技术特征:
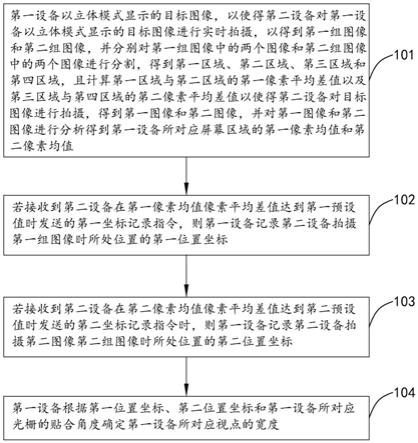
1.一种视点的宽度确定方法,其特征在于,包括:第一设备以立体模式显示目标图像,以使得第二设备对所述第一设备以立体模式显示的目标图像进行实时拍摄,以得到第一组图像和第二组图像,并分别对所述第一组图像中的两个图像和所述第二组图像中的两个图像进行分割,得到第一区域、第二区域、第三区域和第四区域,且计算所述第一区域与所述第二区域的第一像素平均差值以及所述第三区域与所述第四区域的第二像素平均差值,其中,所述第一组图像和所述第二组图像为所述第二设备在不同位置通过设置于所述第二设备的两个摄像头同时对所述目标图像进行拍摄得到,且所述第二设备的两个摄像头处于同一水平线,所述第二设备的两个摄像头的中心间距为预设距离,所述第一区域和所述第二区域与所述第一组图像中的两个图像相对应,所述第三区域和所述第四区域与所述第二组图像中的两个图像相对应;若所述第一设备接收到所述第二设备在所述第一像素平均差值达到第一预设值时发送的第一坐标记录指令,则所述第一设备记录所述第二设备拍摄所述第一组图像时的第一位置坐标;若所述第一设备接收到所述第二设在在所述第二像素平均差值达到第二预设值时发送的第二坐标记录指令,则所述第一设备记录记录所述第二设备拍摄所述第二组图像时的第二位置坐标;所述第一设备根据所述第一位置坐标、所述第二位置坐标和所述第一设备所对应的光栅的贴合角度确定所述第一设备所对应的视点的宽度。2.根据权利要求1所述的方法,其特征在于,所述第一设备根据所述第一位置坐标和所述第二位置坐标确定所述第一设备所对应的视点的宽度包括:所述第一设备根据所述贴合角度和所述第一位置坐标确定所述第二设备的第一位置,所述第一位置为所述第一像素平均差值达到所述第一预设值时所述第二设备的位置;所述第一设备根据所述贴合角度和所述第二位置坐标确定所述第二设备的第二位置,所述第二位置为所述第二像素平均差值达到所述第二预设值时所述第二设备的位置;根据所述第一位置和所述第二位置确定所述视点的宽度。3.根据权利要求2所述的方法,其特征在于,所述第一设备根据所述贴合角度和所述第一位置坐标确定所述第二设备的第一位置包括:所述第一设备通过如下公式计算所述第一位置:x0′
=x0 (y0‑
y)*tan(a);其中,x0′
为所述第一位置,所述第一位置坐标为(x0,y0),y为预设的常量,a为所述贴合角度;所述第一设备根据所述贴合角度和所述第二位置坐标确定所述第二设备的第二位置包括:所述第一设备通过如下公式计算所述第二位置:x1′
=x1 (y1‑
y)*tan(a);其中,x1′
为所述第二位置,所述第二位置坐标为(x1,y1);所述第一设备根据所述第一位置和所述第二位置确定所述视点的宽度包括:所述第一设备通过如下公式计算所述视点的宽度:vw=abs(x0′‑
x1′
);
其中,vw为所述视点的宽度,abs为绝对值函数。4.根据权利要求1至3中任一项所述的方法,其特征在于,所述方法还包括:获取所述光栅的宽度;根据所述光栅的宽度和所述视点的宽度确定所述第一设备所对应的视点的排列布局;根据所述视点的排列布局以及用户的人眼位置变化对所述第一设备在立体模式下运行时显示的立体图像进行调整。5.一种视点宽度的确定方法,其特征在于,包括:第二设备对第一设备以立体模式显示的目标图像进行实时拍摄,以得到第一组图像和第二组图像,所述第一组图像和所述第二组图像为所述第二设备在不同位置通过设置于所述第二设备的两个摄像头同时对所述目标图像进行拍摄得到,且所述第二设备的两个摄像头处于同一水平线,所述第二设备的两个摄像头的中心间距为预设距离;所述第二设备分别对所述第一组图像中的两个图像和所述第二组图像中的两个图像进行分割,得到第一区域、第二区域、第三区域和第四区域,其中,所述第一区域和所述第二区域与所述第一组图像中的两个图像相对应,所述第三区域和所述第四区域与所述第二组图像中的两个图像相对应;所述第二设备分别计算所述第一区域与所述第二区域的第一像素平均差值以及所述第三区域与所述第四区域的第二像素平均差值;若所述第一像素平均差值达到第一预设值,则所述第二设备发送第一坐标记录指令至所述第一设备,以使得所述第一设备记录第一坐标位置,所述第一位置坐标为所述第二设备在拍摄所述第一组图像时所处位置的坐标;若所述第二像素平均差值达到第二预设值,则所述第二设备发送第二坐标记录指令至所述第一设备,以使得所述第一设备记录第二位置坐标,并根据所述第一位置坐标、所述第二位置坐标和所述第一设备所对应的光栅的贴合角度确定所述第一设备所对应的视点的宽度,所述第二位置坐标为所述第二设备在拍摄所述第二组图像时所处位置的坐标。6.根据权利要求5所述的方法,其特征在于,所述第二设备分别计算所述第一区域与所述第二区域的第一像素平均差值以及所述第三区域与所述第四区域的第二像素平均差值包括:所述第二设备通过如下公式计算所述第一像素平均差值:其中,aver_piexl为所述第一像素平均差值,w为所述第一区域的宽度,h为所述第一区域的高度,al为所述第一区域,ar为所述第二区域,所述第一区域和所述第二区域的宽度相同,高度相同;所述第二设备通过如下公式计算所述第二像素平均差值:其中,aver_piexl为所述第二像素平均差值,w为所述第三区域的宽度,h为所述第三区域的高度,al为所述第三区域,ar为所述第四区域,所述第三区域和所述第四区域的宽度相同,高度相同。7.一种设备,所述设备为第一设备,其特征在于,包括:
显示单元,用于以立体模式显示目标图像,以使得第二设备对所述第一设备以立体模式显示的目标图像进行实时拍摄,以得到第一组图像和第二组图像,并分别对所述第一组图像中的两个图像和所述第二组图像中的两个图像进行分割,得到第一区域、第二区域、第三区域和第四区域,且计算所述第一区域与所述第二区域的第一像素平均差值以及所述第三区域与所述第四区域的第二像素平均差值,其中,所述第一组图像和所述第二组图像为所述第二设备在不同位置通过设置于所述第二设备的两个摄像头同时对所述目标图像进行拍摄得到,且所述第二设备的两个摄像头处于同一水平线,所述第二设备的两个摄像头的中心间距为预设距离,所述第一区域和所述第二区域与所述第一组图像中的两个图像相对应,所述第三区域和所述第四区域与所述第二组图像中的两个图像相对应;记录单元,用于若所述第一设备接收到所述第二设备在所述第一像素平均差值达到第一预设值时发送的第一坐标记录指令,则所述第一设备记录所述第二设备拍摄所述第一组图像时的第一位置坐标;若所述第一设备接收到所述第二设在在所述第二像素平均差值达到第二预设值时发送的第二坐标记录指令,则记录记录所述第二设备拍摄所述第二组图像时的第二位置坐标;确定单元,用于根据所述第一位置坐标、所述第二位置坐标和所述第一设备所对应的光栅的贴合角度确定所述第一设备所对应的视点的宽度。8.一种设备,所述设备为第二设备,其特征在于,包括:拍摄单元,用于对第一设备以立体模式显示的目标图像进行实时拍摄,以得到第一组图像和第二组图像,所述第一组图像和所述第二组图像为所述第二设备在不同位置通过设置于所述第二设备的两个摄像头同时对所述目标图像进行拍摄得到,且所述第二设备的两个摄像头处于同一水平线,所述第二设备的两个摄像头的中心间距为预设距离;分割单元,用于分别对所述第一组图像中的两个图像和所述第二组图像中的两个图像进行分割,得到第一区域、第二区域、第三区域和第四区域,其中,所述第一区域和所述第二区域与所述第一组图像中的两个图像相对应,所述第三区域和所述第四区域与所述第二组图像中的两个图像相对应;计算单元,用于分别计算所述第一区域与所述第二区域的第一像素平均差值以及所述第三区域与所述第四区域的第二像素平均差值;收发单元,用于若所述第一像素平均差值达到第一预设值,则发送第一坐标记录指令至所述第一设备,以使得所述第一设备记录第一坐标位置,所述第一位置坐标为所述第二设备在拍摄所述第一组图像时所处位置的坐标;若所述第二像素平均差值达到第二预设值,则发送第二坐标记录指令至所述第一设备,以使得所述第一设备记录第二位置坐标,并根据所述第一位置坐标、所述第二位置坐标和所述第一设备所对应的光栅的贴合角度确定所述第一设备所对应的视点的宽度,所述第二位置坐标为所述第二设备在拍摄所述第二组图像时所处位置的坐标。9.一种计算机设备,其特征在于,包括:至少一个连接的处理器、存储器和收发器,其中,所述存储器用于存储程序代码,所述处理器用于调用所述存储器中的程序代码来执行上述权利要求1至4和权利要求5至6中任一项所述的视点宽度的确定方法。10.一种计算机存储介质,其特征在于,包括:
指令,当所述指令在计算机上运行时,使得计算机执行权利要求1至4和权利要求5至6中任一项所述的视点宽度的确定方法。
技术总结
本发明提供了一种视点的宽度确定方法,包括:显示目标图像,以使得第二设备对目标图像进行实时拍摄,以得到第一组图像和第二组图像,并分别对第一组图像中的两个图像和第二组图像中的两个图像进行分割,得到第一区域、第二区域、第三区域和第四区域,且计算第一区域与第二区域的第一像素平均差值以及第三区域与第四区域的第二像素平均差值;若第一像素平均差值达到第一预设值时,则记录第二设备拍摄第一组图像时的第一位置坐标;若第二像素平均差值达到第二预设值时,则记录第二设备拍摄第二组图像时的第二位置坐标;根据第一位置坐标、第二位置坐标和第一设备所对应的光栅的贴合角度确定第一设备所对应的视点的宽度。合角度确定第一设备所对应的视点的宽度。合角度确定第一设备所对应的视点的宽度。
技术研发人员:贺曙 徐万良
受保护的技术使用者:未来科技(襄阳)有限公司
技术研发日:2021.09.08
技术公布日:2021/12/11
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。