1.本发明涉及三维空间光谱成像技术领域,具体地,涉及一种基于编码孔径和光场分布的三维空间光谱成像方法及装置技术领域。
背景技术:
2.光场是空间中同时包含位置和角度信息的四维光辐射场的参数化表示,光场数据的获取为计算成像提供了很多新的发展方向,也为数字成像领域带来了显著的进步。光场成像通过记录光辐射在传播过程中的四维位置和方向的信息,相比只记录二维的传统成像方式多出2个自由度,因而在图像重建过程中,能够获得更加丰富的图像信息。全光函数的多维光参量信息可以表征光波场传播的空间、光谱、偏振、时间等多维信息,可用l(x,y,z,θ,φ,ψ,χ,λ,t)表示,包括三维空间分布(x,y,z)、光线传播方向角(θ,φ)、光波长λ、光波偏振角(ψ,χ)、传输时间t。快照式光谱三维成像技术能够在一次曝光时间内,同时获取目标景物的三维空间信息(x,y,z)和一维光谱信息(λ),可以用于目标的识别、测量和空间方位探测。为了获取目标景物的四维空间图谱信息,需要将光波场调制成像在二维探测器上。目前,快照式光谱三维成像技术主要有基于飞行时间原理(time of flight,tof)、基于双目视觉原理和基于光场成像原理的技术。
3.基于飞行时间原理(tof)的技术是利用光脉冲发射器和接收器,计算光脉冲发射后,经目标物体反射,由接收器探测过程的传播时间差,利用时间差和光速的乘积计算目标物体与成像系统之间的空间距离,从而合成目标物体的三维空间分布信息。该技术利用tof与编码孔径快照式光谱成像技术结合形成双通道系统,在探测合成目标三维空间分布的同时,利用压缩感知重构算法,恢复并获取目标各个空间位置处的光谱信息,最终合成目标景物的光谱三维空间分布信息。
4.基于双目视觉原理的技术是利用双通道进行成像,再结合双通道成像视差,重构目标景物的三维空间分布信息。一般情况下,该技术其中一个通道采用全色相机或rgb彩色相机进行成像,另一个通道可采用基于滤光片的光谱成像系统或编码孔径光谱成像系统等。这样,在获取目标三维空间分布信息的同时,可以通过融合算法,合成目标景物光谱分布信息。
5.基于光场成像原理的技术是利用微透镜阵列分解光线的角度信息,从而探测器能够同时记录各条光线强度信息和方向信息。利用数字对焦技术重建目标景物不同景深的图像,通过重构算法合成目标的三维空间分布信息。在此基础上,采用滤光片阵列编码孔径,获取目标景物的图谱混叠光场分布数据,利用压缩感知重构算法,恢复目标各个空间位置的光谱信息,最终获取目标景物的光谱三维空间分布信息。
6.上述快照式光谱三维成像技术均存在较为显著的缺点:
7.基于tof技术和基于双目视觉原理的光谱三维成像技术均需要两个成像通道,因此系统结构较为复杂,可靠性差;在成像过程中,双通道相机对快门时间控制精度要求较
高,快门时间不一致会导致两个通道成像数据存在偏差,引起数据重构精度降低,系统鲁棒性较差。尤其对于快速变化的动态目标,双通道相机探测数据之间存在较大偏差,进一步降低了数据合成重构的精度。
8.基于光场成像原理的光谱三维成像技术采用单通道探测,克服了双通道快门时间偏差可能引起的数据重构降质。引入滤光片编码孔径,获取图谱混叠数据,并依据压缩感知重构算法恢复目标景物图谱信息,系统集成度高、鲁棒性较好。但由于滤光片对不同光谱的吸收,导致系统综合光通率降低,从而造成信噪比大幅下降。
技术实现要素:
9.针对现有技术中的上述缺陷,本发明提供了一种基于编码孔径和光场分布原理的三维空间光谱成像方法,系统采用单通道成像,通过孔径编码、棱镜分光色散和光场成像技术相结合,单次曝光成像即可获得目标景物的编码图谱混叠光场图像,再通过压缩感知重构算法和光场三维重构方法,恢复重建目标的三维空间分布信息和一维光谱信息,具有系统结构简单、鲁棒性高、光通量高、重构数据信噪比高等优点。
10.本发明的目的是通过以下技术方案实现的:
11.本发明提供一种基于编码孔径和光场分布原理的三维空间光谱成像方法,一种基于编码孔径和光场分布的三维空间光谱成像方法,其特征在于,包括如下步骤:
12.s1:图像数据采集
13.s1.1:对目标光波场辐射信息进行空间编码以实现强度调制,获得调制后的目标光波场辐射信息;
