1.本发明涉及电机控制方法领域,具体是一种直线电机系统的预设性能鲁棒运动控制方法。
背景技术:
2.直线电机由于结构简单,几乎无机械摩擦损耗以及可以实现直接传动,传动效率高等特点,近年来,直线电机在数控机床、3d打印以及机器人等设备上获得了广泛的应用。
3.由于直线电机系统模型中的摩擦力耦合有符号函数,因此当系统运动部分的速度趋于平衡点附件时极容易引起高频扰动,且该高频扰动信号很难通过设计相关的干扰观测器加以有效估计,这将严重影响系统的控制精度,尤其是在直线电机系统高精度的应用场合,这一问题将更加凸显。另外,当系统的初始误差较大时,系统的初始调节阶段往往存在超调量过大的问题。
技术实现要素:
4.本发明的目的是提供一种直线电机系统的预设性能鲁棒运动控制方法,以解决现有技术直线电机系统存在的控制精度易受扰动、超调量过大的问题。
5.为了达到上述目的,本发明所采用的技术方案为:
6.一种直线电机系统的预设性能鲁棒运动控制方法,包括以下步骤:
7.步骤1、基于预设性能函数方法并引入障碍李亚普诺夫函数,建立直线电机系统的预设性能鲁棒运动控制输入信号如公式(14)所示:
[0008][0009]
公式(14)中,u为直线电机系统的预设性能鲁棒运动控制输入信号;m0为直线电机系统运动部分质量m的名义值;为待设计虚拟控制信号的一阶导数;控制输入信号设计参数e1为直线电机系统的位置跟踪误差;e2为辅助误差变量;μ为时变预设性能函数。
[0010]
步骤2、基于步骤1建立的预设性能鲁棒运动控制输入信号,控制直线电机系统工作。
[0011]
进一步的,步骤1过程如下:
[0012]
(1)、建立直线电机系统的运动方程如公式(1)所示:
[0013][0014]
公式(1)中,m为直线电机系统运动部分质量;y为系统运动部分位置,为y的一阶导数,为y的二阶导数;u为控制输入信号;f为摩擦力;d为系统受到的有界不确定性;k
v
为
粘性摩擦系数;k
c
为库仑摩擦系数;sign(
·
)表示符号函数;
[0015]
假设系统参数的不确定性满足以下关系:
[0016][0017]
公式(2)中,m0,k
v0
,k
c0
分别对应为直线电机系统运动部分质量m、粘性摩擦系数k
v
、粘性摩擦系数k
v
的名义值;δm,δk
v
,δk
c
分别表示对应参数的不确定部分;
[0018]
由于可以表示为:
[0019][0020]
公式(3)中,为不确定部分;
[0021]
根据公式(2)、(3)可将公式(1)可重写为:
[0022][0023]
公式(4)中,表示系统的总和扰动,且f=f0 δf,
[0024]
由于在实际系统中系统的控制输入信号为有界信号,故系统的总和扰动也有界,即满足关系:其中,为未知正常数;
[0025]
(2)、设计直线电机系统预设性能鲁棒运动控制输入信号:
[0026]
首先定义直线电机系统的位置跟踪误差如公式(5)所示:
[0027]
e1=y
‑
y
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5),
[0028]
公式(5)中,e1为系统的位置跟踪误差,y
d
为二阶可导的期望位置信号;
[0029]
定义辅助误差变量如公式(6)所示:
[0030][0031]
公式(6)中,e2为辅助误差变量,u0为待设计的虚拟控制输入信号;
[0032]
设计时变预设性能函数μ(t)如公式(7)所示:
[0033]
μ(t)=(μ0‑
μ
∞
)e
‑
kt
μ
∞
ꢀꢀꢀꢀꢀꢀꢀ
(7),
[0034]
公式(7)中,μ(t)为时变预设性能函数;μ0为预设性能函数μ(t)的初始值;μ
∞
为时变预设性能函数μ(t)的稳态值;k>0为与时变预设性能函数μ(t)衰减速度相关的参数,0<μ
∞
<μ0;
[0035]
设计障碍李亚普诺夫函数如公式(8)所示:
[0036][0037]
公式(8)中,v1为障碍李亚普诺夫函数;μ为时变预设性能函数。
[0038]
对公式(8)求导可得公式(9):
[0039][0040]
公式(9)中,为时变预设性能函数的一阶导数;为直线电机系统位置跟踪误差的一阶导数;为期望位置信号的一阶导数。
