1.本发明涉及化学发光检测设备的技术领域,尤其是涉及一种化学发光免疫分析仪的动态清洗站。
背景技术:
2.目前全自动化学发光免疫分析仪是用来测量血液或者其他液体中某种特定化学成分的仪器,该分析仪把分析过程中的取样、加试剂、清洗等步骤通过自动化完成,目前在各级医院、防疫站得到广泛使用。
3.现有的化学发光免疫分析仪需要反复发生多次实验,为了提高分析仪的使用精度,分析仪中使用过的各种反应杯都要进行多次清洗,分析仪实际使用过程中,操作人员需要在反应杯中放入适量磁珠,操作人员利用免疫磁性颗粒(磁珠)来筛选和分离在食品、临床、土壤以环境中的微生物、细胞、化学元素等目标的方法得到越来越多的肯定,由于免疫磁珠分离/筛选方法的快速、高浓缩比、对设备要求简单等优点,在实际中应用非常广。
4.上述中的现有技术方案存在以下缺陷:但是现有的清洗站对反应杯的清洗不充分,清洗效果较差,从而会导致影响后续的检测结果准确度,同时清洗效率较低,影响整体的检测工作效率。
技术实现要素:
5.本发明的目的是提供一种化学发光免疫分析仪的动态清洗站,其具有提高分析仪检测精度的作用。
6.为实现上述目的,本发明提供了如下技术方案:一种化学发光免疫分析仪的动态清洗站,包括清洗平台,所述清洗平台上设置有拾取反应杯的拾取区和清洗反应杯的清洁区,所述清洁区设置有清洗反应杯的清洁装置,所述清洗平台上设置有将拾取区反应杯运往清洁区的运输装置;所述清洁装置包括向反应杯内注入清洗液的清洗针组件和带动反应杯内磁珠移动的磁吸附组件,所述清洗平台上设置有检测运输装置内反应杯位置的检测装置,所述检测装置上电性连接有单片机;所述清洗平台上设置有带动清洗针组件上下移动的竖直驱动源,所述清洗针组件包括向反应杯中灌注液体的注液泵和从反应杯中吸出液体的吸液泵,所述清洗平台上设置有控制磁吸附组件工作的吸附驱动源,所述运输装置包括带动反应杯工作的运输驱动源,所述单片机分别电性连接在竖直驱动源、注液泵、吸液泵、吸附驱动源和运输驱动源上。
7.通过采用上述技术方案,化学发光免疫分析仪中的反应杯内物质充分反应后,通过机械臂放置在拾取区,然后通过运输装置将反应杯运输至清洁区,然后通过清洗针组件向反应杯中倒入清洗液,再启动磁吸附组件带动反应杯中的磁珠在反应杯中来回震荡,从而起到在充分清洗反应杯中的杂物的作用,进而起到提高分析仪检测精度的作用。
8.进一步地,所述清洁区和拾取区之间形成用运输区,所述运输装置包括设置在运输区长度方向两端的运输轮,所述运输轮外侧套设运输皮带,所述运输皮带和运输轮呈啮
合设置,所述运输皮带的运行轨迹经过运输区和拾取区,所述运输皮带外侧壁均匀布置有若干反应杯支撑板,所述反应杯支撑板内开设有供反应杯放置的放置孔,所述运输驱动源固定连接在运输轮上。
9.通过采用上述技术方案,操作人员需要清洗分析仪中的反应杯时,只要通过机械臂将使用后的反应杯放置到拾取区的放置孔内,然后启动运输驱动源,运输驱动源带动运输轮转动,运输轮带动运输皮带转动,运输皮带将带有反应杯的反应杯支撑板移动只清洁区进行清洗即可,清洗完成后反应杯跟随运输皮带转回到拾取区,待操作人员将清洗完的反应杯取出即可,从而起到方便操作人员将拾取区的杯子运到清洁区的作用。
