1.本发明属于电力设施巡检技术领域,具体涉及为地下电缆管道用巡检机器人。
背景技术:
2.电缆是电力输送系统中主要组成部分,为了城市美观,在市区内部,电缆多通过地下管路进行布线。有些地方的地下管路直径大,人员可以在里面行走,便于线路巡查。但有些地方的地下管路或电缆沟内部空间小,人员无法在里面行走,对线路进行巡检。尤其是电缆沟,电缆架设在电缆支架上,巡检时只能将电缆沟上面的盖板取下。
技术实现要素:
3.本发明要解决的技术问题是:克服现有技术的不足,提供一种地下电缆管道用巡检机器人,本发明可以在空中飞行,可以适用于电缆管道以及电缆沟,代替人工进行线路巡检,安全、高效。
4.本发明解决现有技术存在的问题所采用的技术方案是:
5.地下电缆管道用巡检机器人,包括壳体,所述的壳体两侧对称设有机翼,壳体前端设有摄像头、后端设有推进螺旋桨。
6.推进螺旋桨的中心轴穿设至壳体内部,壳体内部设有第一电机,第一电机输出轴带动中心轴旋转。
7.每个机翼上设有一个垂直布置的通孔,通孔内部设有升降螺旋桨,机翼上设有第二电机,第二电机带动升降螺旋桨旋转。
8.壳体内部设有电池以及控制器,第一电机、第二电机、摄像头以及电池均与控制器电性连接。
9.优选的,所述的壳体后端面设有水平布置的滑槽,中心轴设置于滑槽内部。
10.中心轴末端固定有第一皮带轮,第一电机输出轴末端设有第二皮带轮,第一皮带轮与第二皮带轮轴线平行布置于同一水平面上,第一皮带轮与第二皮带轮之间共同套设有第一同步带。
11.中心轴上套设有套管,套管圆周面两侧中至少一侧通过连接轴固定有齿轮,齿轮啮合连接有齿条,齿条一端与电缸的伸缩杆固定连接,电缸固定于壳体内部。
12.优选的,所述的第一同步带中间设有两个张紧轮,张紧轮圆周面与第一同步带内侧面接触。
13.张紧轮转轴一端固定有滑块,壳体内部设有滑道,滑块滑动设置于滑道内部。
14.两个滑块之间设有第一弹簧。
15.优选的,第二电机固定于机翼内部,第二电机外部同轴套设有第三皮带轮,第二电机与第三皮带轮顶面固定连接。
16.每个机翼上设有两个升降螺旋桨。
17.升降螺旋桨包括桨叶以及桨叶整体外部同轴套设的皮带轮,升降螺旋桨的皮带轮
与第三皮带轮之间共同套设有第二同步带。
18.优选的,升降螺旋桨的皮带轮上下两个端面中至少一个端面内凹有环状的凹槽,凹槽内部插设有卡环,卡环背离升降螺旋桨的一端与机翼内壁固定连接。
19.优选的,所述的壳体中间的形状为圆柱形、后端的形状为锥形,机翼与圆柱形的圆周面固定连接,滑槽位于壳体的锥形区域。
20.优选的,壳体的圆柱形区域中间设有上端敞口的电池仓以及电控仓,电池设置于电池仓内部,电池仓敞口处罩设有电池仓盖板,控制器设置于电控仓内部。
21.优选的,壳体前端固定有前端头,前端头前端上下两侧分别设有摄像头以及红外探头,前端头侧面设有灯。
22.灯以及红外探头均与控制器电性连接。
23.优选的,壳体圆柱形区域的后端设有上下两端均敞口布置的定位器放置腔,定位器放置腔内部叠放有若干个定位器。
24.壳体内部设有上下布置的两个转槽,转槽与定位器放置腔贯通连接,转槽与定位器放置腔贯通处位于定位器放置腔内部靠近下端出口的位置。
25.壳体内部位于定位器放置腔外部设有分隔器,所述的分隔器包括底层叶片、上层叶片、转轴以及转轴顶端固定的第四皮带轮。
26.底层叶片、上层叶片均包含有三个水平布置的叶片,相邻的两个叶片之间的夹角为120
°
,底层叶片与上层叶片之间的夹角为60
°
。
27.上层叶片位于底层叶片上方,底层叶片与上层叶片均与转轴同轴固定连接。
28.底层叶片与上层叶片分别转动设置于两个转槽内部。
29.当底层叶片所包含的一个叶片中心位于最下方定位器下方中心位置时,上层叶片所包括的两个叶片正好位于倒数第二个定位器的两侧。
30.分割器一侧设有第三电机,第三电机输出轴通过第三同步带带动分割器旋转,第三电机与控制器电性连接。
31.定位器放置腔上端敞口处罩设有盖板,盖板下方设有第二弹簧。