14.s1.2:对调制后的目标光波场进行汇聚成像,得到目标一次像光波场;
15.s1.3:对所述目标一次像光波场进行准直,形成准直之后的光波场;
16.s1.4:对所述准直之后的光波场进行分光色散,形成分光色散后的目标光波场;
17.s1.5:对所述分光色散后的目标光波场进行光场成像,形成目标图谱混叠光场图像;
18.s2:三维空间图谱数据重构
19.s2.1:对上述步骤s1.5中所述目标图谱混叠光场图像数据进行预处理;
20.s2.2:依据压缩感知重构方法,对所述预处理后的目标图谱混叠光场图像进行重构,得到单谱段光场图像序列;
21.s2.3:依据光场三维重构方法,对所述单谱段光场图像序列进行重建恢复,得到单谱段三维空间图像序列;
22.s2.4:根据所述单谱段三维空间图像序列生成目标景物的三维空间光谱图像信息。
23.优选地,在上述步骤s2.1中,所述预处理包括:平场校正、去除坏像元等。
24.优选地,在上述步骤s2.2中,所述压缩感知重构方法包括:两步迭代收缩算法、正交匹配算法等。
25.根据本发明的另一方面,本发明还提出了一种光学结构紧凑、集成度高的三维空间光谱成像装置,以实现上述三维空间光谱成像方法,能够在一次曝光成像过程中,同时获取目标的三维空间信息和一维光谱信息。
26.一种基于编码孔径和光场分布的三维空间光谱成像装置,其特征在于,包括前置光学成像模块、准直模块、分光色散模块、光场成像模块、图像处理模块;其中,
27.所述前置光学成像模块,用于对目标光波场辐射信息先进行空间编码以实现强度调制,获得调制后的目标光波场辐射信息,再对所述调制后的目标光波场进行汇聚成像,得到目标一次像光波场;
28.所述准直模块,设置于所述前置光学成像模块后,并且与所述前置成像模块共轴,对所述目标一次像光波场进行准直;
29.所述分光色散模块,设置于所述准直模块后焦面处,中心与所述准直模块共轴,用于对所述准直后的光波场进行分光色散,形成分光色散后的目标光波场;
30.所述光场成像模块,设置于所述分光色散模块后,用于对所述分光色散后的目标光波场进行光场成像,形成目标图谱混叠光场图像,和采集所述目标图谱混叠光场图像信息并发送到所述图像处理模块进行三维空间图谱数据重构;
31.所述图像处理模块,设置于所述光场成像模块后,用于存储和处理所述光场成像模块发送的所述目标图谱混叠光场图像信息,其中,数据处理采用压缩感知重建方法和光场三维重构方法相结合,将所述图谱混叠光场图像重构恢复为单谱段三维空间图像序列,进而生成目标景物的三维空间光谱图像信息。
32.优选地,所述前置光学成像模块包括空间编码模板、孔径光阑和前置成像镜头,其中,所述孔径光阑设置于所述前置成像镜头的前焦面处,所述空间编码模板设置于所述孔径光阑处;所述前置成像镜头成像在一次像面处,对调制后的目标光波场进行汇聚成像得到目标一次像光波场。
33.优选地,所述前置成像镜头为像方远心镜头。
34.优选地,空间编码采用二值化编码形式。
35.优选地,所述准直模块为准直镜。
36.优选地,所述分光色散模块为分光棱镜。
37.优选地,所述光场成像模块包括成像镜、微透镜阵列和探测器,其中,所述成像镜设置于所述分光色散模块后,与所述准直模块共轴;所述微透镜阵列置于所述成像镜后,且位于所述成像镜的像面处;所述探测器设置于所述微透镜阵列后,并与所述微透镜阵列的后焦面重合,所述探测器采集得到所述目标图谱混叠光场图像信息并发送到所述图像处理模块中进行存储和处理。
38.优选地,所述的图像处理模块为计算机。
39.与现有技术相比,本发明的优点在于:
40.1、本发明采用基于编码孔径原理和光场分布原理相结合的方法,并采用压缩感知重构算法和光场三维重构算法,实现对目标三维空间信息和一维光谱信息的同时获取。成像探测过程无需扫描或凝视过程,可用于对快速变化或移动目标进行探测、监视和追踪,可以实现目标景物的三维空间光谱图像的视频获取;
41.2、本发明采用单通道成像的方式,系统光路结构简单、紧凑;无扫描运动部件,便于实现仪器系统的轻量化和小型化,对承载平台稳定性要求较低,具有较高的可靠性;