10.进一步地,所述清洗针组件包括固定清洁区的竖直板,所述竖直板沿其高度方向滑动设置同步板,所述同步板上设置有若干伸入反应杯的灌注针管,所述灌注针管内穿设置有吸出反应杯内液体的吸出针管,吸出针管靠近反应杯的一端伸出灌注针管,所述灌注针管远离反应杯的一端连接在注液泵上,所述吸出针管远离反应杯的一端连接在吸出泵上。
11.通过采用上述技术方案,待清洗的杯子进入到清洁区后,启动清洗针组件中吸出针管,吸出针管会插入到的待清洗的反应杯中,吸出反应杯中的残余液体,然后通过灌注针管向反应杯中加入清洗液,待杯中磁珠震荡过后,再通过吸出针管吸出反应杯中的液体,再通过灌注针管向反应杯中灌注清洗液,最后通过吸出针管抽出反应杯中清洗后的清洗液即可,如此一来往复冲刷反应杯中,从而起到提高反应杯清洁效果的作用。
12.进一步地,所述运输皮带外侧壁对应清洗针组件设置有若干灌注杯位支撑板,所述灌注杯位支撑板设置在相邻反应杯支撑板之间,所述灌注杯位支撑板内设置有若干灌注杯。
13.通过采用上述技术方案,清洗针组件在开机时,由于灌注针管一段时间内没使用,灌注针管内会镂空一端距离,这样会严重影响第一次清洗液的灌注计量,从而影响个别反应杯的清洗效果,灌注杯就是在开机之初,灌注针管先插入到灌注杯中,然后向灌注杯内灌注清洗液,此时灌注针管内的液体充盈,然后再用液体充盈的灌注针管向待清洗的反应杯内灌入清洗液,就可以保证灌注针此时灌注清洗液计量的稳定性,从而起到提高每个反应杯清洁效果的作用。
14.进一步地,所述竖直板靠近同步板的一面滑动设置有滑动块,所述滑动块沿竖直板的高度方向滑动设置,所述滑动块固定连接在同步板上,所述竖直板靠近同步板的一面设置有带动滑动块上下移动的滑动皮带,所述滑动皮带连接在竖直驱动源上。
15.通过采用上述技术方案,操作人员需要将灌注针管从反应杯中拔出上,只要启动竖直驱动源,竖直驱动源带动滑动块在竖直板上向上移动,滑动块带动灌注针管从反应杯中拔出即可,需要将灌注针管插入到的反应杯中时,只要启动滑动块带动灌注针管向下移动即可。
16.进一步地,所述磁吸附组件包括滑动设置在清洗平台上的吸附板,所述吸附板长度方向的两端固定设置有吸附磁铁,所述吸附磁铁设置在反应杯的两侧,所述清洗平台上设置有带动吸附板往返移动的吸附皮带,所述吸附皮带连接在吸附驱动源上。
17.通过采用上述技术方案,反应杯中加入清洗液后,吸附板在吸附驱动源的作用下在清洗平台上往复运动,吸附板带动两端的吸附磁铁在反应杯的两侧线性往复运动,当吸
附磁铁靠近反应杯时,反应杯内的磁珠会被吸附在反应杯壁上,当两个磁铁均远离反应杯时,反应杯的中的磁珠会落入在充满清洗液的反应杯中,由于反应杯两侧都设置了吸附磁铁,相较于一个吸附磁铁,反应杯中的磁铁被吸附的周期缩短,吸附次数变多,反应杯中的磁珠往复震动次数变多,从而起到进一步提高反应杯清洗效果的作用。
18.进一步地,所述检测装置包括设置拾取区长度方向一端的第一光耦传感器,所述第一光耦传感器对应反应杯的运动轨迹设置,所述第一光耦传感器之间形成有供反应杯穿过的经过槽,所述第一光耦传感器上设置有检测反应杯支撑板的第二光耦传感器。
