1.本发明属于动力背包技术领域,更具体地,涉及一种提高人体侧向稳定性和降低人体代谢消耗的动力背包。
背景技术:
2.负重行走是人类生活中一种常见的活动,对于作战士兵而言,平均负重达53公斤,负重受伤是作战受伤的4倍之多,还会导致战场表现下降,甚至威胁到他们的生存。对于背包客、学生等群体,负重常常也远超过负重者体重的百分之十五。大质量负重行走会极大增加代谢消耗、易产生疲劳,使作战能力下降,此外负重行走还会产生比重力大2~3倍的加速度力,易导致腰椎、肌肉、关节损伤和肩部组织挫伤。因此,减少负重代谢能耗具有重要意义。采用外骨骼机器人,可以增强负重质量,但动作缓慢同时代谢消耗大大增加,且存在关节无法对齐、动作受限等问题。
3.为提升人体负重行走能力,人们采用动态负载运动方式提高人体负重能力,并降低人体负重的危害。为了降低人体肩部压力峰值,减小负重时对于人体肩部代谢消耗,国外学者rome利用弹簧阻尼模型的原理开发了利用弹力绳和滑轮作为柔性连接系统的减负悬浮背包,(rome,l.c.,rubber bands reduce the cost of carrying loads.nature,444(7122),1023
–
1024,2006)。相关成果已经被lightning packs公司于2007年申请了发明专利(us2008185411a1)。此装置虽可降低代谢和肩部压力,但采用预拉伸式的柔性连接结构时,需要较大的空间以放置相当长的预拉伸的弹力绳和多组滑轮组,其结构复杂、体积庞大。在此基础上华南理工大学申请了几项具有类似结构的减负背包或装置的发明专利(cn107588312a、cn107594857a、cn107616617a、cn108887863a),采用弹簧将负重与弹簧组成的振荡系统,降低人体负重行走时所受到的动态载荷,结构相较于弹力绳结构更为紧凑。
4.但以上悬浮背包的幅频
‑
相频特性固定,只适应于特定行走速度和负重质量,而要达到减负效果,悬浮背包的共振频率要远小于人体行走频率,否则动态负载和代谢消耗反会增加。为了增强装置对不同速度的适应性,在中国发明专利申请cn111000361a的说明书中公开了一种辅助人体负重行走的动力背包装置,该装置将弹力绳作为被动系统,电机调控作为主动系统,通过弹力绳和电机的共同作用调控负载的上下运动,由数据采集单元采集人体运动时在竖直方向的加速度,并将采集的加速度传递给控制器,控制器根据该加速度设定负载竖直方向上的理想加速度,使得负载与人体反相运动,负载加速度达到最小。降低了背包的动态负载力和减小人体代谢消耗。但此种技术方案也采用弹力绳作为主要弹性元件,需绕过多组滑轮组,整体结构冗余体积大。
5.在人体行走运动中,人体侧向稳定性也是其中一个很重要的点,有研究指出,维持人体侧向稳定的能量占据人体代谢消耗的百分之二十,而现有悬浮背包会降低人体稳定性,因为现有悬浮背包都是采用负载与人体质心反相运动原理,将负载运动延迟人体质心运动180
°
相位,所以人体在双腿支承相时负载加速度最小,在单腿支承相的时候负载加速度最大,单腿支承相时给予人体向下的负载力也最大,而单支承相时负载加速度并未落于
足底压力中心正上方,形成一个大的倾覆力矩,额外增大的负载力会导致人体稳定性降低,同时不能将人体代谢消耗进一步降低。
6.针对现有悬浮背包的多项不足,如幅频
‑
相频特性固定,无法适应不同行走速度和负重质量,背包结构冗余、体积大,无法进一步降低人体代谢消耗,会降低人体侧向稳定性等问题,设计一种提高人体侧向稳定性和降低人体代谢消耗的动力背包。
