1.本发明属于无人驾驶汽车环境感知技术领域,具体涉及一种考虑多因素的行人过街行为预测方法。
背景技术:
2.车辆对于环境数据的获取与信息处理是实现无人驾驶汽车自主行驶的关键技术之一。其中,获得车辆环境信息的方法有很多种,但目前的方法多基于实时检测,或只是做出了简单的行为预测,对于无人驾驶的辅助性有限,为了更好的保证无人车辆的可靠性,往往需要对行人的下一步行为进行一定程度的预测,那么如何在传感器获得了行人数据信息的情况下,更好的预测行人的下一步行为,是实现自动驾驶车辆的必备环节。考虑多因素的行人过街行为预测算法,即根据行人在行走过程中对周围环境的判断,并考虑一定的心理因素,再使用演化博弈论来进行人车模型的修正,实现行人的运动轨迹以及运动速度的预测。
3.目前,国内外许多研究者针对无人驾驶汽车周围行人的环境感知,大都使用深度学习的方法通过大数据对于行人的运动方向、运动姿态等进行分析,以此来进行行人下一步行为的预测。这样的方法可以在多种数据的基础上,实现预知行人目的地的目的。然而由于数据驱动的模型对于新情况预测的准确性不佳,所以也有研究人员使用基于模型的预测方法。根据行人的不同心理、行为,对模型进行改进,可以更好的进行行人的行为预测。
4.社会力模型的关键在于对于不同场景下行人受到的影响因素的选择。在室内,行人更加密集,行人更多的受到其他行人的影响,而在室外环境下,行人更多的受到障碍物以及交通标志的影响,也会受到车辆等交通要素的影响。因此,很多国内外学者基于社会力模型提出了很多改进算法以更好的完成对于行人行为的预测。
技术实现要素:
5.本发明所要解决的技术问题是:提供一种考虑多因素的行人过街行为预测方法,考虑到行人在过街过程中受到的多个因素的影响,提高对行人过街行为的预测准确率。
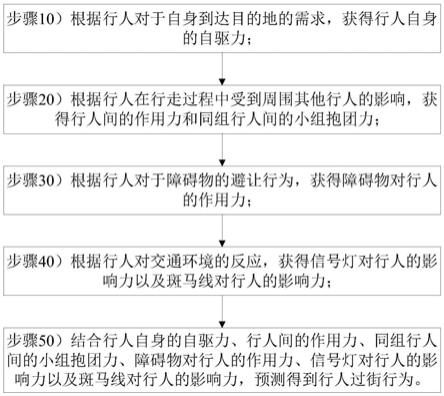
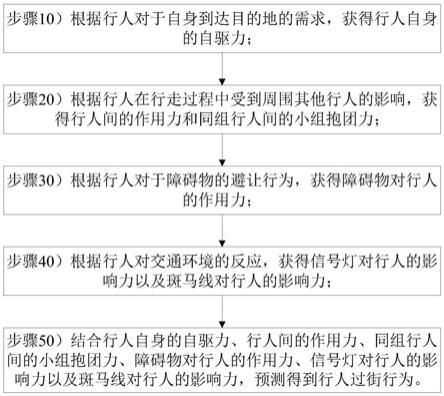
6.为解决上述技术问题,本发明提供一种考虑多因素的行人过街行为预测方法,包括以下步骤:
7.步骤10)根据行人对于自身到达目的地的需求,获得行人自身的自驱力;
8.步骤20)根据行人在行走过程中受到周围其他行人的影响,获得行人间的作用力和同组行人间的小组抱团力;
9.步骤30)根据行人对于障碍物的避让行为,获得障碍物对行人的作用力;
10.步骤40)根据行人对交通环境的反应,获得信号灯对行人的影响力以及斑马线对行人的影响力;
11.步骤50)结合行人自身的自驱力、行人间的作用力、同组行人间的小组抱团力、障碍物对行人的作用力、信号灯对行人的影响力以及斑马线对行人的影响力,预测得到行人
过街行为。
12.作为本发明实施例的进一步改进,所述步骤10)中,利用式(1)得到行人自身的自驱力:
[0013][0014]
式中,表示行人α自身的自驱力,τ表示行人自身的反应时间,表示行人α期望达到的最大速度,表示行人α当前位置指向目标位置的单位向量,表示行人α的当前速度。
[0015]
作为本发明实施例的进一步改进,还包括:
[0016]
步骤601)在遇到车辆时,根据行人与车辆在通过路口时的收益与损失,基于演化博弈论计算行人通过马路的博弈因子;
[0017]
步骤602)通过行人通过马路的博弈因子修正行人期望达到的最大速度。
[0018]
作为本发明实施例的进一步改进,所述步骤601)具体包括:
[0019]
使用龙格库塔法求解式(2),得到行人通过马路的博弈因子:
[0020][0021][0022]
式中,x表示行人通过的概率,y表示车辆通过的概率,r表示行人与车辆发生冲突时行人的冲突损失,s表示行人与车辆发生冲突时车辆的冲突损失,m表示行人在等待车辆通过时的等待损失,n表示车辆在等待行人通过时的等待损失,j表示车辆与行人均未通过时行人的互让损失,k表示车辆与行人均未通过时车辆的互让损失。
[0023]
作为本发明实施例的进一步改进,所述步骤20)中,利用式(3)得到行人间作用力:
[0024][0025]
式中,表示行人β对于行人α的作用力,表示行人β对于行人α的作用力,表示作用的强度,表示作用力的范围,r
αβ
表示行人α与β的半径之和,表示由行人β指向行人α的方向向量:d
αβ
表示行人α与β之间的距离,k表示第一常数,k表示第二常数,f
αβ
