1.本发明涉及告警系统技术领域,具体为一种无人值守设备周边环境异常探测及告警系统。
背景技术:
2.告警系统是利用监控设备对指定的目标范围进行监控并进行告警的监控探测系统,当利用告警系统对指定目标进行监控时,当指定目标的监控范围内部出现可疑车辆或人员时,需要对其作出相应的反应,现有的无人值守的监控告警设备在使用时,只能简单的对指定目标进行监控,无法对可疑车辆或人员的行为进行实时监控,监控探测效果不好,其中一些监控设备在对可疑车辆或人员进行监控时,可能会使指定目标脱离监控的范围,造成一定时间的监控盲区,不利于指定目标的实时监控。
3.为解决以上问题,我们提出了一种无人值守设备周边环境异常探测及告警系统,可对可疑车辆或人员的行为在监控范围内进行实时监测,监控异常探测效果好,同时可防止指定目标脱离监控的范围,保证对指定目标的实时监控,有利于提高指定目标监控的效果。
技术实现要素:
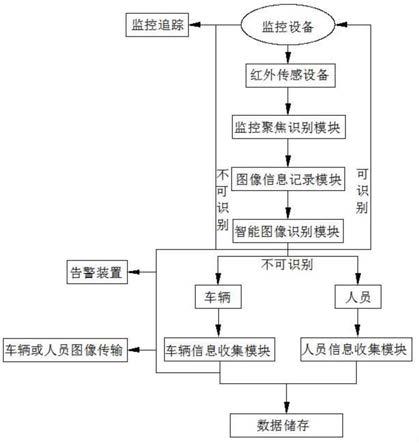
4.为实现以上无人值守设备周边环境异常探测及告警系统目的,本发明通过以下技术方案予以实现:一种无人值守设备周边环境异常探测及告警系统,包括:监控设备:用于对置定目标进行监控;红外传感设备:用于感应车辆和人员;监控聚焦识别模块:用于对红外传感设备感应的车辆或人员进行图片信息采集;图像信息记录模块:用于储存已授权的车辆和施工人员的图片信息;智能图像识别模块:用于将监控聚焦识别模块采集的图片信息与图片信息记录模块中存储的信息进行对比分析;车辆信息收集模块:用于对监控聚焦识别模块采集的未授权的车辆信息进行收集;人员信息收集模块:用于对监控聚焦识别模块采集的未授权的人员信息进行收集;数据储存:用于对车辆信息收集模块和人员信息收集模块收集的信息进行收集存储;警告装置:用于发出警告,并提醒;车辆或人员图像传输:用于将车辆信息收集模块或人员信息收集模块采集的图片信息传输到值守人员所在处;监控追踪:用于在监控范围内对未授权的车辆或人员进行监控追踪。
5.进一步的,所述智能图像识别模块内部由车辆识别模块和人员识别模块组成,车
辆识别模块与车辆信息收集模块之间电连接,人员识别模块与人员信息收集模块之间电连接。
6.进一步的,所述智能图像识别模块同时与监控设备、警告装置和车辆或人员图片传输电连接。
7.一种无人值守设备周边环境的监控调节装置,包括支撑杆、安装架、底板和监控器,所述支撑杆的内部设置有追踪调控机构,所述追踪调控机构包括齿筒,所述齿筒的表面啮合与传动齿轮,所述传动齿轮的下表面设置有电磁伸缩杆,所述传动齿轮的表面啮合有齿盘,所述齿盘的外表面固定连接有槽板。
8.进一步的,所述安装架、底板和监控器均有两组,监控器与安装架和底板固定连接,传动齿轮有两组,位于齿筒表面的上下两端,均与齿筒的表面相适配,下端均设计有电磁伸缩杆,齿盘有两组,与两个传动齿轮相对应,两个齿盘均与支撑杆的表面转动连接。
9.进一步的,所述槽板与对应的监控器相对应,表面开设有滑槽,与槽板对应的底板的下端位于槽板表面滑槽的内部。
10.所述支撑杆的上端固定连接有支撑盘,所述支撑盘的上表面设置有位置感应器,所述支撑盘的侧表面滑动连接有支板,所述支板的下表面设置有支轴,所述监控器的表面设置有红外感应器。
11.进一步的,所述位置感应器有两个,均与两个传动齿轮表面的电磁伸缩杆电连接,支板有两组,分别与两组监控器相对应,支轴的下端与对应的安装架转动连接,红外感应器与两个传动齿轮表面的电磁伸缩杆电连接和齿筒。
12.所述支撑杆的内部设置有调节机构,所述调节机构包括传动轴,所述传动轴的表面固定连接有棘轮,所述棘轮的表面啮合有棘爪盘,所述棘爪盘的表面固定连接有偏心盘,所述偏心盘的表面滑动连接偏心杆,偏心杆的表面固定连接有调节杆。
13.进一步的,所述传动轴与红外感应器之间为电连接,棘轮和棘爪盘有两组,呈上下分布,其表面的齿面安装方向相反,两个棘爪盘均与支撑杆的表面转动连接,偏心盘有两组,与对应的棘爪盘采用偏心安装,调节杆远离偏心杆的一端与对应的安装架滑动连接。