技术实现要素:
7.针对现有技术的以上缺陷或改进需求,本发明提供了一种提高人体侧向稳定性和降低人体代谢消耗的动力背包,其目的在于通过驱动组件带动齿轮齿条机构使得两侧负载反相运动,降低人体行走负载加速度和单支承相时的倾覆力矩,降低人体代谢消耗和增加人体侧向稳定性,由此解决现有悬浮背包体积大,无法适应不同行走速度和负重质量,因此降低人体侧向稳定性以及无法进一步降低人体代谢消耗的技术问题。
8.为实现上述目的,按照本发明的一个方面,提供了一种提高人体侧向稳定性和降低人体代谢消耗的动力背包,包括背包本体,所述背包本体可通过肩带和腰带固定于人体后背,所述背包还包括第一负载、第二负载、滑动组件、运动输出单元、运动控制单元和数据采集单元;
9.所述滑动组件对称设置于所述背包本体的基板上;所述第一负载和所述第二负载分别安装于所述滑动组件;所述运动输出单元设置于所述基板上,所述运动输出单元包括驱动组件和传动组件;
10.所述传动组件包括齿轮、第一齿条和第二齿条,所述齿轮安装于所述驱动组件的输出端,所述第一齿条和所述第二齿条分别沿所述第一负载和所述第二负载相向的侧面设置并与所述齿轮啮合;
11.所述数据采集单元用于采集人体质心的运动信息,并将所述运动信息传递给所述运动控制单元,所述运动控制单元用于根据所述运动信息控制所述驱动组件驱动所述齿轮转动以使所述第一负载和所述第二负载分别沿所述滑动组件反相移动,从而使所述第一负载和所述第二负载的运动幅度与人体运动过程中的上下运动幅度相同、运动频率为人体运动频率的1/2,以增加人体侧向稳定性从而降低人体代谢消耗。
12.进一步优选地,所述第一负载和所述第二负载可盛放不同负重,使用者可将所需负重近似均匀的放置在左右两侧负载,以此通过两侧负载负重的重力相互抵消,采用较小的外力控制两侧负重进行反相运动,使得两侧负载运动幅度与人体上下运动幅度相同,运动频率为人体行走频率的二分之一,当某一侧腿处于单支承相时,与其相对应的同侧负重向下的加速度力最大,与其反侧的负重向下的加速度力最小,以增强人体侧向稳定性和减小人体维持侧向平衡所消耗的能量;此种运动方式相对于普通背包而言,同时还可减小人体在双支承相时的总体加速度力,减小人体行走过程中的负担,有效降低人体行走时的代谢消耗和侧向平衡,降低损伤风险、减轻肌肉疲劳和负重时的肩部压力。
13.进一步优选地,所述基板通过子母铆钉对锁螺丝与背包腰带和背带相连接,减小人体背负部分的不适感。
14.优选地,所述滑动组件包括滑轨、第一滑块、第二滑块和滑块限位块;所述滑轨设有两条,两条所述滑轨平行且错位设置于所述基板上;所述第一滑块和所述第二滑块分别
安装于两条滑轨上,在所述滑轨的两端设有所述滑块限位块,所述滑块限位块通过滑块限位块固定螺钉固定于所述基板上。
15.优选地,所述第一滑块设置于靠近基板外侧的滑轨上,所述第二滑块设置于靠近基板中心的滑轨上;所述第一滑块设有两个,两个所述第一滑块与所述第二滑块的连线构成三角形的稳定结构。
16.优选地,所述驱动组件包括电机支架、电机、减速器和锁止单元,所述电机支架通过电机支架固定螺栓固定于所述基板,且所述电机支架的对称面与所述基板的对称面重合;所述电机通过电机固定螺栓与所述电机支架固定,所述电机的输出轴通过紧定螺钉固定连接于所述齿轮;所述减速器设置于所述电机与所述齿轮之间;所述锁止单元用于所述驱动组件未工作时将所述齿轮锁止以防止所述第一负载和所述第二负载因重力差而产生运动。
