在320
±
80n和270
±
70n的范围内。因此,可以根据旨在对其使用设备的患者组以及与该患者组相关联的期望的力来确定根据本发明的各方面的实施例的cpr设备的一个或多个可变性质的范围。
203.计算方法使得能够使用例如超声和超宽带(uwb雷达)来实时分析心肌和邻近脉管系统的活动。也可以使用超声来测量血压。这种对心肌和血流活动的分析可以与根据本发明的各方面的实施例的cpr设备一起用于监测患者的状况,使得可以根据患者的状况来控制cpr设备的一个或多个可变性质。
204.可穿戴雷达可以使用人工智能(ai)来识别细微的身体移动。智能设备中的传感器能够测量心律不齐和血压。可以利用简单的传感器来确定皮肤状况。可以使用例如智能手机相机和面部识别来确定情绪。这种使用消费级可穿戴技术和智能手机技术的身体分析可以与根据本发明的各方面的实施例的cpr设备一起使用,以便监测用户的状况,使得可以根
据用户的状况来控制cpr设备的一个或多个可变性质。
205.可以使用软致动器、电粘附和活性剪切增稠材料来实时改变根据本发明的各方面的实施例的cpr设备的性质中的一种或多种(例如,形状、刚度和粘附)。
206.根据本发明的各方面的实施例,提供了一种具有动态可调性质(包括形状、刚度、摩擦力和粘附力)的cpr设备。可以动态调整这些性质,以针对个体患者和救助者(用户)优化空间和时间力递送轮廓,以便实现所需的cpr质量(例如,血液动力学活动),同时最大程度地减少对患者和/或救助者造成的损伤。可以鉴于救助者传递的按压力来动态调节性质。该优化基于在按压期间在力轮廓变化的情况下对患者和/或救助者的实时分析。
207.根据本发明的各方面的实施例的主要步骤可以总结如下:
208.分析基于当前按压的cpr质量。cpr质量测量结果可以包括对患者的血液动力学活动的分析。
209.分析患者状况,包括cpr设备下的皮肤状况。
210.任选地,分析救助者状况,包括与cpr设备接触的皮肤状况以及救助者的疲劳水平。
211.基于先前的分析来选择一组cpr设备设计参数(例如,形状、刚度和粘附/摩擦性质)以在患者的胸部上创建力轮廓,该力轮廓优化了cpr质量并且最大程度地降低了对患者和/或救助者造成的损伤。
212.因此,本发明的各方面的实施例可以提供以下描述的特征。
213.一种在cpr期间控制患者的血液动力学的系统,其方法是基于对最优力轮廓的评价来调整被施加到胸部的力的设备的力轮廓,以实现个体患者所需的血液动力学活动。可以控制的活动包括:
214.将血液递送到脑部。
215.全身递送治疗。
216.检测、分析和预防/减少内部或外部出血。
217.cpr设备致动器系统用于修改cpr设备的一种或多种性质(包括形状、刚度和粘附/摩擦),并且具有基于力分布输入来创建力分布输出(但不同于力分布输入)(即,根据由用户输入的力得到输出给患者的力)的能力。该系统包括:
218.形状控制,其使用致动器来调整设备的形状。
219.刚度控制,其使用非牛顿流体(例如,剪切增稠材料),该非牛顿流体会响应于由执行cpr的救助者或设备中的激活器施加的力而变硬。
220.粘附和摩擦控制,其使用具有可变粘附性质的材料以促进cpr设备的定位和维持就位。
221.一种经由监测cpr对患者和/或救助者的影响并调整cpr设备的性质(包括形状、刚度和粘附/摩擦)来减少这种影响从而减小对患者和/或救助者造成的损伤的系统。例如,减少摩擦或重复应变。该系统可以通过对在手动cpr按压期间施加的垂直力的时间和空间控制来减少cpr施用期间对患者的损伤。
222.控制单元,其用于计算最优cpr设备参数以将其应用于患者的胸部,从而在给定的力输入的情况下实现期望的血液动力学结果。也就是说,根据由救助者(用户)施加到设备的力来确定设备的目标输出力轮廓。
223.图3示出了根据本发明的一个方面的实施例的cpr系统11的框图。cpr系统11被设计为通过动态调整从救助者(用户)到患者的cpr设备的力传递轮廓而在心脏骤停时向患者施用cpr,使得可以在救助者提供压力的情况下优化诸如血液动力学活动之类的cpr质量。可以通过改变cpr设备中的参数(“设备参数”)来调整力轮廓,包括形状轮廓、刚度轮廓和粘附/摩擦轮廓。
