1.本发明涉及自动化控制领域,尤其涉及一种用于车辆降速的自动化管理系统及方法。
背景技术:
2.自动化控制技术广泛用于工业、农业、军事、科学研究、交通运输、商业、医疗、服务和家庭等方面。采用自动化控制不仅可以把人从繁重的体力劳动、部分脑力劳动以及恶劣、危险的工作环境中解放出来,而且能扩展人的器官功能,极大地提高劳动生产率,增强人类认识世界和改造世界的能力。因此,自动化控制是工业、农业、国防和科学技术现代化的重要条件和显著标志。目前,在公路上安装减速带以实现对学校、工厂等场所前方的道路通行区域执行车辆减速处理已经成为常规操作。然而,在实际使用中,如果公路上长期不存在车辆通行而减速带仍一直保持凸起状态,必然对行人、自行车以及电动车的通行带来阻碍。
技术实现要素:
3.为了解决现有技术中的技术问题,本发明提供了一种用于车辆降速的自动化管理系统及方法,能够根据限行单行道的降速带安装区域的前方是否存在即将到来的车流量目标决定是否将降速带从收缩到地面下的状态切换到凸起在地面上的状态,从而兼顾通行和减速二种不同需求。
4.为此,本发明至少需要具备以下四处重要的发明点:
5.(1)采用由多个信号处理组件构成的现场鉴别机制对单行道的来车方向是否检测到较近车辆目标,从而为后续处理提供参考数据;
6.(2)在检测到单行道的来车方向存在较近车辆目标时,触发默认状态位于地面下方的降速带升起以实现对即将到来的车辆目标的减速操作,否则,将降速带退入到地面下方以便于行人、自行车通行;
7.(3)使用地面封闭结构用于在自动升降带体进入默认状态时,完成对自动升降带体上方地面的封闭操作,还用于在自动升降带体进入升起状态时,结束对自动升降带体上方地面的封闭操作;
8.(4)使用现场协作设备用于实现永磁无刷电机和地面封闭结构二者动作的同步,以完成自动升降带体和地面封闭结构的同步控制。
9.根据本发明的一方面,提供了一种用于车辆降速的自动化管理系统,所述系统包括:
10.自动升降带体,用于在默认状态下收缩在所述监控安装结构正下方的限速单行道的地面下方;
11.其中,所述自动升降带体还用于在升起状态下从地面升起以呈现为在地面上的条状凸起以用于过往车辆降速。
12.更具体地,在所述用于车辆降速的自动化管理系统中,还包括:
13.永磁无刷电机,与所述自动升降带体连接,用于在接收到所述车辆接近信号时,驱动所述自动升降带体以从所述默认状态进入所述升起状态,还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态。
14.更具体地,在所述用于车辆降速的自动化管理系统中,还包括:
15.地面封闭结构,以封闭面部架构来实现,用于在所述自动升降带体进入默认状态时,完成对自动升降带体上方地面的封闭操作,还用于在所述自动升降带体进入升起状态时,结束对自动升降带体上方地面的封闭操作;
16.现场协作设备,分别与所述永磁无刷电机和所述地面封闭结构连接,用于实现所述永磁无刷电机和所述地面封闭结构二者动作的同步;
17.监控安装结构,设置在限速单行道的正上方,为横杆架构,用于为限速单行道安装监控设施提供安装位置;
18.幅值分析设备,设置在所述监控安装结构的中央位置,用于在监听到附近声音最大幅值大于等于预设幅值阈值时,发出抓拍请求指令;
19.触发式摄像机,设置在所述幅值分析设备附近且与所述幅值分析设备连接,用于在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像;
20.信号分辨设备,与触发式摄像机连接,用于检测触发式摄像机发送的单行车道图像中的各个车辆目标;
21.面积判断设备,与所述信号分辨设备连接,用于在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
22.其中,在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号包括:在所述单行车道图像中存在占据像素点数量大于设定数量限量的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
23.其中,在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像包括:相对于所述限速单行道允许通行的方向,抓拍操作的拍摄方向与所述限速单行道允许通行的方向相反;
24.其中,检测所述单行车道图像中的各个车辆目标包括:基于各种车型分别对应的各个车辆基准轮廓检测所述单行车道图像中的各个车辆目标;