17.优选地,所述锁止单元包括电磁锁和锁止孔,所述锁止孔为所述齿轮下侧三个呈弧形分布的孔状结构,所述电磁锁用于在运动控制单元的控制下使其锁芯伸长并插入所述锁止孔内以使所述齿轮停止转动;所述锁止孔的孔径大于所述电磁锁锁芯的直径。
18.优选地,所述运动控制单元包括电机电调和控制器,所述控制器设置于所述基板,所述电机电调设置于所述控制器;所述电机电调用于驱动所述电机并读取电机编码器信息,对所述电机运动情况进行控制;所述控制器用于输出控制信号,该控制信号经驱动芯片放大后控制所述电磁锁弹开,以使所述电磁锁的锁芯伸长插入所述锁止孔内,从而停止所述齿轮转动。
19.优选地,所述数据采集单元包括第一位移传感器、第二位移传感器、加速度传感器和足底压力传感组件;所述第一位移传感器设置于所述基板并连接于所述第一负载,所述第二位移传感器设置于所述基板并连接于所述第二负载,所述第一位移传感器和所述第二位移传感器分别用于测量所述第一负载和所述第二负载的位移数据,并将所述位移数据传输至所述控制器从而实现反馈控制;所述加速度传感器设置于人体髋关节处,用于测量人体质心的运动数据以获得人体在一定时间段的平均行走速度;
20.所述足底压力传感组件包括左脚前脚掌力传感器、左脚后脚跟力传感器、右脚前脚掌力传感器和右脚后脚跟力传感器,所述左脚前脚掌力传感器、左脚后脚跟力传感器、右脚前脚掌力传感器和右脚后脚跟力传感器分别用于测量左右脚脚尖与脚跟的触地时间,并将压力数据传输给所述控制器,所述控制器用于对所述压力数据进行分析划分人体步态周期,并根据所述步态周期信息控制所述电机运动。
21.优选地,还包括电力单元,所述电力单元包括电源、模式切换开关和电压转化模块;所述模式切换开关和所述电源分别固定设置于所述腰带的左右两侧,所述电压转换模块用于将电源电压调制为给所述运动控制单元和所述数据采集单元供电的直流电压,所述模式切换开关用于切换所述背包的工作状态。
22.优选地,还包括蓝牙模块,所述蓝牙模块设置于所述基板,用于将背包的各项数据传递至显示终端。
23.优选地,所述基板设有用于降低基板重量的镂空结构。
24.总体而言,通过本发明所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
25.1、本发明提出的提高人体侧向稳定性和降低人体代谢消耗的动力背包,通过驱动组件带动齿轮齿条机构使得两侧负载反相运动,降低人体行走负载加速度和单支承相时的倾覆力矩,降低人体代谢消耗和增加人体侧向稳定性,降低负重行走过程中的受伤风险。
26.2、本发明提出的提高人体侧向稳定性和降低人体代谢消耗的动力背包具有降低人体代谢消耗和减小肩部压力的有益效果,因背包可降低人体在单腿支承相时的倾覆力矩,降低了人体单腿支承相时维持人体平衡的能量,并且背包也同时降低了双腿支承相时的加速度力,减小了人体负重行走过程中的肩部压力峰值,降低了人体负重行走双腿支承相时腿部做功,降低负重行走过程中的受伤风险。
27.3、本发明提出的提高人体侧向稳定性和降低人体代谢消耗的动力背包相比于其他悬浮背包而言,无弹性原件,无需采用多个弹簧或弹力绳、滑轮组等复杂结构去构成弹簧阻尼系统,而是采用齿轮齿条机构,结构紧凑,大大降低背包尺寸。
28.4、本发明提出的提高人体侧向稳定性和降低人体代谢消耗的动力背包将负重左右近似对称布置,可通过较小功率的电机对左右负重的运动进行调控,相比于现有各种仅幅频
‑
相频固定的悬浮背包,本发明所述背包可以适用于不同质量的负重。
29.5、本发明提出的提高人体侧向稳定性和降低人体代谢消耗的动力背包通过加速度传感器实时采集人体质心运动数据,通过电机对左右负重的运动进行调控,让负重的运动实时与人体运动状态相匹配,因此本发明所述背包可以适用于不同行走速度的负重行走情况。