19.通过采用上述技术方案,通过第一光耦传感器和第二光耦传感器,一旦有反应杯支撑板和反应杯检测到,第一光耦传感器和第二光耦传感器同时将型号传递给单片机,由于第一光耦传感器和第二光耦传感器到清洁区的距离一定的,单片机就会好根据运输皮带移动速度和规律,当反应杯支撑板上的反应杯进入到清洁区后,启动清洗针组件和磁吸附组件及时清洗反应杯,通过第一光耦传感器和第二光耦传感器取代人为观察,从而起到提高反应杯清洗效率的作用。
20.进一步地,所述拾取区远离第一光耦传感器的一端设置有检测清洁后反应杯的最终光耦传感器。
21.通过采用上述技术方案,经过第一光耦传感器和第二光耦传感器的反应杯在清洁区清洗完成后,会跟随运输皮带回到拾取区,当最终光耦传感器检测到从清洁区出来的反应杯后,最终光耦传感器的信号传递给单片机,单片机会控制机械臂拾取被清洗完的反应杯。
22.进一步地,所述第一光耦传感器和最终光耦传感器之间设置有复位光耦传感器,所述运输皮带远离灌注杯位支撑板的一面设置有触发复位光耦传感器的触发板。
23.通过采用上述技术方案,开机后为了使灌注杯位于灌注针管下方,开机后运输皮带会先自行转动,直到复位光耦检测到触发板,才会停止运输皮带,等待反应杯的放入。
24.综上所述,本发明的有益技术效果为:1、采用了运输装置、清洗针组件和磁吸附组件,从而产生提高反应杯清洗效果的作用;2、采用了竖直板、同步板、灌注针管和吸出针管,从而产生清洁反应杯的效果;3、采用了运输轮、运输皮带、反应杯支撑板和放置孔,从而产生带动反应在清洁区和拾取区之间移动效果。
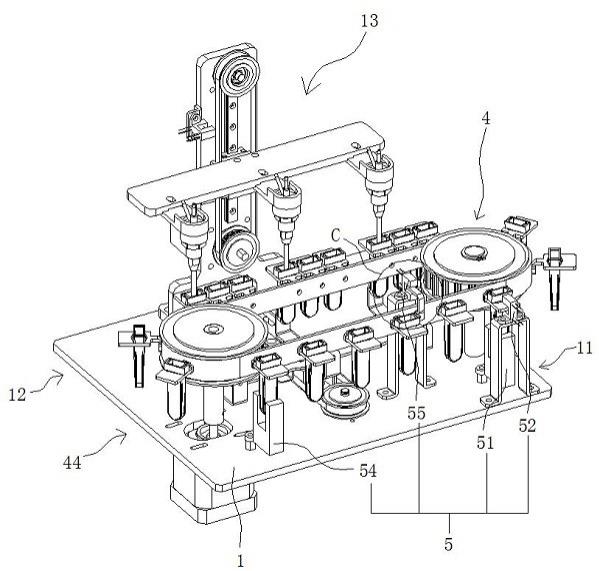
附图说明
25.图1为本发明的整体结构示意图;图2为本发明中的工作流程示意图;图3为本发明中的运输装置的结构示意图;图4为图3中a部的放大结构示意图;图5为本发明中磁吸附组件处的结构示意图;图6为本发明中清洗针组件处的结构示意图;图7为图6中b部的放大结构示意图;图8为图1中c部的放大结构示意图。
26.图中,1、清洗平台;11、拾取区;12、清洁区;13、清洁装置;2、磁吸附组件;21、吸附板;22、吸附磁铁;23、吸附皮带;3、清洗针组件;31、竖直板;32、同步板;33、灌注针管;34、吸出针管;35、滑动块;36、滑动皮带;37、灌注杯;4、运输装置;41、竖直驱动源;42、吸附驱动源;43、运输驱动源;44、运输区;45、运输轮;46、运输皮带;47、反应杯支撑板;48、放置孔;49、灌注杯位支撑板;5、检测装置;51、第一光耦传感器;52、第二光耦传感器;54、最终光耦传感器;55、复位光耦传感器;56、触发板。
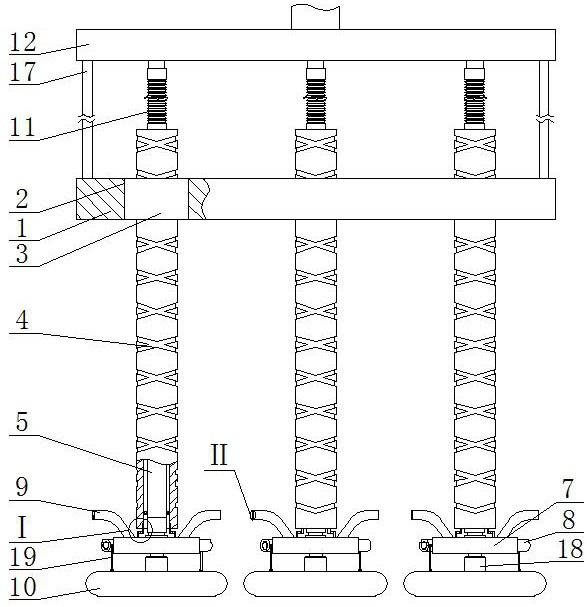
具体实施方式
27.以下结合附图对本发明作进一步详细说明。
28.参照图1和图3,为本发明公开的一种化学发光免疫分析仪的动态清洗站,包括方型的清洗平台1,清洗平台1宽度方向的一侧为供反应杯放置的拾取区11,清洗平台1宽度方向的另一侧为清洗反应杯的清洁区12,清洁区12和拾取区11之间形成有运输区44,清洁区12设置清洁反应杯的清洁装置13,运输区44设置将拾取区11反应杯运输至清洁区12的运输装置4,运输装置4包括转动设置在运输区44长度方向两端的运输轮45,运输轮45上套设有运输皮带46,运输皮带46和运输轮45呈啮合设置,运输皮带46上均部有若干反应杯支撑板47,待清洗的反应杯放置在反应杯支撑板47内,清洗平台1远离运输轮45的一面设置有带动运输轮45转动的运输驱动源43,本发明中的运输驱动源43为伺服电机。
