1.本公开内容涉及车辆定位,特别地但不排他地涉及横向车辆定位。本发明的各方面涉及控制系统、车辆和方法。
背景技术:
2.车辆定位涉及车辆当前位置的识别,并且在诸如辅助车辆控制或自主车辆控制的领域中找到特定效用。识别车辆相对于其正在行驶的道路的横向位置可能特别重要。在某些情况下,这种横向定位可以包括车道检测、在车道内的定位和车道编号分配处理。
3.一些应对横向定位挑战的现有方法使用一个或更多个面向前方的传感器以检测车道标记或车辆,并且通过为其分配车道编号来定位车道内和道路内的主车辆。然后使用该数据来计算主/本车辆的路径。
4.存在其中从这样的传感器可获得的信息可能降级的许多情况。这种信息丢失可能是传感器故障或外部条件的某些方面的结果。例如,主车辆前方的车道标记可能已经褪色或被其他对象(例如主车辆前方的车辆)遮挡。在这种情况下的一种方法是根据过去的数据估计相关的定位属性(例如车道曲率),但这可能意味着时间延迟,因为需要生成这样的历史。替选地,主车辆可以选择跟随前方车辆的路径,但这可能会将前方车辆控制中的错误传播至主车辆。
5.在面向前方的传感器根本不提供数据的情况下,问题可能更加严重。传感器可能实际上被致盲(例如,摄像装置由于阳光而被致盲或激光雷达传感器由于灰尘堆积而被致盲),或者可能出现技术故障(传感器本身或电力供应)。
6.本发明的目的是解决与现有技术相关联的一个或更多个缺点。
技术实现要素:
7.本发明的各方面和实施方式提供了如所附权利要求中所要求保护的控制系统、车辆和方法。
8.根据本发明的一方面,提供了一种用于主车辆的控制系统,主车辆包括相对于主车辆以第一取向设置的一级传感器装置和至少一个附加传感器装置,每个附加传感器装置相对于主车辆以与第一取向不同的取向设置,控制系统被配置成:从一级传感器装置接收一级传感器信息;从每个附加传感器装置接收附加传感器信息;在一级传感器信息的全部或部分被中断(interrupt)的情况下使用附加传感器信息确定车辆相对于道路的横向位置;以及根据所确定的横向位置提供输出。
9.根据本发明的另一方面,提供了一种车辆,该车辆包括控制系统、一级传感器装置和附加传感器装置。
10.根据本发明的另一方面,提供了一种用于估计主车辆的横向位置的方法,主车辆包括相对于主车辆以第一取向设置的一级传感器装置和至少一个附加传感器装置,每个附加传感器装置相对于主车辆以与第一取向不同的取向设置,该方法包括在控制系统处:从
一级传感器装置接收一级传感器信息;从每个附加传感器装置接收附加传感器信息;在一级传感器信息的全部或部分被中断的情况下使用附加传感器信息确定车辆相对于道路的横向位置;以及根据所确定的横向位置提供输出。还可以提供一种包括计算机可读指令的非暂态计算机可读介质,该计算机可读指令在由处理器执行时使得执行该方法。
11.这些方面可以在一级传感器装置不能提供全部或部分所需的传感器信息的情况下利用来自与一级传感器装置不同取向的附加传感器装置的信息来计算主车辆的横向位置。在一级传感器装置的一个或更多个传感器未最佳运行的情况下,例如由于外部条件或传感器故障而未最佳运行的情况下,这可以特别地改进横向定位。由于附加传感器装置不与一级传感器装置定向在同一方向上,因此影响一级传感器装置的问题也不太可能反映在来自附加传感器装置的数据中。
12.在一些实施方式中,一个或更多个控制器共同包括:至少一个电子处理器,其具有用于接收信号的电输入端;以及至少一个电子存储设备,其电耦接至该至少一个电子处理器并且在其中存储有指令;并且其中,该至少一个电子处理器被配置成访问该至少一个存储设备并且执行在其上的指令以使控制系统:从一级传感器装置接收一级传感器信息;从每个附加传感器装置接收次级传感器信息;在一级传感器信息的全部或部分被中断的情况下使用附加传感器信息确定车辆相对于道路的横向位置;以及根据所确定的横向位置提供输出。