附图说明
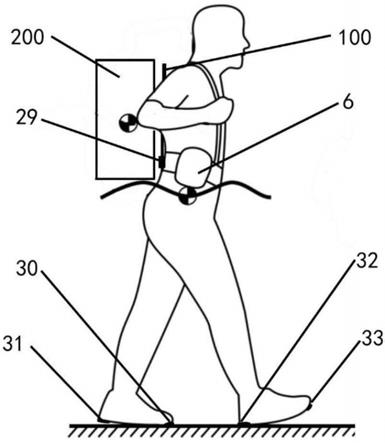
30.图1是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包的传感器布置示意图;
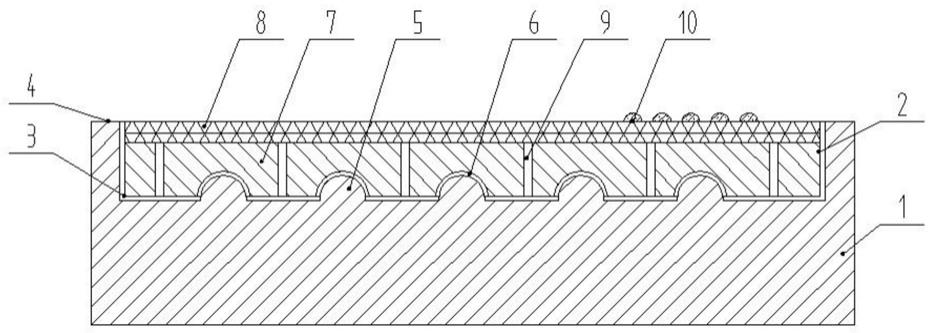
31.图2是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包的结构正视图;
32.图3是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包的整体除左侧负重三维示意图;
33.图4是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包的运动输出单元的结构示意图;
34.图5是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包的锁止单元的结构示意图;
35.图6是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包的控制框架示意图;
36.图7是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包使用时左右两侧负重运动的示意图;
37.图8是本发明提高人体侧向稳定性和降低人体代谢消耗的动力背包使用时左右两侧负重加速度力示意图。
38.在所有附图中,相同的附图标记用来表示相同的元件或结构,其中:1
‑
肩带;2
‑
滑轨;3
‑
第一负载;4
‑
齿轮;5
‑
电机支架;6
‑
第一齿条;7
‑
电源;8
‑
第一滑块;9
‑
齿轮限位块;10
‑
第一位移传感器;11
‑
齿轮限位块固定螺栓;12
‑
电机电调;13
‑
控制器;14
‑
第二位移传感器;
15
‑
滑块限位块固定螺钉;16
‑
腰带;17
‑
模式切换开关;18
‑
滑块限位块;19
‑
位移传感器连接件;20
‑
第二齿条;21
‑
第二负载;22
‑
电机支架固定螺栓;23
‑
第二滑块;24
‑
电磁锁;25
‑
电机;26
‑
减速器;27
‑
电机固定螺栓;28
‑
紧定螺钉;29
‑
加速度传感器;30
‑
左脚前脚掌力传感器;31
‑
左脚后脚跟力传感器;32
‑
右脚前脚掌力传感器;33
‑
右脚后脚跟力传感器;34
‑
运动控制单元;35
‑
运动输出单元;36
‑
电力单元;37
‑
数据采集单元;38
‑
锁止单元;100
‑
背包本体;200
‑
负载;401
‑
锁止孔。
具体实施方式
39.为了使本发明的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本发明,并不用于限定本发明。此外,下面所描述的本发明各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
40.在本发明的描述中,需要理解的是,术语“中心”、“侧向”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
41.请参阅图1
‑