14.与现有技术相比,本发明具有以下有益效果:1、该无人值守设备周边环境异常探测及告警系统,通过监控聚焦识别模块和图像信息记录模块与智能图像识别模块的配合使用,可对可疑车辆或人员进行识别,同时可对可疑车辆或人员的信息进行采集,便于后期对可以车辆或人员进行查找,智能图像识别模块和监控设备与监控追踪的配合使用,可在监控范围内部对可疑车辆或人员的行为进行实时监控,以对可疑车辆或人员的行为作出判断,可有利于提高指定目标监控的效果。
15.2、该无人值守设备周边环境异常探测及告警系统,通过传动轴与棘轮和棘爪盘的配合使用,可单向带动偏心盘转动,偏心盘与偏心杆的配合使用,可带动调节杆做往复移动,便于通过调节杆对监控器的监控角度进行调节,可有效提高监控器监控的效果。
16.3、该无人值守设备周边环境异常探测及告警系统,通过位置感应器和红外感应器与电磁伸缩杆的配合使用,可以控制传动齿轮与齿盘之间的位置关系,齿筒与传动齿轮的配合使用,可以带动齿盘转动,齿盘与槽板的配合使用,可以通过底板带动监控器转动,以此即可对可疑车辆或人员进行实时监控,同时可保证对指定目标的实时监控,可有效提高指定目标监控的效果。
附图说明
17.图1为本发明系统结构示意图;图2为本发明立体结构示意图;图3为本发明主视结构示意图;图4为本发明俯视结构示意图;图5为本发明调节机构相关结构示意图;图6为本发明追踪调控机构相关结构主视图;图7为本发明追踪调控机构相关结构俯视图。
18.图中:1、支撑杆;2、支撑盘;3、位置感应器;4、支板;41、支轴;5、安装架;51、底板;6、监控器;61、红外感应器;7、调节机构;71、传动轴;72、棘轮;73、棘爪盘;74、偏心盘;75、偏心杆;76、调节杆;8、追踪调控机构;81、齿筒;82、传动齿轮;83、电磁伸缩杆;84、齿盘;85、槽板。
具体实施方式
19.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
20.该无人值守设备周边环境异常探测及告警系统的实施例如下:实施例一:请参阅图2
‑
7,一种无人值守设备周边环境的监控调节装置,包括支撑杆1、安装架5、底板51和监控器6,安装架5、底板51和监控器6均有两组,监控器6与安装架5和底板51固定连接,用于对监控器6进行支撑,支撑杆1的上端固定连接有支撑盘2,用于支板4的支撑和转动,支撑盘2的上表面设置有位置感应器3,位置感应器3有两个,均与两个传动齿轮82表面的电磁伸缩杆83电连接,用于感应监控器6的位置,并对电磁伸缩杆83和传动轴71进行控制。
21.支撑盘2的侧表面滑动连接有支板4,支板4有两组,分别与两组监控器6相对应,用于监控器6的支撑,支板4的下表面设置有支轴41,支轴41的下端与对应的安装架5转动连接,用于安装架5的转动,监控器6的表面设置有红外感应器61,红外感应器61与两个传动齿轮82表面的电磁伸缩杆83电连接和齿筒81,用于对可疑车辆或人员进行感应,同时对传动轴71和齿筒81进行控制,支撑杆1的内部设置有调节机构7,用于对监控器6的角度进行调节。
22.支撑杆1的内部设置有追踪调控机构8,用于利用监控器6对可疑车辆或人员进行实时追踪监控,追踪调控机构8包括齿筒81,与传动齿轮82啮合,带动传动齿轮82转动,齿筒81的表面啮合与传动齿轮82,传动齿轮82有两组,位于齿筒81表面的上下两端,均与齿筒81的表面相适配,与齿盘84啮合,带动齿盘84转动,下端均设计有电磁伸缩杆83,传动齿轮82的下表面设置有电磁伸缩杆83,用于控制传动齿轮82与齿盘84的位置关系。
23.传动齿轮82的表面啮合有齿盘84,齿盘84有两组,与两个传动齿轮82相对应,两个齿盘84均与支撑杆1的表面转动连接,用于带动槽板85转动,齿盘84的外表面固定连接有槽
板85,槽板85与对应的监控器6相对应,表面开设有滑槽,与槽板85对应的底板51的下端位于槽板85表面滑槽的内部,用于通过底板51带动监控器6转动。
24.实施例二:请参阅图2
‑