32.电缆管道内部的巡检方法,包括一下步骤:
33.a、启动升降螺旋桨,地下电缆管道用巡检机器人沿垂直通道下降到电缆管道内部,然后调整升降螺旋桨的转速,使其产生的升力与地下电缆管道用巡检机器人重力相同;
34.b、开启推进螺旋桨,推动地下电缆管道用巡检机器人前进;
35.c、转向时,开启电缸,齿条带动齿轮301旋转,进而使推进螺旋桨向左或向右摆动,使地下电缆管道用巡检机器人转向;
36.d、摄像头将电缆管道内部画面,通过控制器的远传模块传递到地面控制中心的显示器上,便于操作人员连接管道内部实际情况;
37.e、红外探头检测电缆管道内部各个区域的温度场情况,并将信号通过控制器的远传模块传递到地面控制中心的显示器上,便于操作人员连接管道内部温度场情况;
38.f、若操作人员发现电缆管道内部某个位置出现异常,需要后期人工排查或检修时,则通过远程控制,控制第三电机旋转,进而带动分割器转动,底层叶片旋转60
°
,解除对最下方定位器的支撑,定位器掉落到电缆管道内部,同时上层叶片旋转60
°
后,对倒数第二个定位器进行支撑,避免其同时掉落到电缆管道内部;
39.g、定位器通过呼吸灯、发射gps或北斗定位信号来进行位置的标记,便于维修人员准确的找到需要检修核查的位置。
40.与现有技术相比,本发明所具有的有益效果:
41.(1)移动时无需接触地面,因此适用于电缆管道、电缆沟内部进行电缆巡检。
42.(2)升降螺旋桨位于机翼内部,因此桨叶不会碰撞到电缆。
43.(3)依靠推进螺旋桨左右摆动进行转向,使得转向时壳体、摄像头能够一直保持水平状态,不会发生摄像头沿其轴向旋转的情况,便于工作人员观看影像。
44.(4)带有红外探头,可对电缆的温度场进行检查,通过温度场可获悉电缆的运行情况。
45.(5)可在有安全隐患的地方投放定位器,便于维修人员能够快速、准确的找到需要检修的位置。
附图说明
46.下面结合附图和实施例对本发明进一步说明。
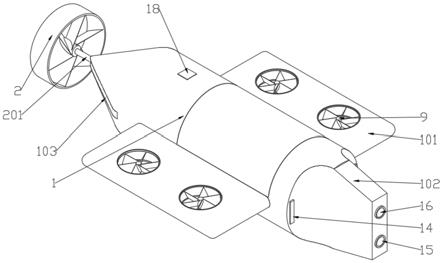
47.图1为本发明地下电缆管道用巡检机器人外形图,
48.图2为本发明地下电缆管道用巡检机器人局部分解图,
49.图3为本发明地下电缆管道用巡检机器人外壳局部剖视图,
50.图4为本发明地下电缆管道用巡检机器人径向第一剖视图,
51.图5为本发明地下电缆管道用巡检机器人径向第二剖视图,
52.图6为图5中a处局部放大图,
53.图7为本发明地下电缆管道用巡检机器人推进器结构图,
54.图8为本发明地下电缆管道用巡检机器人升降器结构图,
55.图9为本发明地下电缆管道用巡检机器人升降器第一剖视图,
56.图10为图9中b处局部放大图,
57.图11为本发明地下电缆管道用巡检机器人升降器第二剖视图,
58.图12为本发明地下电缆管道用巡检机器人定位器放置机构结构图,
59.图13为本发明地下电缆管道用巡检机器人分隔器外形图。
60.图中:1
‑
壳体、101
‑
机翼、102
‑
前端头、103
‑
滑槽、104
‑
电池仓盖板、105
‑
定位器放置腔、106
‑
转槽、107
‑
卡环、2
‑
推进螺旋桨、201
‑
中心轴、202
‑
第一皮带轮、3
‑
套管、301
‑
齿轮、4
‑
齿条、401
‑
电缸、5
‑
第一同步带、6
‑
第一电机、601
‑
第二皮带轮、7
‑
张紧轮、701
‑
滑块、8
‑
第一弹簧、9
‑
升降螺旋桨、10
‑
第二同步带、11
‑
第三皮带轮、1101
‑
第二电机、12
‑
电池、13
‑
控制器、14
‑
灯、15
‑
摄像头、16
‑
红外探头、17
‑
定位器、18
‑
盖板、19
‑
第二弹簧、20
‑
分隔器、2001
‑
底层叶片、2002
‑
上层叶片、2003
‑
转轴、2004
‑
第四皮带轮、21
‑
第三电机、22
‑
第三同步带。
具体实施方式
61.附图为该地下电缆管道用巡检机器人的最佳实施例,下面结合附图对本发明进一步详细的说明。