13.在实施方式中,控制系统包括一个或更多个控制器,一级传感器装置包括以第一取向排列的一个或更多个传感器,并且每个附加传感器装置包括以与第一取向不同的取向排列的一个或更多个传感器。在一些实施方式中,给定的附加传感器装置中的所有传感器以相同的取向排列。
14.在一些实施方式中,控制系统还被配置成:在一级传感器信息可用的情况下,根据附加传感器信息结合一级传感器信息确定车辆相对于道路的横向位置。与单独使用一级传感器信息相比,这可以改进车辆的横向位置的计算。在其他实施方式中,在一级传感器信息可用的情况下,控制系统可以单独使用一级传感器信息来计算横向位置。
15.可选地,至少一个附加传感器装置以与第一取向相反的取向设置。例如,第一取向可以相对于主车辆面向前方。在这种情况下,至少一个附加传感器装置可以相对于车辆面向后方。
16.可选地,控制系统的输出是用于控制主车辆的位置的控制输出。替选地或附加地,输出可以被提供给人机界面(hmi)。例如,输出可以提供传感器装置的功能性的指示,并且hmi可以在一个或更多个传感器装置没有充分发挥作用的情况下提供一个或更多个传感器装置需要维修的指示。
17.在一些实施方式中,主车辆包括至少两个附加传感器装置。可选地,至少一个附加传感器装置相对于车辆面向左侧,并且至少一个附加传感器装置相对于车辆面向右侧。
18.可选地,控制系统被配置成确定主车辆相对于道路的一个或更多个车道的位置。例如,控制系统可以确定车辆位于道路的哪个车道上以及/或者可以确定车辆在道路车道内的位置。
19.可选地,控制系统被配置成通过估计一个或更多个环境要素的曲率来确定车辆的横向位置。例如,一个或更多个环境要素包括车道标记。这样的要素可以存在于一级传感器
装置和次级传感器装置两者的视野中,这意味着可以通过参考一级传感器装置和附加传感器装置两者来改进诸如车道的特征的插值。
20.在一些实施方式中,控制系统还被配置成接收描述主车辆的环境的地图信息,并且其中,控制系统被配置成根据地图信息确定车辆在路线上的横向位置。地图信息可以与一级传感器信息和次级传感器信息结合使用。
21.可选地,上述传感器装置中的至少一者包括多个传感器。可选地,上述传感器装置中的至少一者包括激光雷达传感器。可选地,上述传感器装置中的至少一者包括摄像装置。例如,在一些实施方式中,上述传感器装置中的至少一者可以包括摄像装置和激光雷达传感器。
22.可选地,车辆包括为各传感器装置内的一级传感器和次级传感器提供的独立电力供应。因此,单个电力供应的故障不会阻止横向位置的确定。在一些实施方式中,控制系统包括多个接口元件,每个接口元件通信地耦接至各传感器装置内的一级传感器和次级传感器。同样,这可以提供冗余。
23.在本技术的范围内,明确地旨在,在前面段落中、在权利要求中和/或在以下描述和附图中阐述的各个方面、实施方式、示例和替选方案以及特别是其各个特征可以被独立地采用或者以任意组合采用。即,所有实施方式和/或任何实施方式的特征可以以任何方式和/或组合进行组合,除非这些特征不兼容。申请人保留更改任何原始提交的权利要求或相应地提交任何新权利要求的权利,包括将任何原始提交的权利要求修改成从属于任何其他权利要求和/或并入任何其他权利要求的任何特征的权利,尽管最初未以这种方式要求保护。
附图说明
24.现在将参照附图,仅通过示例的方式描述本发明的一个或更多个实施方式,在附图中:
25.图1示出了根据本发明的实施方式的车辆;
26.图2示出了图1的车辆的示意性表示,示出了用于车辆定位的元件;
27.图3示出了车辆的传感器的示例性垂直视野;
28.图4示出了传感器的示例性水平视野;
29.图5示出了道路上有其他车辆时的视野;
30.图6示出了根据本发明的实施方式的用于估计主车辆的横向位置的方法的流程图;
31.图7示出了弯曲道路上的视野;
32.图8示出了水平视野的一组替选示例;以及
33.图9示出了在道路车道合并的场景下图8的视野。
具体实施方式
34.本文参照附图1和附图2描述了根据本发明的实施方式的车辆100。