[0041]
由公式(9),虚拟控制输入信号u0可设计为:
[0042][0043]
公式(10)中,k1>0,
[0044]
将公式(10)代入公式(9)可得:
[0045][0046]
为了求得实际的控制输入信号需对公式(6)求导,并结合式(4)可得公式(12):
[0047][0048]
设计李亚普诺夫函数对李亚普诺夫函数进行求导可得:
[0049][0050]
由公式(13)设计预设性能鲁棒运动控制输入信号u为:
[0051][0052]
其中,u为直线电机系统的预设性能鲁棒运动控制输入信号;m0为直线电机系统运动部分质量m的名义值;为待设计虚拟控制信号的一阶导数;控制输入信号设计参数e1为直线电机系统的位置跟踪误差;e2为辅助误差变量;μ为时变预设性能函数。
[0053]
进一步的,直线电机系统受到的有界不确定性d至少包括系统未建模动态、外部扰动以及传感器的测量噪声。
[0054]
本发明采用引入障碍李亚普诺夫函数以及预设性能函数设计系统的鲁棒运动控制输入信号,不仅可以消除高频扰动对直线电机运动系统控制精度的影响,提高系统的鲁棒性,而且系统控制过程的暂态响应性能以及稳态控制精度都可以通过设计的性能函数预先设定。由此解决了直线电机系统中高频扰动信号不易有效估计的难题,并且在简化控制输入信号设计过程的同时也确保了对系统输出的高精度要求。
[0055]
与现有技术相比,本发明的优点为:
[0056]
(1)通过引入预设性能函数及障碍李亚普诺夫函数进行直线电机系统的运动控制信号设计,实现了系统控制过程中跟踪误差的暂态性能和稳态性能的预先设置。
[0057]
(2)在无需对系统不确定性进行估计的前提下仍可确保系统的输出性能满足高精度的控制要求。
[0058]
(3)控制算法实现简单,提高了控制输入信号的计算效率,确保控制的实时性。
附图说明
[0059]
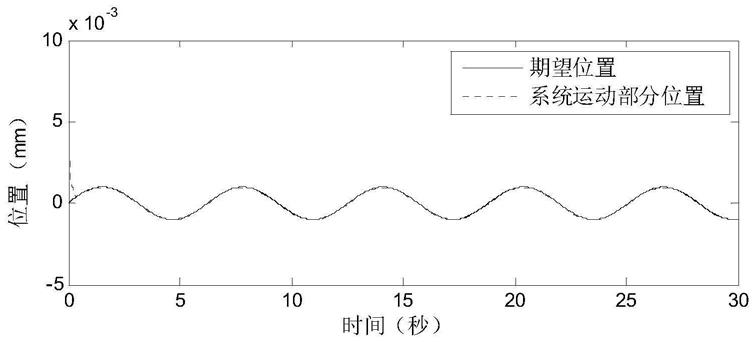
图1为本发明实施例情形1情况下系统运动部分位置对期望位置信号的跟踪情况示意图。
[0060]
图2为本发明实施例情形1情况下直线电机系统位置跟踪误差示意图。
[0061]
图3为本发明实施例情形2情况下系统运动部分位置对期望位置信号的跟踪情况示意图。
[0062]
图4为本发明实施例情形2情况下直线电机系统位置跟踪误差示意图。
[0063]
图5为本发明实施例情形1情况下所述控制方法控制输入信号示意图。
[0064]
图6为本发明实施例情形2情况下所述控制方法控制输入信号示意图。
[0065]
图7为本发明控制方法控制原理框图。
具体实施方式
[0066]
下面结合附图和实施例对本发明进一步说明。
[0067]
如图7所示,一种直线电机系统的预设性能鲁棒运动控制方法,包括以下步骤:
[0068]
s1,建立直线电机系统的运动方程,过程如下:
[0069]
s1.1直线电机系统的运动方程可描述为:
[0070][0071]
其中,m为直线电机系统运动部分质量;y为系统运动部分位置,为y的一阶导数,为y的二阶导数;u为控制输入信号;f为摩擦力;d为系统受到的有界不确定性;k
v
为粘性摩擦系数;k
c
为库仑摩擦系数;sign(
·
)表示符号函数。
[0072]
s1.2假设系统参数的不确定性满足以下关系:
[0073]
[0074]
其中,m0,k
v0
,k
c0
为对应参数的名义值;δm,δk
v
,δk
c
表示对应参数的不确定部分。
[0075]
由于可以表示为:
[0076][0077]
其中,为不确定部分。
[0078]
s1.3由式(2)、式(3),式(1)可重写为:
[0079][0080]
其中,表示系统的总和扰动,且f=f0 δf,由于在实际系统中系统的控制输入信号为有界信号,故系统的总和扰动也有界,即满足关系:其中,为未知正常数。
[0081]
s2,系统预设性能鲁棒运动控制输入信号设计,具体设计过程如下:
[0082]
s2.1定义系统的位置跟踪误差:
[0083]
e1=y
‑
y
d
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5),