表示个体的各向异性:表示个体的各向异性:λ
α
表示行人α的运动的各项异性,0≤λ
α
≤1,表示行人α和行人β运动方向夹角,表示行人α的当前位置指向目标位置的单位向量;
[0026]
利用式(4)得到同组行人间的小组抱团力:
[0027][0028]
式中,表示行人α受到的同组行人间的小组抱团力,a
α_group
表示作用力的强度,b
α_group
表示作用力随距离变化的系数,表示行人α到小组中心点的矢量:表示行人α到小组中心点的矢量:表示该组行人的中心位置:表示该组行人的中心位置:表示组内每个人个体的位置向量,d
α
表示行人α与该组中心位置的距离。
[0029]
作为本发明实施例的进一步改进,所述步骤30)中,利用式(5)得到障碍物对行人的作用力:
[0030][0031]
式中,表示障碍物b对行人α作用力,a
αb
表示作用力强度,b
αb
表示作用力范围,表示由b指向α的方向向量,r
α
表示行人α的半径,d
αb
表示行人α与障碍物b之间的距离。
[0032]
作为本发明实施例的进一步改进,所述步骤40)中,利用式(6)得到信号灯对于行人的影响力:
[0033][0034]
式中,表示信号灯对行人α的作用力,a
l
表示作用力强度,p
α
表示行人α当前位置,p
end
表示目标位置,b
l
表示作用力范围,t
limit
表示绿灯剩余时间,表示从行人α当前位置指向目标位置的方向向量;
[0035]
利用式(7
‑
1)或式(7
‑
2)得到斑马线对行人的影响力:
[0036]
若行人在斑马线外时,
[0037][0038]
式中,表示斑马线n对行人α的吸引力,a
n
表示吸引力强度,b
n
表示距离系数,δx
nα
表示行人α距离斑马线n距离,表示由行人α垂直指向斑马线n的方向向量。
[0039]
若行人在斑马线内时,
[0040]
当时,时,
[0041]
式中,v
α
表示行人当前速度,表示斑马线n对行人α的约束力,a
in
表示吸引力强度,b
in
表示距离系数,δx
′
nα
表示行人α距离斑马线n中线距离,表示由行人α垂直指向斑马线n中线的方向向量。
[0042]
作为本发明实施例的进一步改进,所述步骤50)具体包括:
[0043]
利用式(8)预测得到行人的前进轨迹和速度:
[0044][0045]
式中,表示行人α所受合力,表示行人α自身的合力,表示行人α所受其他行人的合力,包括行人间作用力合同组行人间的小组抱团力,表示行人α所受环境施加的合力,包括障碍物对行人的作用力、信号灯对行人的作用力和斑马线对行人α的作用力。
[0046]
与现有技术相比,本发明的技术方案具有以下有益效果:本发明实施例提供的考虑多因素的行人过街行为预测方法,考虑到行人在过街过程中对于自身达到目的地的需求、受到周围其他行人的影响、对于障碍物的避让以及对交通环境的反应这几个影响因素,提出一种结合有自身驱动力、行人间的作用力、小组抱团力、障碍物对行人的作用力、信号灯对行人的影响力以及斑马线对行人的影响力的社会力模型,通过该社会力模型预测得到行人的过街行为,提高了预测准确率。本发明实施例方法时间简单,计算复杂度低,能够在实车嵌入式控制器上实现,有很好的应用前景。
附图说明
[0047]
图1为本发明实施例的考虑多因素的行人过街行为预测方法的流程图。
具体实施方式
[0048]
下面对本发明的技术方案进行详细的说明。
[0049]
一种考虑多因素的行人过街行为预测方法,如图1所示,包括以下步骤:
[0050]
步骤10)根据行人对于自身到达目的地的需求,获得行人自身的自驱力;
[0051]
步骤20)根据行人在行走过程中受到周围其他行人的影响,获得行人间的作用力和同组行人间的小组抱团力;
[0052]
步骤30)根据行人对于障碍物的避让行为,获得障碍物对行人的作用力;
[0053]
步骤40)根据行人对交通环境的反应,获得信号灯对行人的影响力以及斑马线对行人的影响力;
[0054]
步骤50)结合行人自身的自驱力、行人间的作用力、同组行人间的小组抱团力、障碍物对行人的作用力、信号灯对行人的影响力以及斑马线对行人的影响力,预测得到行人过街行为。
[0055]
现有方法多使用于室内人群密集的地方,并不能很好的使用在室外描述人的活动,此外,现有方法中多使用相互作用力的方法描述行人与车辆之间的关系,不能对行人的速度、轨迹进行很好的预测。