图6,本发明提出一种提高人体侧向稳定性和降低人体代谢消耗的动力背包,该背包包括负载200和背包本体100,所述负载200包括第一负载3和第二负载21,两侧分别可用于盛放负重,使用者可将负重近似均匀的放置在左右两侧负载。所述背包本体100包括运动控制单元34、运动输出单元35、电力单元36、数据采集单元37、锁止单元38、肩带1、腰带16、基板、滑轨2、第一滑块8、第二滑块23、滑块限位块18、模式切换开关17;所述运动控制单元34连接所述运动输出单元35、所述电力单元36、数据采集单元37和锁止单元38,用于实现各个单元的数据采集与处理,并根据处理后的数据信息控制所述运动输出单元35,使左右两侧负载200进行上下运动,所述运动输出单元35通过can总线以及电源线与所述运动控制单元34进行连接,用于将控制信息转化为所需运动方式,驱动所述第一负载3和所述第二负载21进行上下运动,所述电力单元36包括24v的直流电源6、模式切换开关17以及电压转化模块,可为所述运动控制单元35和所述运动输出单元36进行供电。所述数据采集单元37包括第一位移传感器10、第二位移传感器14、加速度传感器29、左脚前脚掌力传感器30、左脚后脚跟力传感器31、右脚前脚掌力传感器32和右脚后脚跟力传感器33,用于测量负重运动位移数据以及人体位移和步态数据。所述锁止单元38包括电磁锁24和锁止孔401,用于机构为工作时的锁止,防止两侧重物因重力差而产生运动。
42.更进一步的说明,如图1、图2、图3和图6所示,所述背包本体100包括运动控制单元34、运动输出单元35、电力单元36、数据采集单元37、锁止单元28、肩带1、腰带16、基板、滑轨2、第一滑块8、第二滑块23、滑块限位块18、模式切换开关17,所述背包本体100通过所述肩带1与所述腰带16与人体进行连接,所述肩带1与所述腰带16通过铆钉与所述基板进行连接,可保证连接处的平整,消除人体背负的不适感。
43.如图2、图3和图6所示,所述的运动控制单元34通过串口读取数据采集单元37的数据信息,并通过控制单元mcu对传感器信息进行处理与分析,所述运动控制单元34通过电机电调12驱动所述运动输出单元的电机25,并读取电机编码器信息,对所述电机25运动情况
进行控制。所述运动控制单元34通过驱动芯片连接所述锁止单元38的所述电磁锁24,控制所述运动输出单元35的锁止。
44.更进一步的说明,如图6所示,所述数据采集单元37包括加速度传感器29、第一位移传感器10、第二位移传感器14、左脚前脚掌力传感器30、左脚后脚跟力传感器31、右脚前脚掌力传感器32和右脚后脚跟力传感器33,所述加速度传感器29固定于人体髋关节,用于测量人体质心运动数据,获得人体在一定时间段的平均行走速度,通过如下公式(1)计算得到人体质心的运动振幅。
[0045][0046]
再通过公式(2)计算人体行走频率
[0047][0048]
即可得到人体质心运动方程
[0049]
x=a*sin(ωt)
[0050]
所述第一位移传感器10和所述第二位移传感器14分别用于测量所述第一负载3和所述第二负载21的位移数据,并将位移数据传输至所述控制器13,实现反馈控制。所述左脚前脚掌力传感器30、左脚后脚跟力传感器31、右脚前脚掌力传感器32和右脚后脚跟力传感器33,分别用于测量左右脚脚尖与脚跟触地时间,并将压力数据传输至所述控制器13,所述控制器13通过对压力数据进行分析划分人体步态周期,并根据步态周期信息控制所述电机25运动,实现负重与人体步态周期符合图7所示的运动关系。
[0051]