35.参照图2,车辆100包括控制系统200。车辆还包括一级传感器装置210和一个或更多个附加传感器装置220。一级传感器装置210和每个附加传感器装置220通信地耦接至控
制系统200。可以提供传感器装置210、220与控制系统200之间的有线或无线连接以实现这种通信。
36.如上所述,传感器装置210、220按取向分组。然而,替选地,每个装置内的传感器的控制和供电可以被分组。例如,在每个传感器装置210、220内,可以提供一级传感器系统的一个或更多个一级传感器和次级传感器系统的一个或更多个次级传感器。
37.该车辆还包括一级电力供应212和一个或更多个次级电力供应222。一级电力供应212耦接至传感器装置210、220内的作为一级传感器系统的一部分的传感器,以向其提供电力。类似地,一个或更多个次级电力供应222耦接至传感器装置210、220内的作为次级传感器系统的一部分的传感器,以向其提供电力。由于次级传感器系统的传感器不依赖于与一级传感器系统相同的电力供应,因此减少了两个传感器系统同时失去电力的机会。
38.可以使用一个或更多个处理器来实现控制系统200。控制系统还可以包括数据存储装置。所示实施方式的控制系统200包括接口202、204,以促使与一级传感器系统的传感器和次级传感器系统的传感器的通信。因此,为一级传感器系统的传感器和次级传感器系统的传感器提供了单独的网络连接。这可以降低从两个传感器系统到控制系统200的数据同时丢失的风险。
39.控制系统200被配置成从传感器装置210、220接收数据,并且对该数据进行处理以确定车辆100的定位,例如横向定位。特别地,控制系统200可以确定车辆100在道路上的横向位置。控制系统200可以利用该确定的输出来控制车辆100以及/或者通过人机界面(hmi)向车辆100的乘员提供反馈。在适当的情况下,控制系统200还可以向一个或更多个远程服务器提供信息。
40.在图2所示的实施方式中,一级传感器装置210和每个附加传感器装置均包括多个传感器。特别地,每个传感器装置210、220至少包括摄像装置和一个或更多个激光雷达传感器。例如,每个传感器装置的摄像装置可以用于一级传感器系统的传感器,而激光雷达传感器可以用于次级传感器系统的传感器。
41.一级传感器装置210具有第一取向。在优选实施方式中,该取向是面向前方的。也就是说,一级传感器装置210的传感器是面向前方的。因此,一级传感器装置210的传感器具有以车辆通常行驶方向为中心的视野。
42.每个附加传感器装置220具有与第一取向不同的取向。因此,附加传感器装置220中的传感器的取向与一级传感器装置210的取向不同。例如,在图2中,示出的附加传感器装置220是面向后方的,并且因此该附加传感器装置220的传感器的视野以与车辆100的通常行驶方向相反的方向为中心。
43.可以采用传感器装置210、220的替选相对取向。然而,一般而言,每个附加传感器装置220的取向与一级传感器装置210的第一取向基本不同。例如,每个附加传感器装置220的取向可以与第一取向成至少45度、优选地至少90度的角度。这可以确保附加传感器装置220的传感器与一级传感器装置210的等效传感器具有基本不同的视野。
44.这可以参照图3和图4进一步理解,图3和图4示出了图2所示的车辆100的面向前方的一级传感器装置210和面向后方的附加传感器装置220内的传感器的视野的侧视图和平面图。每个传感器装置包括安装在车辆顶部附近的摄像装置传感器和安装在保险杠中的激光雷达传感器。在空间上移位传感器可以降低两种传感器在同一情况下被阻塞或损坏的可
能性。从图4中可以看出,例如,激光雷达传感器可能具有比摄像装置传感器更宽的视野。如图5所示,这在其他车辆非常靠近主车辆100的情况下可能是特别有益的,这是因为例如车道标记对于摄像装置传感器来说可能是不清楚的。
45.在使用中,控制系统200可以执行图6所示的方法600。方法600是用于估计主车辆100的横向位置的方法,主车辆包括以相对于主车辆100的第一取向设置的一级传感器装置210和以相对于主车辆100的与第一取向不同的取向设置的至少一个附加传感器装置220。