224.cpr系统11可以包括按压控制系统31、粘附/摩擦控制系统32、形状控制系统33、患者监测装置34、cpr监测装置35、救助者(用户)监测装置36、cpr参数设计算法37、轮廓选择算法38以及轮廓数据库39。
225.按压控制系统31提供对在手动cpr按压期间施加的垂直力的时间和空间控制。这可以包括非牛顿流体(例如,剪切增稠(stf)材料),该非牛顿流体覆盖设备并与患者的胸部和救助者的手的形状保持一致。stf的刚度以及设备的刚度会在施加力期间发生变化,以确保将力从救助者有效传递到患者。
226.该设备可以包括多个包含stf的单元,使得可以独立且动态地控制每个单元的刚度,以在与胸部接触的区上提供像素化控制,从而使得能够在每次按压时控制按压力的位置。
227.可以使用包括(超)声、电学或磁性刺激在内的各种刺激来控制流体的刚度,并且该刺激可以取决于stf的性质。例如,被放置在每个stf单元中的超声换能器可以被激活以独立于由救助者施加的力来调制stf的刚度。在没有任何刺激的情况下,由于stf的性质,stf将在救助者施加足够的力时变硬。因此,在施加很少力或者不施加力的情况下,设备仍然能够与患者的胸部和救助者的手一致,此时可以实现从救助者到患者的有效力传递。这可以被视为默认行为。
228.可以应用额外的刺激来调整默认行为。例如,可以使用额外的刺激在按压循环期间的不同时间增加一些单元的刚度并降低其他单元的刚度。一旦达到最优按压深度,这可以例如通过软化设备来避免过度的按压深度。
229.如以上关于不同患者组所描述的那样,可以针对例如在cpr期间存在的力的范围来设计并优化流体的剪切增稠动力学。另外,可以针对不同组(例如,儿童、成人或老人)定制被设计具有特定性质(大小、刚度等)的不同设备。例如,儿科cpr设备会比成人设备小,并且用于像素化控制的单元会成比例地变小。与成人设备中使用的stf相比,stf可以被调谐而使其在较低水平的力下变硬,从而与对儿童进行cpr所需的力一致。最大刚度也可以低于成人设备的刚度,这会在力传递效率与患者舒适度/损伤减少之间产生平衡。
230.粘附控制系统32修改被施加到患者的皮肤和/或用户的皮肤的侧向力。修改侧向力可以控制和减少摩擦效应造成的损伤,并且/或者使用用户有意或在cpr按压期间递送的侧向力来控制定标器在患者的胸部上的位置。粘附控制系统32可以包括具有动态可控的摩擦和粘附性质的材料。
231.在给定患者感测和摩擦调制系统的可用分辨率的情况下,可以以像素化方式主动控制摩擦(或者以其他方式进行侧向力控制)。例如,可以将足以防止定标器滑动的摩擦施加到尚未受损的皮肤区,同时可以减少在受损皮肤区上的摩擦。可以通过结合设备的形状动态调整粘附性质来控制cpr设备的位置,使得在按压循环期间施加力会引起cpr设备以受控方式侧向移动,直到到达所需位置为止。
232.该系统可以包括:用于在给定皮肤/骨骼状况和cpr有效性的情况下确定所需的定标器位置的算法,例如,可以将定标器移动1cm以避免受损的皮肤/骨骼区;基于以下条件来确定应被施加到压在患者的皮肤上的表面上的摩擦/粘附性质的算法:患者的皮肤状况(例如,水分)、年龄、当前的损伤状态等;以及在cpr按压循环期间被施加到定标器的力,可以直接测量该力,也可以使用来自先前按压循环的数据来预测该力;以及所需的定标器位置。
233.形状控制系统33修改cpr设备的形状。这可以包括跨cpr设备的多个致动器,能够独立控制这些致动器来以像素化方式改变设备的厚度。例如,液压放大的自我修复静电(hasel)致动器的阵列可以嵌入设备并且覆盖有柔性表面,该柔性表面可以额外地被填充有stf。一个致动器的电激活会引起相对于相邻致动器的厚度变化,从而引起在致动器之间的表面形成倾斜。通过使用形状控制,能够将被施加到设备的垂直力转换为包括被施加到患者的胸部的力的侧向分量和垂直分量。