25.其中,所述永磁无刷电机还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态;
26.其中,所述触发式摄像机还用于在接收到所述抓拍终止指令时,停止执行对所述限速单行道来车方向的抓拍操作。
27.根据本发明的另一方面,还提供了一种用于车辆降速的自动化管理方法,所述方法包括:
28.使用自动升降带体,用于在默认状态下收缩在所述监控安装结构正下方的限速单行道的地面下方;
29.其中,所述自动升降带体还用于在升起状态下从地面升起以呈现为在地面上的条状凸起以用于过往车辆降速。
30.更具体地,在所述用于车辆降速的自动化管理方法中,还包括:
31.使用永磁无刷电机,与所述自动升降带体连接,用于在接收到所述车辆接近信号时,驱动所述自动升降带体以从所述默认状态进入所述升起状态,还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态。
32.更具体地,在所述用于车辆降速的自动化管理方法中,还包括:
33.使用地面封闭结构,以封闭面部架构来实现,用于在所述自动升降带体进入默认状态时,完成对自动升降带体上方地面的封闭操作,还用于在所述自动升降带体进入升起状态时,结束对自动升降带体上方地面的封闭操作;
34.使用现场协作设备,分别与所述永磁无刷电机和所述地面封闭结构连接,用于实现所述永磁无刷电机和所述地面封闭结构二者动作的同步;
35.使用监控安装结构,设置在限速单行道的正上方,为横杆架构,用于为限速单行道安装监控设施提供安装位置;
36.使用幅值分析设备,设置在所述监控安装结构的中央位置,用于在监听到附近声音最大幅值大于等于预设幅值阈值时,发出抓拍请求指令;
37.使用触发式摄像机,设置在所述幅值分析设备附近且与所述幅值分析设备连接,用于在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像;
38.使用信号分辨设备,与触发式摄像机连接,用于检测触发式摄像机发送的单行车道图像中的各个车辆目标;
39.使用面积判断设备,与所述信号分辨设备连接,用于在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
40.其中,在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号包括:在所述单行车道图像中存在占据像素点数量大于设定数量限量的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
41.其中,在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像包括:相对于所述限速单行道允许通行的方向,抓拍操作的拍摄方向与所述限速单行道允许通行的方向相反;
42.其中,检测所述单行车道图像中的各个车辆目标包括:基于各种车型分别对应的各个车辆基准轮廓检测所述单行车道图像中的各个车辆目标;
43.其中,所述永磁无刷电机还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态;
44.其中,所述触发式摄像机还用于在接收到所述抓拍终止指令时,停止执行对所述限速单行道来车方向的抓拍操作。
附图说明
45.以下将结合附图对本发明的实施方案进行描述,其中:
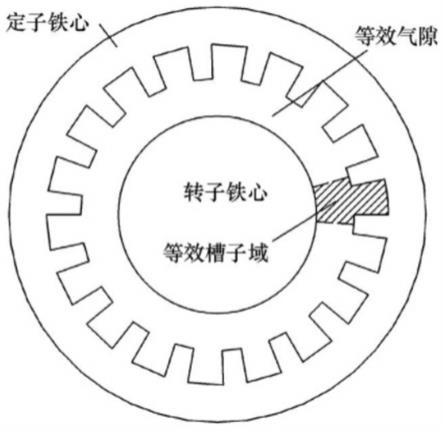
46.图1为根据本发明实施方案示出的用于车辆降速的自动化管理系统及方法所应用的永磁无刷电机的内部结构图。
具体实施方式
47.下面将对本发明的用于车辆降速的自动化管理方法的实施方案进行详细说明。
48.永磁式电动机由定子磁极、转子、电刷、外壳等组成,定子磁极采用永磁体(永久磁钢),有铁氧体、铝镍钴、钕铁硼等材料。按其结构形式可分为圆筒型和瓦块型等几种。录放机中使用的电多数为圆筒型磁体,而电动工具及汽车用电器中使用的电动机多数采用专块型磁体。转子一般采用硅钢片叠压而成,较电磁式电动机转子的槽数少。录放机中使用的小功率电动机多数为3槽,较高档的为5槽或7槽。漆包线绕在转子铁心的两槽之间(三槽即有三个绕组),其各接头分别焊在换向器的金属片上。电刷是连接电源与转子绕组的导电部件,具备导电与耐磨两种性能。永磁电动机的电刷使用单性金属片或金属石墨电刷、电化石墨电刷。目前,在公路上安装减速带以实现对学校、工厂等场所前方的道路通行区域执行车辆减速处理已经成为常规操作。然而,在实际使用中,如果公路上长期不存在车辆通行而减速带仍一直保持凸起状态,必然对行人、自行车以及电动车的通行带来阻碍。