[0056]
本发明实施例方法,考虑到行人在过街过程中对于自身达到目的地的需求、受到周围其他行人的影响、对于障碍物的避让以及对交通环境的反应这几个影响因素,提出一种结合有自身驱动力、行人间的作用力、小组抱团力、障碍物对行人的作用力、信号灯对行人的影响力以及斑马线对行人的影响力的社会力模型,可以更好的描述行人在碰到车辆时的行为轨迹,通过该社会力模型预测得到行人的过街行为,提高了预测准确率。本发明实施例方法时间简单,计算复杂度低,能够在实车嵌入式控制器上实现,有很好的应用前景。
[0057]
其中,所述步骤10)中,利用式(1)得到行人α自身的自驱力:
[0058][0059]
式中,表示行人α自身的自驱力,τ表示行人α自身的反应时间,表示行人α期望达到的最大速度,表示行人α当前位置指向目标位置的单位向量,表示行人α的当前速度。
[0060]
优选的,本发明实施例方法还包括:
[0061]
步骤601)在遇到车辆时,根据行人与车辆在通过路口时的收益与损失,基于演化博弈论计算行人通过马路的博弈因子。
[0062]
具体的,对于行人与车辆建立演化博弈论模型,其中博弈主体为行人与车辆驾驶员,博弈策略的集合为通过与不通过,设定行人与车辆的收益与损失变量如表1所示:
[0063]
表1行人与车辆的收益与损失变量表
[0064]
行人\车辆通过不通过通过(r,s)(p,n)不通过(m,v)(j,k)
[0065]
表格中参数表示在该状况下的收益与损失,其中收益为正,损失为负。
[0066]
其中,收益与损失变量说明如表2所示:
[0067]
表2收益与损失变量说明表
[0068][0069]
r表示行人与车辆发生冲突时行人的冲突损失,s表示行人与车辆发生冲突时车辆的冲突损失,m表示行人在等待车辆通过时的等待损失,n表示车辆在等待行人通过时的等待损失,j表示车辆与行人均未通过时行人的互让损失,k表示车辆与行人均未通过时车辆的互让损失。参数的具体值由车辆与行人的不同种类和速度决定,可以反应出人在遭遇不同车辆情况下的行为。
[0070]
设行人通过的概率为x,则不通过概率为1
‑
x,同理设车辆通过的概率为y,则不通过概率为1
‑
y,可以计算得出行人的期望收益如下:
[0071]
若通过:e
p1
=p
‑
ry,
[0072]
若不通过:e
p2
=p
‑
j (j
‑
m)y,
[0073]
则概率通过混合收益:e
p
=p
‑
j
‑
(j r
‑
m)xy jx (j
‑
m)y,可求得行人对自身通过概率调整:
[0074]
同理可求得车辆的期望收益:
[0075]
通过:e
p1
=v
‑
sx,
[0076]
不通过:e
p2
=v
‑
k (k
‑
n)x,
[0077]
概率通过混合收益:e
p
=v
‑
k
‑
(k s
‑
n)xy ky (k
‑
n)x,车辆对自身通过概率调整:
[0078]
得到式(2)所示微分方程组:
[0079][0080][0080][0081]
使用龙格库塔法求解上述微分方程组,可得到行人通过马路的博弈因子,即行人通过的概率x,车辆通过的概率y。
[0082]
在计算中,车辆通过的初始概率y0设定为0.5,通过行人和车道的位置关系以及行人本身的速度求得行人的初始概率x0,其具体表达式如下:
[0083][0084]
式中,b表示车宽加安全距离,s表示行人到车道中线的距离,v表示当前行人速度,t表示车辆与行人预计发生碰撞的时间。
[0085]
步骤602)通过行人通过马路的博弈因子修正行人期望达到的最大速度。
[0086]
具体的,行人的期望最大速度为修正后速度为再带入式(1)中,得到新的行人自身的自驱力。
[0087]
本发明实施例方法,在遭遇车辆后,通过博弈因子修正行人的最大期望速度,从而得到新的行人自身的自驱力,可以更好的反应行人在遭遇车辆时的行为,也就是先减速判断是否可以通过,若可以通过则加速通过该路口,若不能通过则减速至0,也可以反应出行人在判断时可能出现的先加速再减速停止或是先减速再加速通过的行为。
[0088]
优选的,所述步骤20)中,利用式(3)得到行人间作用力:
[0089][0090]
式中,表示行人β对于行人α的作用力,表示行人β对于行人α的作用力,表示作用的强度,表示作用力的范围,γ