7,一种无人值守设备周边环境的监控调节装置,包括支撑杆1、安装架5、底板51和监控器6,安装架5、底板51和监控器6均有两组,监控器6与安装架5和底板51固定连接,用于对监控器6进行支撑,支撑杆1的上端固定连接有支撑盘2,用于支板4的支撑和转动,支撑盘2的上表面设置有位置感应器3,位置感应器3有两个,均与两个传动齿轮82表面的电磁伸缩杆83电连接,用于感应监控器6的位置,并对电磁伸缩杆83和传动轴71进行控制。
25.支撑盘2的侧表面滑动连接有支板4,支板4有两组,分别与两组监控器6相对应,用于监控器6的支撑,支板4的下表面设置有支轴41,支轴41的下端与对应的安装架5转动连接,用于安装架5的转动,监控器6的表面设置有红外感应器61,红外感应器61与两个传动齿轮82表面的电磁伸缩杆83电连接和齿筒81,用于对可疑车辆或人员进行感应,同时对传动轴71和齿筒81进行控制,支撑杆1的内部设置有调节机构7,用于对监控器6的角度进行调节。
26.支撑杆1的内部设置有调节机构7,用于对监控器6的角度进行调节,调节机构7包括传动轴71,传动轴71与红外感应器61之间为电连接,用于带动棘轮72转动,传动轴71的表面固定连接有棘轮72,棘轮72和棘爪盘73有两组,呈上下分布,其表面的齿面安装方向相反,与对应的棘爪盘73啮合,带动棘爪盘73转动,棘轮72的表面啮合有棘爪盘73,两个棘爪盘73均与支撑杆1的表面转动连接,用于带动偏心盘74转动。
27.棘爪盘73的表面固定连接有偏心盘74,偏心盘74有两组,与对应的棘爪盘73采用偏心安装,用于带动偏心杆75做往复移动,偏心盘74的表面滑动连接偏心杆75,用于带动调节杆76移动,偏心杆75的表面固定连接有调节杆76,调节杆76远离偏心杆75的一端与对应的安装架5滑动连接,用于带动安装架5转动,支撑杆1的内部设置有追踪调控机构8,用于利用监控器6对可疑车辆或人员进行实时追踪监控。
28.实施例三:请参阅图1
‑
7,一种无人值守设备周边环境异常探测及告警系统,包括:监控设备:用于对置定目标进行监控;红外传感设备:用于感应车辆和人员;监控聚焦识别模块:用于对红外传感设备感应的车辆或人员进行图片信息采集;图像信息记录模块:用于储存已授权的车辆和施工人员的图片信息;智能图像识别模块:用于将监控聚焦识别模块采集的图片信息与图片信息记录模块中存储的信息进行对比分析;车辆信息收集模块:用于对监控聚焦识别模块采集的未授权的车辆信息进行收集;人员信息收集模块:用于对监控聚焦识别模块采集的未授权的人员信息进行收集;数据储存:用于对车辆信息收集模块和人员信息收集模块收集的信息进行收集存储;
警告装置:用于发出警告,并提醒;车辆或人员图像传输:用于将车辆信息收集模块或人员信息收集模块采集的图片信息传输到值守人员所在处;监控追踪:用于在监控范围内对未授权的车辆或人员进行监控追踪。
29.智能图像识别模块内部由车辆识别模块和人员识别模块组成,车辆识别模块与车辆信息收集模块之间电连接,人员识别模块与人员信息收集模块之间电连接。
30.智能图像识别模块同时与监控设备、警告装置和车辆或人员图片传输电连接。
31.一种无人值守设备周边环境的监控调节装置,包括支撑杆1、安装架5、底板51和监控器6,安装架5、底板51和监控器6均有两组,监控器6与安装架5和底板51固定连接,用于对监控器6进行支撑,支撑杆1的上端固定连接有支撑盘2,用于支板4的支撑和转动,支撑盘2的上表面设置有位置感应器3,位置感应器3有两个,均与两个传动齿轮82表面的电磁伸缩杆83电连接,用于感应监控器6的位置,并对电磁伸缩杆83和传动轴71进行控制。
32.支撑盘2的侧表面滑动连接有支板4,支板4有两组,分别与两组监控器6相对应,用于监控器6的支撑,支板4的下表面设置有支轴41,支轴41的下端与对应的安装架5转动连接,用于安装架5的转动,监控器6的表面设置有红外感应器61,红外感应器61与两个传动齿轮82表面的电磁伸缩杆83电连接和齿筒81,用于对可疑车辆或人员进行感应,同时对传动轴71和齿筒81进行控制。
