1.本发明涉及挖树技术领域,具体为挖树机器人。
背景技术:
2.随着“绿色、健康、安全”的理念深入人心,很多地方都在大力建设绿色环保城市,因此每一个地方都需要大量的苗木移栽;同时我国国内由于培植苗木的土地资源比较稀缺,大部分苗木在苗圃园里种植较紧密,为了让苗木之间留有足够的空间从而提高苗木生长速度,在苗木生长过程中也需要进行挑拣移栽。
3.现有的挖树作业大多采用传统的人工挖掘方式,采用人工作业不仅劳动强度大、效率低费用高,而且挖出的苗木的土球质量很难保证,导致后苗木移植后的生存率较低。为此,我们提出挖树机器人。
技术实现要素:
4.本发明的目的在于提供挖树机器人,以解决上述背景技术中提出的问题。
5.为实现上述目的,本发明提供如下技术方案:挖树机器人,包括,
6.承接组件,所述承接组件包括安装架,且安装架底端固定有连接架,且连接架外壁套设有弧形导向架,且弧形导向架顶部滑动设置有弧形块;
7.挖出组件,所述挖出组件包括一端与弧形块顶部固定的可调节伸缩臂,且可调节伸缩臂另一侧开设有通口,且通口内通过转轴与连接臂中部转动连接,所述连接臂底部开设有凹口,且凹口内活动设置有伸缩装置一,且伸缩装置一输出端固定有铲体;
8.提升限位组件,所述提升限位组件设置在安装架的前侧外壁。
9.进一步地,所述弧形导向架顶部前侧两端均固定有限位框,所述弧形导向架顶部固定有弧形导轨,且弧形导轨内滑动设置有弧形块,且弧形块的外壁固定有弧形齿条,所述弧形导轨的两端分别处于两侧限位框内,所述可调节伸缩臂与弧形块顶部一端固定。
10.进一步地,所述弧形导向架的左侧外壁前端一体成型有凸部,且凸部顶部开设有凹槽,且凹槽内固定有驱动装置一,所述驱动装置一输出端固定有与弧形齿条啮合的驱动齿轮。
11.进一步地,所述弧形导轨左右侧相对一端均为中空,所述弧形导轨内侧壁和外侧壁均弧形阵列转动设置有多组滚珠,且弧形块的内壁和外壁均开设有与滚珠配合的弧形槽。
12.进一步地,所述连接臂的左侧顶部通过t形滑槽滑动设置有适配的移动块,且移动块的左侧通过u形座和转轴与伸缩装置二输出端转动连接,且伸缩装置二通过镶块与可调节伸缩臂顶部固定。
13.进一步地,所述伸缩装置一顶部固定有安装板,且凹口的两侧内壁均固定有竖向的导轨,且安装板的端部通过滑块与导轨滑动连接,滑块底部通过弹簧与导轨底部内壁固定,所述安装板顶部转动设置有滚珠。
14.进一步地,凹口内且处于安装板上方的位置活动设置有与滚珠配合的凸轮,且凸轮固定套设在转轴外壁,且转轴一端活动贯穿连接臂的一侧并与驱动装置二输出端固定,且驱动装置二固定在连接臂侧部外壁。
15.进一步地,所述安装架的前方且处于弧形导向架上方的位置固定有弧形限位架,且弧形限位架的左右侧均固定有凸部,左右侧凸部相背一侧均固定有气缸二,且气缸二输出端活动贯穿弧形限位架并固定有弧形限位板。
16.进一步地,所述弧形限位架的后端中央固定有导向块,所述安装架的前侧外壁固定有竖向的导向架,且导向块滑动设置在导向架前侧开设的导向槽内,所述导向架顶部固定有气缸一,且气缸一输出端活动贯穿导向架顶部并与导向块顶部固定
17.进一步地,两组所述弧形限位板相对一侧均设置有弧形的保护垫,且保护垫为橡胶保护垫。
18.与现有技术相比,本发明的有益效果是:本发明设置有承接组件,在进行挖树时,通过弧形导向架、弧形块和弧形限位架前侧的缺口使得待挖出的苗木进入,通过驱动气缸一使得导向块在导向槽内移动调整弧形限位架的位置,调整至指定位置后,通过打开气缸二使得弧形限位板向内侧移动,通过两组弧形限位板对待挖出的苗木进行限位,再通过打开伸缩装置二使得连接臂的一端摆动,调整铲体的位置,调整后,通过驱动伸缩装置一使得铲体进入待挖出的苗木的周围土壤内,通过打开驱动装置一带动驱动齿轮,使得弧形齿条带动弧形块使得挖出组件从弧形导向架的一端转动至弧形导向架的另一端,挖出半圆形土球包覆在苗木的根部,提高苗木的后续移植存活率,同时在挖树时,通过打开驱动装置二可带动凸轮使得安装板往复移动,使得铲体更好的进入土壤进行挖树作业,提高挖树效率和挖树质量,在挖除后,通过打开气缸一使得待挖出的苗木向上完成苗木脱离土壤作业,降低人工劳动强度、效率高费用低,挖出的苗木的土球质量较高,使得苗木移植后的生存率较高。