62.由附图1至附图2所示,地下电缆管道用巡检机器人,包括壳体1,所述的壳体1两侧
对称设有两个机翼101,壳体1前端设有摄像头15、后端设有推进螺旋桨2。
63.推进螺旋桨2包括环状的防护罩以及防护罩内部的若干个桨叶,桨叶位于防护罩中心的一端共同固定连接有中心轴201,推进螺旋桨2的中心轴201穿设至壳体1内部。
64.由附图3以及附图7所示,为了使推进螺旋桨2可以左右摆动,以便壳体1可以转向,所述的壳体1后端面设有水平布置的滑槽103。中心轴201设置于滑槽103内部,滑槽103左右两侧贯通布置,或滑槽103左右两侧的宽度满足中心轴201转动的需求,当中心轴201转动时不会产生干涉。
65.中心轴201末端固定有第一皮带轮202,第一电机6输出轴末端设有第二皮带轮601,第一皮带轮202与第二皮带轮601轴线平行布置于同一水平面上,第一皮带轮202与第二皮带轮601之间共同套设有第一同步带5。
66.中心轴201上套设有套管3,套管3圆周面两侧中至少一侧通过连接轴固定有齿轮301,齿轮301轴线与套管3轴线垂直相交。本实施例中,为了受力均与,套管3上下两侧各连接有一个齿轮301,两个齿轮301围绕套管3轴线对称布置。齿轮301啮合连接有齿条4,齿条4一端与电缸401的伸缩杆固定连接,电缸401固定于壳体1内部。
67.为了避免套管3沿其轴向发生窜动,中心轴201上位于套管3的两侧各凸设有一个卡环,套管3卡设于两个卡环之间。
68.拉动齿条4,使得套管3围绕齿轮301轴线旋转,进而带动中心轴201左右摆动。中心轴201左右摆动时,会使得第一同步带5松弛,第一电机6无法带动中心轴201旋转。为了避免第一同步带5松弛,所述的第一同步带5中间设有两个张紧轮7,张紧轮7圆周面与第一同步带5内侧面接触。张紧轮7转轴一端固定有滑块701,壳体1内部设有垂直的滑道,滑块701上下滑动设置于滑道内部,两个滑块701之间设有第一弹簧8,第一弹簧8同样垂直设置于滑道内部。依靠第一弹簧8的推力,两个张紧轮7始终顶着第一同步带5,使第一同步带5一直处于绷紧状态。
69.每个机翼101上设有至少一个垂直布置的通孔,通孔内部设有升降螺旋桨9,机翼101上设有第二电机1101,第二电机1101带动升降螺旋桨9旋转。
70.为了使壳体1更好的保持平衡,本实施例中每个机翼101上设有两个垂直布置的通孔,且两个机翼101上的通孔对称布置。
71.由附图8至附图11所示,第二电机1101固定于机翼101内部,第二电机1101外部同轴套设有第三皮带轮11,第三皮带轮11上端封闭、下端敞口,第二电机1101与第三皮带轮11顶面固定连接。
72.每个机翼101上设有两个升降螺旋桨9,升降螺旋桨9包括桨叶以及桨叶整体外部同轴套设的皮带轮,升降螺旋桨9的皮带轮与第三皮带轮11之间共同套设有第二同步带10。
73.为了避免升降螺旋桨9发生位移,升降螺旋桨9的皮带轮上下两个端面中至少一个端面内凹有环状的凹槽,凹槽内部插设有卡环107,凹槽与卡环107转动连接,卡环107背离升降螺旋桨9的一端与机翼101内壁固定连接。
74.为了降低飞行阻力,所述的壳体1中间的形状为圆柱形、后端的形状为锥形,机翼101与圆柱形的圆周面固定连接,滑槽103位于壳体1的锥形区域。
75.壳体1的圆柱形区域中间设有上端敞口的电池仓以及电控仓,电池仓与电控仓之间通过隔板隔开。电池12设置于电池仓内部,电池仓敞口处罩设有电池仓盖板104,控制器
13设置于电控仓内部。打开电池仓盖板104,就可更换电池12,便于快速更换电池。控制器13包括飞行控制模块、远传模块、信号接收模块、电源管理模块、gps或北斗定位模块,均采用现有技术,定位模块优选北斗导航定位模块。
76.控制器13与工作人员手持遥控器以及主控电脑进行无线连接,可将采集到的数据传递给遥控器以及主控电脑,或只传递给主控电脑。遥控器可通过控制器13控制机器人的飞行状态以及其他电气零部件工作。