33.支撑杆1的内部设置有调节机构7,用于对监控器6的角度进行调节,支撑杆1的内部设置有调节机构7,用于对监控器6的角度进行调节,调节机构7包括传动轴71,传动轴71与红外感应器61之间为电连接,用于带动棘轮72转动,传动轴71的表面固定连接有棘轮72,棘轮72和棘爪盘73有两组,呈上下分布,其表面的齿面安装方向相反,与对应的棘爪盘73啮合,带动棘爪盘73转动,棘轮72的表面啮合有棘爪盘73,两个棘爪盘73均与支撑杆1的表面转动连接,用于带动偏心盘74转动。
34.棘爪盘73的表面固定连接有偏心盘74,偏心盘74有两组,与对应的棘爪盘73采用偏心安装,用于带动偏心杆75做往复移动,偏心盘74的表面滑动连接偏心杆75,用于带动调节杆76移动,偏心杆75的表面固定连接有调节杆76,调节杆76远离偏心杆75的一端与对应的安装架5滑动连接,用于带动安装架5转动。
35.支撑杆1的内部设置有追踪调控机构8,支撑杆1的内部设置有追踪调控机构8,用于利用监控器6对可疑车辆或人员进行实时追踪监控,追踪调控机构8包括齿筒81,与传动齿轮82啮合,带动传动齿轮82转动,齿筒81的表面啮合与传动齿轮82,传动齿轮82有两组,位于齿筒81表面的上下两端,均与齿筒81的表面相适配,与齿盘84啮合,带动齿盘84转动,下端均设计有电磁伸缩杆83。
36.传动齿轮82的下表面设置有电磁伸缩杆83,用于控制传动齿轮82与齿盘84的位置关系,传动齿轮82的表面啮合有齿盘84,齿盘84有两组,与两个传动齿轮82相对应,两个齿盘84均与支撑杆1的表面转动连接,用于带动槽板85转动,齿盘84的外表面固定连接有槽板85,槽板85与对应的监控器6相对应,表面开设有滑槽,与槽板85对应的底板51的下端位于槽板85表面滑槽的内部,用于通过底板51带动监控器6转动。
37.在使用时,利用其中一组监控器6对目标进行监控,另一组监控器6处于备用状态,此时两个监控器6的位置与两个位置感应器3的位置相对应,当有人员或车辆进入到监控器
6监控的范围内部时,此时红外感应器61会感应到人员或车辆的进入,同时会将信号传送给传动轴71和电磁伸缩杆83的驱动设备。
38.传动轴71的驱动设备启动时,会带动传动轴71转动,传动轴71会带动棘轮72转动,与正在监控的监控器6对应的棘轮72会与对应的棘爪盘73啮合,带动棘爪盘73转动,棘爪盘73带动偏心盘74转动,偏心盘74带动偏心杆75移动,偏心杆75带动调节杆76移动,调节杆76带动安装架5在支轴41的下端转动,安装架5带动监控器6一起转动,以此对监控器6在竖直方向上的角度进行调节,使监控器6进一步对车辆或人员进行监控。
39.随着人员或车辆的移动,通过相关驱动设备带动齿筒81转动,齿筒81通过与传动齿轮82啮合,带动传动齿轮82转动,与正在监控的监控器6对应的电磁伸缩杆83的启动会推动对应的传动齿轮82移动,使传动齿轮82同时与对应的齿盘84啮合,并带动齿盘84转动,齿盘84带动槽板85转动,槽板85通过底板51带动安装架5一起转动,安装架5带动监控器6一起转动,以此对人员或车辆进行追踪监控。
40.当正在监控的监控器6对人员或车辆进行追踪监控,并脱离目标的监控范围时,此时与其对用的位置感应器3会将信号传送给另一组监控器6中的电磁伸缩杆83,另一组中的电磁伸缩杆83的启动会推动对应的传动齿轮82移动,使传动齿轮82同时与对应的齿盘84啮合,并带动齿盘84转动,齿盘84带动槽板85转动,槽板85通过底板51带动安装架5一起转动,安装架5带动监控器6一起转动,当该监控器6转动到目标监控的位置时,此时该位置的位置感应器3会感应到,相应地,该组中的电磁伸缩杆83启动,使传动齿轮82与对应的齿盘84脱离,该监控器6不再转动,保持对目标进行监控的状态。
41.当人员或车辆走出另一组监控器6的监控范围时,此时该监控器6继续转动,当其转动到备用位置监控器6的位置时,此时该位置的位置感应器3会感应到,相应地,该组中的电磁伸缩杆83启动,使传动齿轮82与对应的齿盘84脱离,该监控器6不再转动,作为备用监控器6,准备下次监控使用。
42.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。