234.患者监测装置34确定患者的状况。这包括监测患者的生理参数和患者的皮肤状况。收集来自患者监测装置的数据(“患者数据”)。各种各样的传感器使得能够感测或预测对患者的胸部即将造成的损伤,并且该系统调整跨接触区的力轮廓以降低造成损伤的风险。
235.与cpr相关的患者生理参数包括但不限于:冠状动脉灌注压(cpp);向脑部递送的血液;全身递送的注射的治疗剂;检测到和分析出的内部或外部出血;以及检测到的皮下软组织和骨损伤。
236.这些参数可以通过监测cpr设备内部或外部的装备来测量。监测装备可以包括标准的超声成像或uwb雷达和处理单元,其用于对心肌和相邻脉管系统进行成像和分析以及测量血压。也就是说,计算方法使得能够使用例如超声和uwb雷达来实时分析心肌和邻近脉管系统的活动,并且还可以使用超声来测量血压。另外,可以经由cpr设备上的压力传感器的压力轮廓的改变来检测骨骼损伤(例如,对肋骨的损伤)。如果测量了血液动力学行为,则可以预测在整个循环系统中递送的注射的治疗剂。血液动力学行为和血压的意外变化可以指示出血。能够使用这方面的知识来调整力轮廓,以最大程度地减少预计会出血的血管上的压力。
237.可以使用设备中的或连接到设备的传感器以各种方式监测患者的在cpr设备下的皮肤状况。可以经由电容测量器件来监测皮肤水分;可以经由光学传感器来监测皮肤的油性和发红;并且可以经由振动传感器来监测皮肤的弹性。
238.cpr监测装置35监测cpr活动。使用各种传感器来收集来自cpr监测装置的数据(“cpr数据”)。这些数据可以包括:按压速率,其例如可以通过从加速度计观察加速度随时间的变化来确定,其用于确定执行按压循环所花费的时间;按压深度,其例如可以通过对加速度计数据进行二次积分以确定在按压循环的顶部和底部之间行进的距离来确定;由救助者施加到cpr设备的力的空间和时间轮廓,其例如可以经由设备的救助者(用户)侧的压力传感器来确定;以及cpr设备位置。如果指向患者的相机可用并且可由系统访问,则可以使用图像识别技术来确定设备位置,以确定cpr设备在患者的胸部上的位置。另外,在cpr设备的底侧(患者侧)的压力传感器的阵列可以用于根据压力轮廓来估计设备的位置。例如,传感器上的较高压力读数可以指示诸如太阳神经丛和肋骨之类的骨骼结构,而较低的读数可能指示诸如肋骨与隔膜边缘之间的间隙之类的软组织。
239.救助者(用户)监测装置36任选地监测救助者的状态。收集数据(“救助者数据”),并且该数据可以包括:与cpr设备接触的手的皮肤状况,如上面所讨论的,其能够通过使用设备的救助者侧的传感器以各种方式来监测(水分、油性、发红、弹性等);以及救助者生理参数,其可以用于确定救助者的疲劳水平;以及救助者身份。在cpr期间,救助者可能会改变,这将改变应当使用的最优cpr设备参数。救助者的改变可以由救助者监测装置来识别,例如经由身体几何形状的改变或面部识别(如果可用的话)来识别。
240.救助者生理参数可以包括:心率,其例如通过使用与救助者的手接触的压力或光学传感器来确定;呼吸速率,其可以指示用户的精力或镇静水平;身体的几何形状和位置,特别是手臂的定位;以及救助者情绪状态,如上面所讨论的,其可以根据面向救助者的相机(如果可用的话)和面部识别来确定。如果相机可用(例如,在相邻的除颤器(aed)上,在救护车中或者在病房中),则可以提供关于救助者状态的数据(例如,呼吸速率和面部表情中的不适)。
241.监测救助者状态可能很重要,因为如果救助者的皮肤变得非常破损或者救助者变得过于疲劳,则cpr的质量可能会下降(或者完全停止)。因此,(即使以略微降低的cpr质量为代价而)促进救助者健康的cpr设备设置会在总体上改善患者的预后。促进救助者健康的设备设置的示例包括选择性软化以及改变形状或粘附点,以便改变救助者的手上的压力轮廓或者鼓励不同手臂位置。