42.3、本发明的编码模板采用二值化编码和棱镜分光色散,理论上的全色光通率为50%,相比于采用滤光片编码的形式,提高了系统的全色光通量,进而有效提升了探测数据
的信噪比。
附图说明
43.通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显:
44.图1为本发明基于编码孔径和光场分布的三维空间光谱成像方法流程图;
45.图2为本发明基于编码孔径和光场分布的三维空间光谱成像装置结构框图;
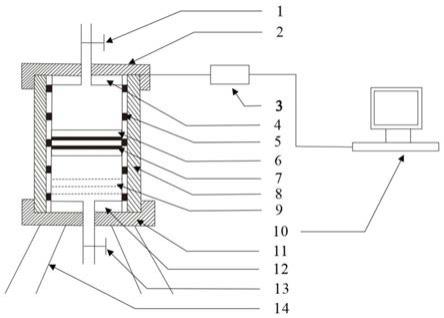
46.图3为本发明基于编码孔径和光场分布的三维空间光谱成像装置具体结构示意图。
47.图中:
[0048]1‑
前置光学成像模块,2
‑
准直模块,3
‑
分光色散模块,4
‑
光场成像模块,5
‑
图像处理模块
[0049]
101
‑
空间编码模板,102
‑
前置成像镜头,201
‑
准直镜,301
‑
分光棱镜,401
‑
成像镜,402
‑
微透镜阵列,403
‑
探测器
具体实施方式
[0050]
下面结合具体实施例对本发明进行详细说明。以下实施例将有助于本领域的技术人员进一步理解本发明,但不以任何形式限制本发明。应当指出的是,对本领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干变化和改进。这些都属于本发明的保护范围。
[0051]
本发明实施例提供了一种基于编码孔径和光场分布原理的三维空间光谱成像方法,系统采用单通道成像,单次曝光成像即可获得目标景物的编码图谱混叠光场图像,再通过压缩感知重构算法和光场三维重构方法(例如包括数字对焦算法等),恢复重建目标的三维空间分布信息和一维光谱信息。
[0052]
下面结合附图对本发明的实施例作详细说明:
[0053]
具体地,请参阅图1,图1为本发明基于编码孔径和光场分布的三维空间光谱成像方法流程图,一种基于编码孔径和光场分布的三维空间光谱成像方法,其特征在于,包括如下步骤:
[0054]
s1:图像数据采集
[0055]
s1.1:对目标光波场辐射信息进行空间编码以实现强度调制,获得调制后的目标光波场辐射信息;
[0056]
s1.2:对调制后的目标光波场进行汇聚成像,得到目标一次像光波场;
[0057]
s1.3:对所述目标一次像光波场进行准直,形成准直之后的光波场;
[0058]
s1.4:对所述准直之后的光波场进行分光色散,形成分光色散后的目标光波场;
[0059]
s1.5:对所述分光色散后的目标光波场进行光场成像,形成目标图谱混叠光场图像;其中,在光场成像过程中,系统采用单通道成像,单次曝光成像即可获得目标景物的编码图谱混叠光场图像。
[0060]
s2:三维空间图谱数据重构
[0061]
s2.1:对上述步骤s1.5中所述目标图谱混叠光场图像数据进行预处理;
[0062]
s2.2:依据压缩感知重构方法,对所述预处理后的目标图谱混叠光场图像进行重构,得到单谱段光场图像序列;
[0063]
s2.3:依据光场三维重构方法,对所述单谱段光场图像序列进行重建恢复,得到单谱段三维空间图像序列;
[0064]
s2.4:根据所述单谱段三维空间图像序列生成目标景物的三维空间光谱图像信息。
[0065]
在本实施例中,优选的,光场三维重构方法具体可以采用数字对焦重构方法,可以快速三维重建、有效降低复杂度。
[0066]
优选地,在上述步骤s2.1中,所述预处理包括:平场校正、去除坏像元等。
[0067]
优选地,在上述步骤s2.2中,所述压缩感知重构方法包括:两步迭代收缩算法、正交匹配算法等。
[0068]
根据本发明的另一方面,本发明实施例还提出了一种光学结构紧凑、集成度高的三维空间光谱成像装置,以实现上述三维空间光谱成像方法,能够在一次曝光成像过程中,同时获取目标的三维空间信息和一维光谱信息。
[0069]
具体地,请参阅图2和图3,一种基于编码孔径和光场分布的三维空间光谱成像装置,其特征在于,包括前置光学成像模块1、准直模块2、分光色散模块3、光场成像模块4、图像处理模块5;其中,
[0070]