附图说明
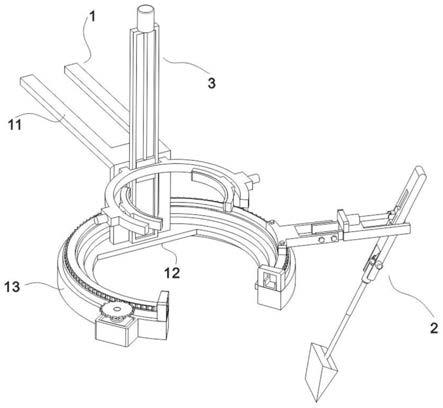
19.图1为本发明挖树机器人结构立体图;
20.图2为本发明承接组件结构立体图;
21.图3为本发明挖出组件结构立体图;
22.图4为本发明提升限位组件结构立体图。
23.图中:1、承接组件;11、安装架;12、连接架;13、弧形导向架;14、弧形导轨;15、弧形块;16、弧形齿条;17、驱动装置一;18、驱动齿轮;2、挖出组件;21、可调节伸缩臂;22、连接臂;23、伸缩装置一;24、铲体; 25、移动块;26、伸缩装置二;27、弹簧;28、驱动装置二;29、凸轮;3、提升限位组件;31、导向架;32、气缸一;33、弧形限位架;34、气缸二; 35、保护垫;36、弧形限位板。
24.附图仅用于示例性说明,不能理解为对本专利的限制;为了更好说明本实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对于本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
具体实施方式
25.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
26.实施例1
27.请参阅图1
‑
4,本发明提供挖树机器人(本发明中的电器元件均通过导线与外部电源连接),包括,
28.承接组件1,承接组件1包括安装架11,安装架11呈l形,该装置通过安装架11和本领域应用广泛的固定部件(例如螺栓等)安装在外界可移动并且可带动升降的设备上,在此不另做详述,且安装架11底端固定有连接架12,连接架12起到支撑和安装结构的作用,且连接架12外壁套设有弧形导向架 13,对弧形块15的移动起到导向和支撑的作用,且弧形导向架13顶部滑动设置有弧形块15,起到支撑和安装结构的作用;
29.挖出组件2,挖出组件2包括一端与弧形块15顶部固定的可调节伸缩臂 21,可调节伸缩臂21属于现有技术,可进行长度调整,在此不另做详述,实现挖树直径调整,且可调节伸缩臂21另一侧开设有通口,且通口内通过转轴与连接臂22中部转动连接,方便调整铲体24的进土角度,连接臂22底部开设有凹口,且凹口内活动设置有伸缩装置一23,伸缩装置一23可采用气缸、液压缸或电液推缸等,在此不另做详述,且伸缩装置一23输出端固定有铲体 24,方便进入土壤中随后进行圆周运动,挖出半圆形土块,半圆形土块包裹苗木的树根,提高苗木移植后的存活率;
30.提升限位组件3,提升限位组件3设置在安装架11的前侧外壁,对苗木起到限位的作用,也方便铲体24进行圆周运动后,使得苗木向上脱离土壤。
31.请参阅图1
‑
2,弧形导向架13顶部前侧两端均固定有限位框,限制挖出组件2的转动位置,限位框使得弧形块15和弧形齿条16穿过,弧形导向架 13顶部固定有弧形导轨14,弧形导轨14对弧形块15起到限位和导向的作用,在正常使用时,弧形块15和弧形导向架13前侧的通口相对应,使得待挖出的苗木处于弧形块15和弧形导向架13内,弧形块15滑动设置在弧形导轨14 顶部,且弧形块15的外壁固定有弧形齿条16,弧形导轨14的两端分别处于两侧限位框内,弧形齿条16用于使得驱动装置一17带动弧形块15进行圆周运动,可调节伸缩臂21与弧形块15顶部一端固定;
32.请参阅图1
‑