242.因此,该系统可以在cpr递送期间提高救助者的舒适度。可以在救助者的手下以像素化方式调整设备救助者侧的材料的刚度,以最大程度地提高舒适度并减小重复性压力相关损伤的风险。与救助者的手接触的cpr设备表面的粘附和摩擦性质能够以像素化方式动态变化,以减少因摩擦引起的损伤。多种传感器使得能够测量救助者的舒适度,并且系统可以调整力轮廓以提高舒适度。
243.cpr参数设计算法37设计测试以评价不同的cpr设备参数集合对cpr质量的影响。cpr设备参数到cpr质量影响的映射是“cpr设备轮廓”。因此,确定了设备参数集合的影响(例如,在施加的力的范围内对患者状况的影响),并且将这些影响链接到设备参数。轮廓选择算法38选择特定的cpr设备轮廓以实现与进行中的cpr相关的特定目标(“目标”)。轮廓数据库39存储cpr设备轮廓。可以根据所确定的影响来存储这些cpr设备轮廓。
244.因此,控制器可以设置设备的一个或多个可变性质,然后监测性质设置对患者和/或用户的影响。控制器可以将性质设置与产生的影响一起存储在数据库中。控制器还可以监测患者、用户和/或cpr递送的状况并确定cpr目标。然后,控制器可以将cpr目标与在数据库中存储的多个设备性质设置的影响进行比较。控制器可以设置设备的性质设置以匹配在数据库中存储的可以实现与cpr目标相同或相似的影响的设置。
245.因此,可以通过控制材料性质来减少因cpr递送造成的患者损伤,该材料性质基于对患者组织/骨骼状况和其他cpr关注问题的测量结果来改变cpr按压力传递动力学。因此,可以通过调整力施加的空间和时间动力学来控制或防止损伤。可以考虑控制设备的侧向(剪切)力和垂直力。
246.该系统可以提高cpr按压的质量。可以通过在cpr按压循环期间动态修改在患者胸部上的施加区上的力来控制按压深度,其方法是降低材料的刚度以在达到最优按压深度时减小对胸部的作用力,由此最大程度地减小过度按压的风险。通过调整在患者侧和救助者
侧上的由设备覆盖的区上的力的分布而将力的递送引导到最优位置,可以提高按压质量。一旦压力降低,就可以通过stf材料的自然软化来促进按压循环的上冲程期间的压力释放。各种传感器可以使得能够测量cpr质量,并且该系统可以调整力轮廓以提高质量。
247.图4示出了根据本发明的一个方面的实施例的用于cpr系统的控制方法的流程图。在步骤s41处,利用设备参数的初始集合来配置cpr设备。在步骤s42处,当对患者执行cpr时,cpr设备收集数据,并且在步骤s43处,cpr参数设计算法使用不同的cpr设备参数集合来运行测试以确定其对cpr质量的影响。在步骤s44处,轮廓选择算法使用不同的cpr设备参数集合来运行测试以确定其对cpr质量的影响,并且在步骤s45处,利用所选择的设备参数来配置cpr设备。
248.设备参数配置:按压控制系统;粘附控制系统;以及形状控制系统。在执行cpr时,cpr设备收集数据。数据收集自:患者监测装置;cpr监测装置;以及救助者监测装置。
249.cpr参数设计算法使用不同的cpr设备参数集合来运行测试以确定其对cpr质量的影响,并且填充轮廓数据库。该算法将患者数据、cpr数据并且任选地还将救助者数据作为输入并且输出cpr设备参数集合以及关于在这些参数下如何影响cpr的总体质量的相关联的数据。这些轮廓被存储在轮廓数据库中。该过程可以被视为“设计流程”。
250.描述了该算法的示例实施方式。当启动设计流程时,利用cpr设备参数的初始集合来配置cpr设备。这可以例如是cpr设备的默认状态,其中,未启用任何活跃控制。设备参数可以随时间变化,使得其在按压循环的过程期间发生变化。这例如使得能够以变化的角度和位置将力施加在胸部上,从而作用在心脏上。
251.当执行按压循环时,该算法会在这些参数设置下接收患者数据、cpr数据和救助者数据,并且为这些数据集合中的每个数据集合提供得分(“轮廓得分”)。
252.这些得分的示例计算包括以下内容:
253.基于与预定理想值(例如,由先前的cpr研究确定的值)相比较的条件的血液动力学得分,例如。以理想值的百分比实现的cpp或以理想值的百分比实现的向脑部递送的血液。