49.为了克服上述不足,本发明搭建了一种用于车辆降速的自动化管理系统及方法,能够有效解决相应的技术问题。
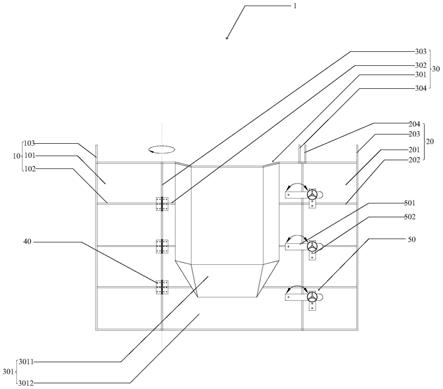
50.根据本发明实施方案示出的用于车辆降速的自动化管理系统包括:
51.自动升降带体,用于在默认状态下收缩在所述监控安装结构正下方的限速单行道的地面下方;
52.其中,所述自动升降带体还用于在升起状态下从地面升起以呈现为在地面上的条状凸起以用于过往车辆降速。
53.接着,继续对本发明的用于车辆降速的自动化管理系统的具体结构进行进一步的说明。
54.所述用于车辆降速的自动化管理系统中还可以包括:
55.永磁无刷电机,其内部结构如图1所示,与所述自动升降带体连接,用于在接收到所述车辆接近信号时,驱动所述自动升降带体以从所述默认状态进入所述升起状态,还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态。
56.所述用于车辆降速的自动化管理系统中还可以包括:
57.地面封闭结构,以封闭面部架构来实现,用于在所述自动升降带体进入默认状态时,完成对自动升降带体上方地面的封闭操作,还用于在所述自动升降带体进入升起状态时,结束对自动升降带体上方地面的封闭操作;
58.现场协作设备,分别与所述永磁无刷电机和所述地面封闭结构连接,用于实现所述永磁无刷电机和所述地面封闭结构二者动作的同步;
59.监控安装结构,设置在限速单行道的正上方,为横杆架构,用于为限速单行道安装监控设施提供安装位置;
60.幅值分析设备,设置在所述监控安装结构的中央位置,用于在监听到附近声音最大幅值大于等于预设幅值阈值时,发出抓拍请求指令;
61.触发式摄像机,设置在所述幅值分析设备附近且与所述幅值分析设备连接,用于在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像;
62.信号分辨设备,与触发式摄像机连接,用于检测触发式摄像机发送的单行车道图像中的各个车辆目标;
63.面积判断设备,与所述信号分辨设备连接,用于在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
64.其中,在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号包括:在所述单行车道图像中存在占据像素点数量大于设定数量限量的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
65.其中,在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像包括:相对于所述限速单行道允许通行的方向,抓拍操作的拍摄方向与所述限速单行道允许通行的方向相反;
66.其中,检测所述单行车道图像中的各个车辆目标包括:基于各种车型分别对应的各个车辆基准轮廓检测所述单行车道图像中的各个车辆目标;
67.其中,所述永磁无刷电机还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态;
68.其中,所述触发式摄像机还用于在接收到所述抓拍终止指令时,停止执行对所述限速单行道来车方向的抓拍操作。
69.所述用于车辆降速的自动化管理系统中还可以包括:
70.浓度检测部件,设置在所述信号分辨设备的附近,用于测量所述信号分辨设备所在环境的灰尘浓度;
71.参数判断部件,设置在所述信号分辨设备的附近,与所述浓度检测部件连接,用于在接收到的灰尘浓度超限时,发出浓度报警指令。
72.所述用于车辆降速的自动化管理系统中还可以包括:
73.有线通信接口,与所述信号分辨设备连接,用于实时发送所述信号分辨设备的当前工作状态。
74.根据本发明实施方案示出的用于车辆降速的自动化管理方法包括:
75.使用自动升降带体,用于在默认状态下收缩在所述监控安装结构正下方的限速单行道的地面下方;
76.其中,所述自动升降带体还用于在升起状态下从地面升起以呈现为在地面上的条状凸起以用于过往车辆降速。
77.接着,继续对本发明的用于车辆降速的自动化管理方法的具体步骤进行进一步的说明。
78.所述用于车辆降速的自动化管理方法还可以包括:
79.使用永磁无刷电机,其内部结构如图1所示,与所述自动升降带体连接,用于在接收到所述车辆接近信号时,驱动所述自动升降带体以从所述默认状态进入所述升起状态,还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态。
80.所述用于车辆降速的自动化管理方法还可以包括:
81.使用地面封闭结构,以封闭面部架构来实现,用于在所述自动升降带体进入默认状态时,完成对自动升降带体上方地面的封闭操作,还用于在所述自动升降带体进入升起
状态时,结束对自动升降带体上方地面的封闭操作;
82.使用现场协作设备,分别与所述永磁无刷电机和所述地面封闭结构连接,用于实现所述永磁无刷电机和所述地面封闭结构二者动作的同步;
83.使用监控安装结构,设置在限速单行道的正上方,为横杆架构,用于为限速单行道安装监控设施提供安装位置;
84.使用幅值分析设备,设置在所述监控安装结构的中央位置,用于在监听到附近声音最大幅值大于等于预设幅值阈值时,发出抓拍请求指令;
85.使用触发式摄像机,设置在所述幅值分析设备附近且与所述幅值分析设备连接,用于在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像;
86.使用信号分辨设备,与触发式摄像机连接,用于检测触发式摄像机发送的单行车道图像中的各个车辆目标;
87.使用面积判断设备,与所述信号分辨设备连接,用于在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
88.其中,在所述单行车道图像中存在面积超限的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号包括:在所述单行车道图像中存在占据像素点数量大于设定数量限量的车辆目标时,发出车辆接近信号,否则,发出车辆远离信号;
89.其中,在接收到所述抓取请求指令时,执行对所述限速单行道来车方向的抓拍操作,以获得对应的单行车道图像包括:相对于所述限速单行道允许通行的方向,抓拍操作的拍摄方向与所述限速单行道允许通行的方向相反;
90.其中,检测所述单行车道图像中的各个车辆目标包括:基于各种车型分别对应的各个车辆基准轮廓检测所述单行车道图像中的各个车辆目标;
91.其中,所述永磁无刷电机还用于在接收到所述车辆远离信号时,驱动所述自动升降带体以从所述升起状态进入所述默认状态;
92.其中,所述触发式摄像机还用于在接收到所述抓拍终止指令时,停止执行对所述限速单行道来车方向的抓拍操作。
93.所述用于车辆降速的自动化管理方法还可以包括:
94.使用浓度检测部件,设置在所述信号分辨设备的附近,用于测量所述信号分辨设备所在环境的灰尘浓度;
95.使用参数判断部件,设置在所述信号分辨设备的附近,与所述浓度检测部件连接,用于在接收到的灰尘浓度超限时,发出浓度报警指令。
96.所述用于车辆降速的自动化管理方法还可以包括:
97.使用有线通信接口,与所述信号分辨设备连接,用于实时发送所述信号分辨设备的当前工作状态。
98.另外,在所述用于车辆降速的自动化管理系统及方法中,所述有线通信接口为一adsl通信接口。adsl是一种通过现有普通电话线为家庭、办公室提供宽带数据传输服务的技术,他能提供很高的数据传输频宽,宽到足以让电讯业大喘一口气。adsl方案不需要改造信号传输线路,它只需要有一对特殊的modem,其中一个modem被接到用户的计算机上,另一台则安装在电信公司的通讯中心里,将它们相联的依然是普通的电话线路。在采用adsl方
案后,数据传输的速度确实提高了很多。adsl方案的传输速度大约是isdn方案的50倍、卫星方案的20倍,同时它又不需要改制线路,因此adsl是目前比较可行的上网加速方案。
99.采用本发明的用于车辆降速的自动化管理系统及方法,针对现有技术中机场难以对每一辆摆渡车进行精确控制的技术问题,能够根据限行单行道的降速带安装区域的前方是否存在即将到来的车流量目标决定是否将降速带从收缩到地面下的状态切换到凸起在地面上的状态,从而提升了降速带体控制的智能化等级。
100.尽管上面仅详细描述了本发明的某些实施例,但是本领域技术人员将很容易意识到,在实施例中可以作出许多修改,而实质上并不脱离本发明的新颖教导和优点。因此,所有这些修改都应当被包括在本发明的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。