29.参照图1和图2,拾取区11设置有检测运输装置4上反应杯位置的检测装置5,检测装置5包括设置在拾取区11长度方向一端的第一光耦传感器51,第一光耦传感器51开设用供反应杯穿过的经过槽,第一光耦传感器51的相同位置上设置有检测反应杯支撑板47的第二光耦传感器52,拾取区11长度方向的另一端设置有检测清洗后反应杯的最终光耦传感器54,最终光耦传感器54和第一光耦传感器51之间设置有复位光耦传感器55,第一光耦传感器51、第二光耦传感器52、最终光耦传感器54和复位光耦传感器55均电性连接在单片机上,参照图1、图2和图3,化学发光免疫分析仪中的反应杯使用之后,通过机械臂放置在拾取区11,拾取区11的反应杯反应杯支撑板47内,运输驱动源43启动带动运输皮带46转动,运输皮带46通过反应杯支撑板47带动反应杯向清洁区12移动,反应杯移动到清洁区12后,清洁装置13会对反应杯进行清洗,清洗后的反应杯会继续跟随运输皮带46移动来到个拾取区11即可完成反应杯清洗,整个过程中反应杯和反应杯支撑板47均在第一光耦传感器51、第二光耦传感器52、最终光耦传感器54和复位光耦传感器55均电性连接在单片机上监控下,然后第一光耦传感器51、第二光耦传感器52、最终光耦传感器54和复位光耦传感器55均电性连接在单片机上,将采集到的信息反馈给单片机,单片机根据不同信息反馈控制运输装置4和清洁装置13的运行。
30.参照图3和图4,反应杯支撑板47上开设有放置孔48,反应杯放置在放置孔48内,操作人员需要通过运输皮带46运输反应杯时,只要将反应杯放置在放置孔48内即可。
31.参照图5和图6,清洁装置13包括向反应杯内灌注清洗液的清洗针组件3和带动反应杯内磁珠震荡的磁吸附组件2,清洗针组件3包括固定在清洁区12的竖直板31,竖直板31上滑动设置滑动块35,滑动块35沿竖直板31的高度方向滑动设置,滑动块35上设置同步板32,同步板32沿其长度方向均布有三根插入反应杯的灌注针管33,灌注针管33内穿设有吸出针管34;待清洗的杯子进入到清洁区12后,启动清洗针组件3中吸出针管34,吸出针管34
会插入到的待清洗的反应杯中,吸出反应杯中的残余液体,然后通过灌注针管33向反应杯中加入清洗液,待杯中磁珠震荡过后,再通过吸出针管34吸出反应杯中的液体,再通过灌注针管33向反应杯中灌注清洗液,最后通过吸出针管34抽出反应杯中清洗后的清洗液即可,由于灌注针管33设置了三个,所以每个反应杯都要经过三次冲洗。
32.参照图5和图6,磁吸附组件2包括设置滑动设置在清洗平台1上的吸附板21,吸附板21长度方的两端均设置有吸附磁珠的吸附磁铁22,吸附磁铁22位于反应杯的两侧,吸附板21对应灌注针管33设置有三个,清洗平台1上设置有带动吸附板21往复移动的吸附皮带23,清洗平台1下方设置有带动吸附皮带23移动的吸附驱动源42,本发明中的吸附驱动源42为伺服电机,当反应杯位于灌注针管33下时,吸附磁铁22在吸附皮带23的作用下先要将磁珠吸附在反应杯侧壁上,然后吸出针管34吸出反应杯中内的液体,当灌注针管33向反应杯中加入清洗液时,吸附磁铁22往复靠近反应杯,磁珠跟随吸附磁铁22在反应杯中震荡清洗。