2,弧形导向架13的左侧外壁前端一体成型有凸部,起到支撑和安装结构的作用,且凸部顶部开设有凹槽,且凹槽内固定有驱动装置一 17,驱动装置一17由伺服电机和减速器组成,在本领域中应用广泛,在此不另做详述,驱动装置一17输出端固定有与弧形齿条16啮合的驱动齿轮18,驱动装置一17带动驱动齿轮18和弧形齿条16配合使得弧形块15转动,使得挖出组件2从一端转动至另一端,然后,驱动装置一17再使得弧形块15 反向转动使得挖出组件2复位;
33.请参阅图1
‑
2,弧形导轨14左右侧相对一端均为中空,方便弧形块15进行圆周运动,弧形导轨14内侧壁和外侧壁均弧形阵列转动设置有多组滚珠(图中未示出),对弧形块15起到限位的作用,使得弧形块15不会上下移动,且弧形块15的内壁和外壁均开设有与滚珠配合的弧形槽(图中未示出)。
34.实施例2
35.请参阅图3,连接臂22的左侧顶部通过t形滑槽滑动设置有适配的移动块25,移动块25可在t形滑槽内上下移动,同时不会脱离t形滑槽,且移动块25的左侧通过u形座和转轴与伸缩装置二26输出端转动连接,伸缩装置二26可采用电动伸缩杆,且伸缩装置二26通过镶块与可调节伸缩臂21顶部固定,通过打开伸缩装置二26,使得移动块25在t形滑槽内移动,进而使得连接臂22的上部向一侧摆动,实现铲体24的进入角度调整;
36.请参阅图3,伸缩装置一23顶部固定有安装板,且凹口的两侧内壁均固定有竖向的导轨,对安装板的移动起到导向和限位的作用,且安装板的端部通过滑块与导轨滑动连接,滑块底部通过弹簧27与导轨底部内壁固定,弹簧 27在凸轮29的凸端朝上时,使得向下的安装板向上复位,安装板顶部转动设置有滚珠,用于与凸轮29接触,降低接触磨损;
37.请参阅图3,凹口内且处于安装板上方的位置活动设置有与滚珠配合的凸轮29,凸轮29转动顶动安装板上下往复移动,且凸轮29固定套设在转轴外壁,转轴的另一端采用轴承与凹口内壁另一侧转动连接,且转轴一端活动贯穿连接臂22的一侧并与驱动装置二28输出端固定,且驱动装置二28固定在连接臂22侧部外壁,驱动装置二28为微型电机和减速器组成,在此不另做详述。
38.其余结构与实施例1相同
39.实施例3
40.请参阅图4,安装架11的前方且处于弧形导向架13上方的位置固定有弧形限位架33,用于使得待挖除的苗木进入,且弧形限位架33的左右侧均固定有凸部,起到支撑和安装结构的作用,左右侧凸部相背一侧均固定有气缸二 34,且气缸二34输出端活动贯穿弧形限位架33并固定有弧形限位板36,通过气缸二34使得弧形限位板36移动接触待挖除的苗木的外壁,对待挖除的苗木起到限位的作用,同时方便铲体24圆周运动后给与待挖除的苗木向上的力,使得待挖除的苗木脱离土壤;
41.请参阅图4,弧形限位架33的后端中央固定有导向块,安装架11的前侧外壁固定有竖向的导向架31,导向架31的前侧带有竖向的导向槽,且导向块滑动设置在导向架31前侧开设的导向槽内,导向架31顶部固定有气缸一32,且气缸一32输出端活动贯穿导向架31顶部并与导向块顶部固定,通过气缸一32驱动导向块在导向槽内上下移动,使得待挖除的苗木向上脱离土壤;
42.请参阅图4,两组弧形限位板36相对一侧均设置有弧形的保护垫35,且保护垫35为橡胶保护垫35,通过气缸二34使得弧形限位板36移动,进而通过弧形限位板36上的保护垫35接触待挖除的苗木外壁,一方面降低对待挖除的苗木外壁造成的损伤,另一方面提高摩擦力,使得后续更好的带动待挖除的苗木向上脱离土壤。
43.其余结构与实施例2相同
44.本发明使用到的标准零件均可以从市场上购买,异形件根据说明书的和附图的记载均可以进行订制,各个零件的具体连接方式均采用现有技术中成熟的螺栓、铆钉、焊接等常规手段,机械、零件和设备均采用现有技术中,常规的型号,加上电路连接采用现有技术中常规的连接方式,在此不再详述。
45.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换
和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。