254.cpr速率得分:1-|当前cpr速率-最优cpr速率|/最优cpr速率
255.cpr深度得分:1-|当前cpr深度-最优cpr深度|/最优cpr深度
256.患者皮肤影响得分:对于设备的每个可控像素,基于摩擦/粘附性质以及所施加的力的幅值和方向来估计对该像素下的患者皮肤的可能影响。这可以基于从先前的cpr时段收集的数据被实施为查找表。
257.救助者皮肤影响得分:对于设备的每个可控像素,基于摩擦/粘附性质以及所施加的力的幅值和方向来估计对该像素下的救助者皮肤的可能影响。这可以基于从先前的cpr时段收集的数据被实施为查找表。
258.这些得分与当前活跃的cpr设备参数集合一起存储在cpr设备轮廓数据库中。经过多个按压循环之后,调整cpr设备参数并且重复前面的两个步骤。例如,参数调整之间的按压循环数可以是固定的,也可以基于得分看起来稳定时的时间。
259.可以预先确定调整以循环通过代表性的形状、按压和粘附/摩擦设置的范围,或者可以基于对可能改善cpr性能的操作的预测来动态确定调整。例如,如果观察到对患者心脏的左心室(lv)的按压不充分,则选择预计会增加对左心室的按压的cpr设备的位置、形状和
按压特性的变化。这种预测可以根据先前运行的测试来导出,或者根据先前的cpr研究导出的规则集合来导出。例如,如果当前没有在lv的正上方施加最大力,则可以改变设备的形状/位置,使得最大力在lv的正上方。改变参数还可以引起cpr设备位置的改变。设备位置数据被存储为cpr设备轮廓的部分。
260.一旦测试了许多cpr设备参数集合,设计流程便结束。可以预先确定许多集合以提供代表性的形状、按压和粘附/摩擦设置的范围,或者可以在达到特定的得分集合时或者在固定的时间量之后结束设计流程。
261.可能触发设计流程运行或重新运行的条件包括:
262.当开始cpr时,这可以根据cpr数据来确定;
263.当救助者改变时,这可以根据救助者数据来确定,以及在与新的救助者有关的数据在轮廓数据库中尚不可用的情况下;
264.在cpr设备已经移动并且在新的位置处没有轮廓数据可用的情况下;在给定的cpr设备参数集合下测得的患者数据、cpr数据和救助者数据与根据轮廓数据所预计的结果有显著偏离的情况下——这可以表明某种潜在变化,例如,患者胸部随时间的松弛、肋骨骨折或新的出血;以及
265.在预定义时间量之后。
266.轮廓选择算法选择cpr设备参数集合以实现定义的目标。该算法将cpr轮廓数据、患者数据、cpr数据和救助者数据作为输入并且输出用于配置cpr设备的选定的cpr设备参数集合。目标可以包括:
267.首先最大程度地提高脑血流量或cpp;
268.实现足够的脑血流量或cpp,同时最大程度地减小对患者和救助者造成的损伤;实现全身递送注射的治疗剂;以及
269.在考虑检测到的出血的情况下实现最优的血液动力学。
270.可以在cpr开始时预先确定和选择目标选择,也可以在cpr期间改变目标选择。选择主要目标,并且任选地选择次级目标,如果实现了主要目标,则次级目标将变为活跃状态。目标选择示例可以包括:如果患者处于具有多个可用救助者的受控环境(例如,医院)中,则可以选择目标(i);如果患者在医院外,只有一名救助者可用,并且额外帮助的到达时间尚不知道,则目标(ii)可以是优选的,以最大程度地提高救助者继续进行cpr的机会;并且如果将治疗剂注射到患者体内,则目标(iii)可以暂时是优选的。
271.提供该算法的示例实施方式。首先,评价可用的数据以确定:血流动力学得分;患者皮肤状况;任选地,救助者皮肤状况;以及任选地,救助者疲劳状态。基于选定的目标和上面计算的得分,然后选择预计最能实现目标的轮廓。如果目标中包括皮肤损伤,则能够根据当前测量的皮肤状况和该轮廓对皮肤的影响得分来预测轮廓对皮肤的影响。这可以基于先前的cpr时期的观察结果被实施为查找表。最后,定期对数据进行重新评价,并且根据需要来改变轮廓选择。
272.利用选定的设备参数来配置cpr设备。