如图1和图6所示,所述电力单元36包括电源7、模式切换开关17和电压转化模块,所述电源7固定于背包右侧腰带16上。优选地,所述电源7为24v锂电池。所述电压转化模块可将24v电压调制为5v直流电压,给所述运动控制单元34和所述数据采集单元37进行供电。所述模式切换开关17固定于背包左侧腰带16,用于切换背包的工作状态。
[0052]
如图2、图3所示,所述基板上左右分别通过螺栓固定有两根滑轨2,所述两根滑轨2上下错开设置,靠外侧的滑轨2上有两个第一滑块8,靠内侧的滑轨2上有一个第二滑块23,所述第一滑块8与所述第二滑块23构成一个三角形的稳定结构,所述第一滑块8与所述第二滑块23通过螺栓分别与所述第二负载21和所述第一负载3相连接,使得所述第二负载21和所述第一负载3分别沿着左右两侧滑轨2上下运动。所述滑轨2两端设有滑块限位块16,分别通过滑块限位块固定螺栓15固定于所述基板上,防止滑块滑出滑轨或者负重运动距离超出限位区间。所述基板下部固定有所述第一位移传感器10和所述第二位移传感器14,所述第二位移传感器14和所述第一位移传感器10分别通过位移传感器连接件19与所述第二负载21和所述第一负载3相连接,用于测量左右两侧背包的实际位移数据,并将数据传输给所述控制器12。所述基板下部中间位置布置有控制器13和电机电调12,所述控制器13和所述电机电调12构成运动控制单元34,用于控制电机25的运动输出。所述的电机电调12通过can总线和电源线与控制器13进行连接,并将调制后的三相交流电输入所述电机25,电机编码器
再将运动数据传输给电机电调12并返回给所述控制器13,实现闭环控制。
[0053]
如图4和图5所示,所述运动输出单元35包括电机支架5、电机25、齿轮4、第一齿条6、第二齿条20、齿轮限位块9、齿轮限位块固定螺栓11和减速器26,所述电机支架5通过电机支架固定螺栓22固定于基板,所述电机支架5的对称面与基板的对称面重合,所述电机25通过电机固定螺栓27与所述电机支架5相固定,所述齿轮4通过紧定螺钉28与所述电机25的输出轴相固定,所述齿轮4左右两侧分别与所述第一齿条6和所述第二齿条20相啮合,当齿轮4转动时所述第一齿条6和所述第二齿条20分别朝相反方向以相反速度进行运动。所述第一齿条6和所述第二齿条20两端分别固定有齿轮限位块9,并通过齿轮限位块固定螺栓11分别与所述第一负载3和所述第二负载21相固定,带动负重上下运动。
[0054]
更进一步的说明,如图5所示,所述的锁止单元38包括锁止孔401和电磁锁24,所述运动控制单元34可通过驱动芯片连接锁止单元38的所述电磁锁24,在为工作状态下,为防止负重左右不平衡或者系统扰动造成左右两侧负载无序运动,所述控制器13通过输出控制信号,经过驱动芯片放大后控制所述电磁锁24弹开,使得所述电磁锁24的锁芯伸长插入所述锁止孔401,使得所述齿轮4无法进行转动,实现对运动输出单元35的锁止;所述锁止孔401为所述齿轮4下侧三个呈弧形分布的孔状结构,且所述锁止孔401尺寸稍大于所述电磁锁24锁芯,方便快速进行锁止。
[0055]
如图7、8所示,当人体位于左腿直立位于左腿单支承相最高点时,人体质心运动方程为
[0056]
x=a*cos(ωt)
[0057]
此时左侧负重运动至最低点,左侧负重位移
[0058]
x
左
=
‑
a*cos(2ωt)
[0059]
其左侧负重给人体的力
[0060]
f
左
=[g a2*cos(2ωt)]*m
左
[0061]
其右侧负重给人体的力
[0062]
f
右
=[g
‑
a2*cos(2ωt)]*m
右
[0063]
因为此时左侧腿为支撑点,所以左侧负重再人体侧向不产生倾覆力矩,