46.该方法包括从一级传感器装置210接收610一级传感器信息以及从附加传感器装置220接收620附加传感器信息。然后,控制系统根据该传感器信息确定630车辆100的横向位置,特别地通过利用附加传感器信息修改单独根据一级传感器信息导出的在道路上的横向位置的估计。在全部或部分一级传感器信息不可用(例如,由于一级传感器装置210内的一个或更多个传感器的故障而不可用)的情况下,横向位置可以根据附加传感器信息连同来自一级传感器装置210的任何剩余传感器信息来确定。该方法然后包括控制系统200根据所确定的横向位置提供640输出。可选地,该方法还可以包括根据输出控制650车辆100。如前所述,该方法可以替选地或附加地包括根据输出通过人机界面(hmi)向车辆100的乘员提供反馈。在适当的情况下,控制系统200还可以向一个或更多个远程服务器提供信息。
47.为了确定车辆相对于道路的横向位置,控制系统200连续地确定传感器装置210、220可见的车道标记的曲率。从图7中可以看出,即使在所有传感器都正常工作的情况下,也可能存在从面向前方的一级传感器装置210导出的关于车道标记的有限信息。为了减轻对仅从一级传感器信息导出的曲率估计的这种限制,来自附加传感器信息的车道信息与一级传感器信息结合使用以便估计车道的曲率。即,通过使用附加传感器信息,可以存在更多数量的可用于线拟合算法的点。
48.一级传感器装置连同附加传感器装置的支持可以提高在许多场景下横向定位和车道检测的准确性和鲁棒性。例如,通过改进如上所述的车道曲率估计,或者通过改进在信息不清楚时——例如在道路线褪色或因天气条件而不清楚时、在前部传感器的视野(fov)部分或完全被遮挡时或者另外由于交通而导致来自前部传感器的车道标记不清楚时——的横向定位。例如在车道合并的情况下(例如,参见图9),附加传感器信息的使用还可以提供其他方式可能无法获得的进一步相关细节。
49.除了在可用的情况下与一级传感器信息结合工作之外,附加传感器信息的使用可以允许在一级传感器信息的全部或部分被中断的情况下的横向定位。例如,附加传感器信息的使用可以允许车辆在以下情况下保持车道定位:前部传感器被致盲;一个或更多个前部传感器的软件或硬件故障;一个或更多个前部传感器的网络故障;前部传感器中的一个或更多个失去电力;由于道路碎片或其他撞击造成的前部传感器装置210的损坏;由于其他环境条件和/或堆积在传感器上的灰尘造成的对前部传感器的限制。
50.当来自一级传感器装置的全部或部分信息丢失时,控制系统200可以通过将曲线拟合到由每个附加传感器装置220检测到的车道点来预测车辆前方车道的曲率,并且因此可以估计前方车道的曲率。由于附加传感器装置220保持运行,因此控制系统继续具有实时信息而不是依赖于历史数据。
51.为了补充来自一级传感器装置210和每个附加传感器装置220的信息,控制系统还可以访问地图信息和来自诸如gps的定位系统的信息。
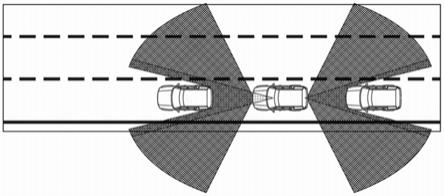
52.图8和图9示出了另外的附加传感器装置的使用。在这种情况下,另外的附加传感器装置是面向侧方的(即面向车辆通常行驶方向的左侧和右侧)。尽管示出了面向后方的附加传感器装置220,但是也可以将面向侧方的附加传感器装置用作替选。
53.图8示出了多个障碍物可能阻挡一级传感器装置的视野,而在这种情况下,可以从面向侧方和面向后方的传感器获得对环境更加详细的理解。图9进一步示出了这样的附加传感器装置在复杂的车道场景中例如在(强制)车道合并期间或类似情况下可能特别有用。同样,附加传感器信息的使用可以改进仅从一级传感器装置获得的横向定位。
54.应当理解,在不脱离本技术的范围的情况下,可以对本发明进行各种改变和修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。