273.图5示出了根据本发明的实施例的cpr设备的示意图。cpr设备1包括:具有可调摩擦/粘附性质的表面51;形状改变的致动器的阵列52;可调剪切增稠材料53;电源和控制系统54;声波致动器55;以及传感器56。
274.形状改变的致动器的阵列53允许对设备1的形状进行像素化控制,并且例如可以是hasel。传感器56可以是例如压力传感器、光学传感器、电容传感器、加速度传感器等。声波致动器55可以是超声致动器,并且可以被操作为向可调谐剪切增稠材料53施加振荡或机械刺激以改变其粘度。
275.图6示出了根据本发明的实施例的在由用户向患者递送cpr期间使用的cpr设备的示意图。该图示出了用户的手6将胸部按压施加到患者的胸部7,其中,设备1被设置在用户的手6与患者7之间。该设备位于患者的心脏71上方的患者7的胸部上。将按压力81输入到设备1,并且设备向患者7输出力输出82。
276.可以调整cpr设备1的性质,使得cpr设备1与患者的胸部7和用户的手6相一致。如在点91处所示,调整设备1的形状和其他性质。例如,在点92处的粘附促进以一定角度传递力。
277.图7示出了根据本发明的实施例的在由用户向患者递送cpr期间使用的cpr设备的示意图。与图6相比,能够看出,已经调整了设备1的性质,使得设备1的形状和位置不同。测量响应于不同的定标器性质的血液动力学差异,并且可以相应地改变设备(定标器)1的性质。
278.从上面可以看出,本发明的实施例可以提供cpr设备、控制方法和计算机程序。cpr设备可以包括可以被改变以便调节cpr设备的轮廓的一个或多个可变性质。cpr设备可以被提供为cpr系统的部分。本发明的实施例可以克服上面讨论的现有技术的缺点。
279.针对救助者的给定的cpr性能,可以优化诸如患者内的血液动力学活动之类的cpr质量。这可以通过以下操作来实现:通过使用使得能够动态调整这些性质的材料和致动器来调整cpr设备的性质(包括形状、刚度和粘附/摩擦)。这可以与监测cpr对患者的有效性的技术相结合,从而使得能够选择设备性质以获得最优结果。
280.本发明的各方面的实施例可以通过调节cpr设备的一种或多种性质来调整被施加到患者的胸部的力轮廓,从而针对给定的救助者cpr性能提供心脏骤停患者的优化的血液动力学活动。
281.本发明的各方面的实施例可以通过对由cpr设备施加到患者的胸部的垂直和侧向力的空间和时间调整来最大程度地减小摩擦皮肤损伤和对(例如由于过度按压所致的)皮下软组织和骨骼的压力相关损伤,从而减小因cpr引起的患者损伤。
282.本发明的各方面的实施例可以通过对从cpr设备施加在救助者的手上的垂直力和侧向力的空间和时间调整来最大程度地减小摩擦皮肤损伤、与压力有关的损伤和重复性应变相关损伤,从而减小对救助者造成的损伤并提高救助者的舒适度。
283.尽管上面仅详细描述了几个示例性实施例,但是本领域技术人员将容易地意识到,在实质上不脱离本公开内容的实施例的新颖性教导和优点的情况下,可以对示例性实施例做出许多修改。本发明的上述实施例可以有利地独立于任何其他实施例来使用,或者以与任何一个或多个其他实施例的可行组合来使用。
284.因此,所有这样的修改旨在被包括在如权利要求所限定的本公开内容的实施例的范围内。在权利要求中,模块加功能的条款旨在覆盖本文中描述的执行所记载的功能的结构,不仅覆盖结构上的等同物,而且还覆盖等同的结构。
285.另外,在一个或多个权利要求中的括号中放置的任何附图标记不应被解释为对权
利要求的限制。词语“包括”和“包含”等并不排除任何权利要求或整个说明书中列出的元件或步骤之外的元件或步骤的存在。元件的单数引用并不排除这样的元件的复数引用,反之亦然。可以借助于包括若干不同元件的硬件来实现一个或多个实施例。在列举了若干模块的设备或装置权利要求中,这些模块中的若干模块可以由同一个硬件来体现。在互不相同的从属权利要求中记载某些措施的事实并不表示不能有利地使用这些措施的组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。