[0064]
m
左右
=0
[0065]
而右侧负重因为人体步宽的存在,受力方向与人体支撑点不重合,所以存在倾覆力矩
[0066]
m
右
=[g
‑
a2*cos(2ωt)]*m
左
*w
[0067]
其中w为人体步宽。
[0068]
若为普通悬浮背包,则再单支承相时负重的加速度最大,因此也会产生一个较大的倾覆力矩
[0069][0070]
当左侧与右侧负重近似相等时
[0071][0072]
我们易知
[0073]
m
左
m
右
<m0[0074]
因此本发明所述的背包可降低人体负重行走时的侧向倾覆力矩,并提高人体侧向稳定性。
[0075]
此外,当人体位于双支撑相时,本发明两侧负载运动至同一水平位置,此时左右两侧负载对于人体不施加加速度力,相比于普通背包,消除了人体在双支承相时由于加速度给人体造成的影响,降低了人体肩部压力。而有研究指出增强人体侧向稳定性可降低人体代谢消耗,而人体负重行走时代谢消耗主要用于人体以及负重上下振荡和人体侧向平衡的维持,因此人体负重行走过程中的代谢消耗可表示为:
[0076][0077]
而由上式可知,本发明即降低人体对于质心上下运动的能量消耗w1,同时降低了人体行走过程中维持人体平衡的代谢消耗w2,由此可知本发明所阐述的背包可降低人体在负重行走过程中的代谢消耗。
[0078]
当人体右腿位于单支承相时,左侧负重达到最高点,此时左侧负重对人体的加速度力最小,而右侧负重达到最低点,此时右侧负重对人体的加速度力最大,同样降低人体负重行走时的侧向倾覆力矩,并提高人体侧向稳定性。
[0079]
如此往复循环,使用本发明所述背包可提高人体侧向稳定性,降低了人体肩部压力,并降低人体代谢消耗。
[0080]
下面将具体说明本发明的工作原理。
[0081]
在使用该动力背包负重行走时具体过程如下:
[0082]
使用者通过肩带1和腰带16将背包固定于人体,打开电源开关,背包进入初始化状态,控制器13通过驱动芯片控制电磁锁24锁芯收缩,使得运动输出单元35的齿轮4可以进行转动,再控制电机25通过运动输出单元35带动左右两侧背包进行运动,通过第二位移传感器14和第一位移传感器10分别确定背包的初始位置。然后背包默认进入待机模式,待机模式中,电机25通过第一位移传感器10和第二位移传感器14的位移数据构成闭环pid控制,动过运送输出单元使得左右两侧位移相同,使左右两侧背包都位于同一水平位置,加速度传感器29通过滑动窗测量人体一小段时间内的平均行走速度并将数据传输给控制器13,控制器通过对加速度传感器29数据的实时处理得到人体运动的近似三角函数。当按下左侧腰带的模式切换开关17后,背包进入工作状态,控制器13读取所述左脚前脚掌力传感器30、左脚后脚跟力传感器31、右脚前脚掌力传感器32和右脚后脚跟力传感器33的数据,划分人体步态参数,控制器13根据人体实时的运动三角函数和人体步态参数控制电机运动规律,电机25通过带动齿轮4驱动第一齿条6和第二齿条20进行上下运动,控制器13通过控制算法生成的命令发送电流信号给电机电调12,电机电调12工作再电流控制模式,控制电机25产生相应的运动输出,并使得左右两侧背包按图7所述运动规律进行运动,降低人体负重行走时的侧向倾覆力矩,提高人体侧向稳定性,降低了人体肩部压力和代谢消耗。
[0083]
本领域的技术人员容易理解,以上所述仅为本发明的较佳实施例而已,并不用以限制本发明,凡在本发明的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。