33.参照图5和图6,竖直板31上设置有带动滑动块35上下移动的滑动皮带36,竖直板31上设置有带动滑动皮带36转动的竖直驱动源41,当反应杯需要移动时,驱动竖直驱动源41将灌注针管33向上拉起即可,当反应杯需要灌注清洗液时,启动竖直驱动源41将灌注针管33向下移动插入反应杯即可,本发明中的竖直驱动源41为伺服电机。
34.参照图5和图6,灌注针管33长时间不使用,会导致灌注针管33内出现中空状态,从而会导致灌注针管33内泵出的清洗液剂量出现偏差,为了解决上述情况,在运输皮带46上相邻反应杯支撑板47之间设置灌注杯位支撑板49,灌注杯位支撑板49设置有三个,灌注杯位支撑板49内放置有灌注杯37,每次机器刚启动运输装置4会将灌注杯37移动到三根灌注针管33下,然后将灌注针管33插入到灌注杯37中,先进行一次打液,如此一来灌注针管33工作前不会有中空的空间,提高灌注针管33清洗液注入量。
35.参照图7,吸出针管34穿设在灌注针管33内,吸出针管34伸出在灌注针管33外,灌注针管33一端设置有连通灌注针管33的注液泵和连通吸出针管34的吸液泵。
36.参照图8,运输皮带46上设置有触发复位传感器的触发板56,当本发明中的设备开机时,运输装置4会先带动运输皮带46运行,当触发板56触发复位传感器时,此时灌注杯37已经进入清洁区12,由于相邻反应杯支撑板47之间为一个杯位,触犯传感器杯触发后,运输皮带46会转动半个杯位,保证灌注针管33对准灌注杯37即可。
37.本实施例的实施原理为:单片机分别电信连接有竖直驱动源41、吸附驱动源42、运输驱动源43、注液泵和吸液泵,本发明中的设备开机后,运输皮带46会根据复位传感器的信号将灌注杯37放置在灌注针管33下,待灌注针管33内排完空气后,单片机根据第二光耦传感器52带动运输皮带46继续转动,直到反应杯支撑板47位于第二光耦传感器52内即可,然后机械臂将使用过的反应杯放置在第一光耦传感器51对应的反应杯支撑板47上,第一光耦传感器51和第二光耦穿感器,同时检测到信号反馈给单片机,此时单片机会控制竖直驱动源41、吸附驱动源42、运输驱动源43、注液泵和吸液泵工作,为了进一步提高注液泵清洗灌注量,使三根灌注针管33同时连接在一个注液泵上,然后灌注针管33上均连接电磁阀,通过控制电磁阀的开合控制灌注针管33的最终出液,反应杯在运输皮带46上的运行的过程中完成清洗过程,反应杯最后在拾取区11被最终光耦传感器54检测到,然后通过机械臂将反应取出即可,如果整个设备发生突发停电情况,开机后运输皮带46会自动运行一周,此过程中凡是被最终光耦传感器54检测到反应杯,都会被机械手取出,防止出现反应杯漏洗或者多
次清洗的作用。
38.本具体实施方式的实施例均为本发明的较佳实施例,并非依此限制本发明的保护范围,故:凡依本发明的结构、形状、原理所做的等效变化,均应涵盖于本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。