αβ
表示行人α与行人β的半径之和,表示由行人β指向行人α的方向向量:d
αβ
表示行人α与行人β之间的距离,k表示第一常数,k表示第二常数,k和k均为很大的常数,f
αβ
表示个体的各向异性:λ
α
表示行人α的运动
的各项异性,0≤λ
α
≤1,表示行人α与行人β运动方向夹角,表示当前行人α位置指向目标位置的单位向量。
[0091]
利用式(4)得到同组行人间的小组抱团力:
[0092][0093]
式中,表示行人α受到的同组行人间的小组抱团力,a
α_group
表示作用力的强度,b
α_group
表示作用力随距离变化的系数,表示行人α到小组中心点的矢量:表示行人α到小组中心点的矢量:表示该组行人的中心位置:表示该组行人的中心位置:表示组内每个个体的位置向量,d
α
表示行人α与该组行人的中心位置。
[0094]
本发明实施例方法中采用式(4)计算得到小组抱团力,可以更好地描述一组行人在一起前进时更趋向于相互靠近的行为,从而得到的社会学模型更好地描述人在碰到车辆时的行为轨迹,通过该社会力模型预测预测得到地行人过街行为更准确。
[0095]
其中,所述步骤30)中,利用式(5)得到障碍物对行人的作用力:
[0096][0097]
式中,表示障碍物b对行人α作用力,a
αb
表示作用力强度,b
αb
表示作用力范围,表示由b指向α的方向向量,r
α
表示行人α半径,d
αb
表示行人α与障碍物b之间地距离。
[0098]
其中,所述步骤40)中,利用式(6)得到信号灯对于行人的影响力:
[0099][0100]
式中,表示信号灯对行人α的作用力,a
l
表示作用力强度,p
α
表示行人当前位置,p
end
表示目标位置,b
l
表示作用力范围,t
limit
表示绿灯剩余时间,表示从行人当前位置指向目标位置的方向向量。
[0101]
本发明实施例方法中,式(6)在计算信号灯对于行人的影响力时,考虑了行人会在过马路时信号灯的最后几秒加速通过路口该因素,更好地描述行人在遇到信号灯时的行为,从而得到的社会学模型更好地描述人在碰到车辆时的行为轨迹,通过该社会力模型预测预测得到地行人过街行为更准确。
[0102]
利用式(7
‑
1)或式(7
‑
2)得到斑马线对行人的影响力:
[0103]
若行人在斑马线外时,
[0104][0105]
式中,表示斑马线n对行人α的吸引力,a
n
表示吸引力强度,b
n
表示距离系数,δx
nα
表示行人α距离斑马线n距离,表示由行人α垂直指向斑马线n的方向向量。
[0106]
若行人在斑马线内时,
[0107]
当时,时,
[0108]
式中,v
α
表示行人当前速度,表示斑马线n对行人α的约束力,a
in
表示吸引力强度,b
in
表示距离系数,δx
′
nα
表示行人α距离斑马线n中线距离,表示由行人α垂直指向斑马线n中线的方向向量。
[0109]
本发明实施例方法中,在计算斑马线对于行人的影响力时,考虑了行人在斑马线外更倾向于走斑马线过马路,以及不愿意离开斑马线进行避让对向行人的因素,更好地描述行人在斑马线时的行为,从而得到的社会学模型更好地描述人在碰到车辆时的行为轨迹,通过该社会力模型预测预测得到地行人过街行为更准确。
[0110]
其中,所述步骤50)具体包括:
[0111]
利用式(8)预测得到行人的前进轨迹和速度:
[0112][0113]
式中,表示行人α所受合力,表示行人自身的自驱力表示行人自身的自驱力表示行人α所受其他行人的合力,包括行人间作用力合同组行人间的小组抱团力,表示行人α所受环境施加的合力,包括障碍物对行人的作用力、信号灯对行人的作用力和斑马线对行人的作用力。
[0114]
预测过程中会不断地通过式(8)计算行人α所受合力,直到行人通过马路,就可以得到在此过程中行人通过马路的前进轨迹。
[0115]
以上显示和描述了本发明的基本原理、主要特征和优点。本领域的技术人员应该了解,本发明不受上述具体实施例的限制,上述具体实施例和说明书中的描述只是为了进一步说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。本发明要求保护的范围由权利要求书及其等效物界定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。