77.第一电机6、第二电机1101、摄像头15以及电池12均与控制器13电性连接。
78.壳体1前端固定有前端头102,前端头102的水平截面形状为等腰梯形,前端头102前端上下两侧分别设有摄像头15以及红外探头16,前端头102侧面设有灯14。摄像头15以及红外探头16,以及其图像传送、处理模块均为先有技术。
79.灯14以及红外探头16均与控制器13电性连接。
80.当发现电缆某个部分存在安全隐患或出现外皮开裂现象时,后期需要维修人员进行现场排查、维修。为了便于维修人员快速、准确的找到位置。本实施例中,增加定位器投放功能。
81.由附图5、附图6、附图12、附图13所示,壳体1圆柱形区域的后端设有上下两端均敞口布置的定位器放置腔105,定位器放置腔105内部叠放有若干个定位器105,定位器105为现有技术,外形为长方体。
82.壳体1内部设有上下布置的两个转槽106,转槽106与定位器放置腔105贯通连接,转槽106与定位器放置腔105贯通处位于定位器放置腔105内部靠近下端出口的位置。
83.壳体1内部位于定位器放置腔105外部设有分隔器20,由附图13所示,所述的分隔器20包括底层叶片2001、上层叶片2002、转轴2003以及转轴2003顶端固定的第四皮带轮2004。
84.底层叶片2001、上层叶片2002均包含有三个水平布置的叶片,相邻的两个叶片之间的夹角为120
°
,底层叶片2001与上层叶片2002之间的夹角为60
°
,
85.上层叶片2002位于底层叶片2001上方,底层叶片2001与上层叶片2002均与转轴2003同轴固定连接。
86.底层叶片2001与上层叶片2002分别转动设置于两个转槽106内部。
87.当底层叶片2001所包含的一个叶片中心位于最下方定位器17下方中心位置时,上层叶片2002所包括的两个叶片正好位于倒数第二个定位器17的两侧。
88.分割器20一侧设有第三电机21,第三电机21输出轴通过第三同步带22带动分割器20旋转,第三电机21与控制器13电性连接,
89.定位器放置腔105上端敞口处罩设有盖板18,盖板18下方设有第二弹簧19。
90.电缆管道内部的巡检方法,包括一下步骤:
91.a、启动升降螺旋桨9,地下电缆管道用巡检机器人沿垂直通道下降到电缆管道内部,然后调整升降螺旋桨9的转速,使其产生的升力与地下电缆管道用巡检机器人重力相同;
92.b、开启推进螺旋桨2,推动地下电缆管道用巡检机器人前进;
93.c、转向时,开启电缸401,齿条4带动齿轮301旋转,进而使推进螺旋桨2向左或向右摆动,使地下电缆管道用巡检机器人转向;
94.d、摄像头15将电缆管道内部画面,通过控制器13的远传模块传递到地面控制中心的显示器上,便于操作人员连接管道内部实际情况;
95.e、红外探头16检测电缆管道内部各个区域的温度场情况,并将信号通过控制器13的远传模块传递到地面控制中心的显示器上,便于操作人员连接管道内部温度场情况;
96.f、若操作人员发现电缆管道内部某个位置出现异常,需要后期人工排查或检修时,则通过远程控制,控制第三电机21旋转,进而带动分割器20转动,底层叶片2001旋转60
°
,解除对最下方定位器105的支撑,定位器105掉落到电缆管道内部,同时上层叶片2001旋转60
°
后,对倒数第二个定位器105进行支撑,避免其同时掉落到电缆管道内部;
97.g、定位器105通过呼吸灯、发射gps或北斗定位信号来进行位置的标记,便于维修人员准确的找到需要检修核查的位置。
98.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于上述实施方式,在所属技术领域普通技术人员所具备的知识范围内,还可以在不脱离本发明宗旨的前提下作出各种变化。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。