所述前置光学成像模块1,用于对目标光波场辐射信息先进行空间编码以实现强度调制,获得调制后的目标光波场辐射信息,再对所述调制后的目标光波场进行汇聚成像,得到目标一次像光波场;
[0071]
所述准直模块2,设置于所述前置光学成像模块1后,并且与所述前置成像模块1共轴,对所述目标一次像光波场进行准直;
[0072]
所述分光色散模块3,设置于所述准直模块2后焦面处,中心与所述准直模块2共轴,用于对所述准直后的光波场进行分光色散,形成分光色散后的目标光波场;
[0073]
所述光场成像模块4,设置于所述分光色散模块3后,用于对所述分光色散后的目标光波场进行光场成像,形成目标图谱混叠光场图像,和采集所述目标图谱混叠光场图像信息并发送到所述图像处理模块5进行三维空间图谱数据重构;
[0074]
所述图像处理模块5,设置于所述光场成像模块4后,用于存储和处理所述光场成像模块4发送的所述图谱混叠光场图像信息,其中,数据处理采用压缩感知重建方法和光场三维重构方法相结合,将所述图谱混叠光场图像重构恢复为单谱段三维空间图像序列,进而生成目标景物的三维空间光谱图像信息。
[0075]
其中,在光场成像过程中,系统采用单通道成像,单次曝光成像即可获得目标景物的编码图谱混叠光场图像,系统光路结构简单、紧凑。
[0076]
在本发明的实施例中,所述前置光学成像模块1包括空间编码模板101、孔径光阑和前置前置成像镜头102,其中,所述孔径光阑设置于所述前置成像镜头102的前焦面处,所述空间编码模板101设置于所述孔径光阑处;所述前置成像镜头102成像在一次像面处,对调制后的目标光波场进行汇聚成像得到目标一次像光波场。
[0077]
优选地,所述前置成像镜头102为像方远心镜头。
[0078]
优选地,空间编码采用二值化编码形式,其中,编码参数由仪器系统设计的空间视
场范围、空间分辨率等性能指标决定。由于本发明采用了二值化编码和棱镜分光色散相结合的方式对目标光波场辐射信息进行强度调制和分光色散,相比于采用滤光片编码的形式,提高了系统的全色光通量,进而有效提升了探测数据的信噪比。
[0079]
优选地,所述准直模块2为准直镜201。
[0080]
优选地,所述分光色散模块3为分光棱镜301。
[0081]
由此,目标光波场辐射信息先由空间编码模板101进行强度调制,再由前置成像镜头102成像在一次像面处,并通过准直镜201对目标一次像光波场辐射进行准直,准直后的光波场由分光棱镜301进行分光色散,形成分光色散后的目标光波场。
[0082]
在本发明的实施例中,所述光场成像模块4包括成像镜401、微透镜阵列402和探测器403,其中,所述成像镜401设置于所述分光色散模块3后,与所述准直模块2共轴;所述微透镜阵列402置于所述成像镜401后,且位于所述成像镜401的像面处;所述探测器403设置于所述微透镜阵列402后,并与所述微透镜阵列402的后焦面重合,所述探测器403采集得到所述目标图谱混叠光场图像信息并发送到所述图像处理模块5中进行存储和处理。
[0083]
优选地,所述的图像处理模块5为计算机,用于存储和处理探测器采集的所述图谱混叠光场图像信息,数据处理采用压缩感知重建方法和光场三维重构方法相结合,将图谱混叠光场图像重构恢复为单谱段三维空间图像序列,得到目标景物的三维空间光谱图像信息,从而实现对目标三维空间信息和一维光谱信息的同时获取,成像探测过程无需扫描或凝视过程,可用于对快速变化或移动目标进行探测、监视和追踪,可以实现目标景物的三维空间光谱图像的视频获取;另外,由于采用单通道成像的方式,系统光路结构简单、紧凑;无扫描运动部件,便于实现仪器系统的轻量化和小型化,对承载平台稳定性要求较低,具有较高的可靠性。
[0084]
以上对本发明的具体实施例进行了描述。需要理解的是,本发明并不局限于上述特定实施方式,本领域技术人员可以在权利要求的范围内做出各种变化或修改,这并不影响本发明的实质内容。在不冲突的情况下,本技术的实施例和实施例中的特征可以任意相互组合。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。