[0084]
其中,e1为系统的位置跟踪误差;y
d
为二阶可导的期望位置信号。
[0085]
s2.2定义辅助误差变量:
[0086][0087]
其中,e2为辅助误差变量,u0为待设计的虚拟控制输入信号。
[0088]
s2.3设计时变预设性能函数μ(t)为:
[0089]
μ(t)=(μ0‑
μ
∞
)e
‑
kt
μ
∞
ꢀꢀꢀꢀꢀꢀꢀ
(7),
[0090]
其中,μ(t)为时变预设性能函数;μ0为预设性能函数μ(t)的初始值;μ
∞
为时变预设性能函数μ(t)的稳态值;k>0为与时变预设性能函数μ(t)衰减速度相关的参数,0<μ
∞
<μ0。
[0091]
s2.4设计障碍李亚普诺夫函数:
[0092][0093]
其中,v1为障碍李亚普诺夫函数;μ为时变预设性能函数。
[0094]
s2.5对式(8)求导可得:
[0095]
[0096]
公式(9)中,为时变预设性能函数的一阶导数;为直线电机系统位置跟踪误差的一阶导数;为期望位置信号的一阶导数。
[0097]
由式(9),虚拟控制输入信号u0可设计为:
[0098][0099]
其中,k1>0,
[0100]
s2.6将式(10)代入式(9)可得:
[0101][0102]
s2.7为了求得实际的控制输入信号需对式(6)求导,并结合式(4)可得:
[0103][0104]
s2.8设计李亚普诺夫函数对该函数进行求导可得:
[0105][0106]
由公式(13)设计预设性能鲁棒运动控制输入信号u为:
[0107][0108]
其中,u为直线电机系统的预设性能鲁棒运动控制输入信号;m0为直线电机系统运动部分质量m的名义值;为待设计虚拟控制信号的一阶导数;控制输入信号设计参数e1为直线电机系统的位置跟踪误差;e2为辅助误差变量;μ为时变预设性能函数。
[0109]
s2.9将式(14)代入式(13)可得:
[0110][0111]
进一步,可表示为:
[0112][0113]
其中,
[0114]
通过解不等式(16)可得:
[0115][0116]
s2.10因此,当t
→
∞时v2有界,故又由v2的定义可知v1有界。考虑到式(8)可得:
[0117][0118]
所以,由式(18)以及v1的有界性可知系统的位置跟踪误差e1将按照预设的性能变化,即e1可以取得预设的控制性能。
[0119]
为验证所述控制方法的有效性,下面将针对系统参数不确定性为两中情形下的控制性能进行仿真研究。情形1:δm=0.09m0,δk
v
=0.09k
v0
,δk
c
=0.09k
c0
;情形2:δm=0.18m0,δk
v
=0.18k
v0
,δk
c
=0.18k
c0
。
[0120]
直线电机系统相关物理参数:m0=6kg,k
v0
=10ns/m,k
c0
=13n;期望位置信号:y
d
=sin(t)(mm);系统运动部分初始位置为y(0)=10(mm),d=0.9 0.3cos(5t)。
[0121]
时变预设性能函数参数设计为:μ0=0.015,μ
∞
=0.001,k=4。控制信号参数设计为:k1=25,k2=17,k3=82。
[0122]
仿真研究结果如图1
‑
图6所示。图1为情形1情况下系统运动部分位置对期望位置信号的跟踪情况示意图;图2为情形1情况下直线电机系统位置跟踪误差示意图;图3为情形2情况下系统运动部分位置对期望位置信号的跟踪情况示意图;图4为情形2情况下直线电机系统位置跟踪误差示意图。由图1
‑
图4可见,在两种不同的情形下所述控制方法都可以实现高精度的位置跟踪控制,且跟踪误差的暂态性能及稳态性能符合预设的控制要求。图5、图6分别为两种不同情形下所述控制方法的控制输入信号示意图。
[0123]
本发明所述的实施例仅仅是对本发明的优选实施方式进行的描述,并非对本发明构思和范围进行限定,在不脱离本发明设计思想的前提下,本领域中工程技术人员对本发明的技术方案作出的各种变型和改进,均应落入本发明的保护范围,本发明请求保护的技术内容,已经全部记载在权利要求书中。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。