1.本发明属于真空泵技术领域,尤其是涉及一种基于包络面修正的特殊爪型真空泵型线设计方法。
背景技术:
2.真空泵是指利用机械、物理、化学或物理化学的方法对被抽容器进行抽气而获得真空的器件或设备。通俗来讲,真空泵是用各种方法在某一封闭空间中改善、产生和维持真空的装置。
3.真空泵中的核心部件是一对相啮合的旋向相反的转子,转子型线的设计直接影响到真空泵的性能,如密封性、效率、面积利用系数等;其中优化型线设计是提高整机性能的关键。
4.目前已公开的真空泵型线中较多存在的问题有:
5.1.转子型线不共轭,或者共轭的转子型线的接触线不连续,这样会产生较大的泄露,影响真空泵的性能。
6.2.一对转子在运转的过程中,经常会产生透孔,这样会增大泄露量,降低真空泵性能。
7.3、将上述一对转子可定义为主动轮和从动轮,传统方法求解从动轮的方法为:在给定主动轮的型线参数后,分别根据主动轮各段曲线不同的特性,采用不同的公式首先计算啮合点,然后再根据坐标变换求从动轮型线。然而采用传统算法,计算复杂,且主动轮曲线只能是简单的直线或圆弧才能够计算。当主动轮修改为一些特殊曲线或者样条曲线后,啮合点的计算复杂程度更是大幅增加,这使得从动轮的曲线计算几乎成为不可能。另外,由于主动轮型线分段设计,传统方法中从动轮型线也需要分段计算,而这时分段计算的结果在不同段之间存在交叉、重叠或者间断的风险。
技术实现要素:
8.本发明为了克服现有技术的不足,提供一种的基于包络面修正的特殊爪型真空泵型线设计方法。
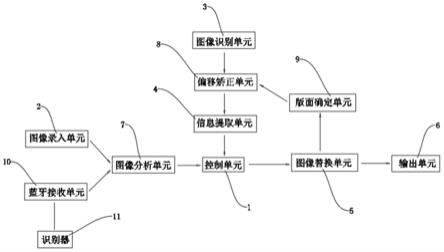
9.为了实现上述目的,本发明采用以下技术方案:一种基于包络面修正的特殊爪型真空泵型线设计方法,该特殊爪型真空泵包括壳体、设于所述壳体内的主动轮及设于所述壳体内的从动轮,所述从动轮与主动轮形成共轭关系;所述主动轮、从动轮分别连接有一个齿轮,两个齿轮相互啮合以带动主动轮、从动轮同步转动;其特征在于:该真空泵型线设计方法包括以下步骤:
10.s1:获得主动轮的型线参数;
11.s2:采用包络面修整法设计从动轮型线;
12.s3:计算容积利用系数;
13.s4:验证,判断计算出的容积利用效率是否合格,若不合格,则调整主动轮型线参
数后重新执行s1
‑
s4。
14.可选的,所述s2的具体步骤为:
15.s21:通过传统方法后任意给定一个初始从动轮型线;
16.s22:通过离散主动轮型线以及离散主动轮的自转与公转,通过计算机仿真得到从动轮包络面;
17.s23:根据初始从动轮型线与从动轮包络面之间的距离重新调整从动轮型线的离散点,从而获得设计间隙下的从动轮的修整离散点;
18.s24:采用样条曲线将修整离散点表示为最终从动轮型线。
19.可选的,所述s23中重新调整从动轮型线的离散点的具体步骤为:
20.s231:通过初始从动轮型线的各离散点与从动轮包络面的距离进行调整,使得各离散点向从动轮包络面法向运动;
21.s232:计算运动后的各离散点之间的间距;
22.s233:根据各离散点的间距之和使得离散点向从动轮包络面切向运动,以使得各离散点之间等间距。
23.可选的,所述主动轮、从动轮均为旋转对称图形。
24.可选的,所述主动轮和从动轮的轴心距等于两倍齿轮节圆半径。
25.可选的,所述主动轮的型线包括两条呈旋转对称的型线单元,以同时垂直于主动轮旋转中心线及从动轮旋转中心线的平面为基准面,以主动轮旋转中心线在基准面上的投影为o1,以从动轮旋转中心线在基准面上的投影为o2;该型线单元向基准面上投影的组成如下:
26.ab段:垂直于o1o2;
27.bc段:与ab段相切的1/4圆弧且半径为r1;
28.cd段:与bc相切的线段;
29.de段:与cd段相切的1/4圆弧且半径为r2。
30.ef段:该ef段视为一条摆线;
31.所述ab段与o1之间的垂直距离为o1a=2r
‑
r
s
,且ab段长度为r2‑
r1;
32.所述cd段的长度为2r
‑
r1‑
r2。
33.可选的,以同时垂直于主动轮旋转中心线及从动轮旋转中心线的平面为基准面,其中壳体内壁轮廓在基准面上的投影为两个相交的圆,且圆的半径为r
m
;所述齿轮节圆在基准面上投影的半径为r。
34.可选的,所述ef段的摆线方程如下:
[0035][0036]
其中,参数δ为设计间隙,其中r
s
为ae的连线长度,且r
s
取
[0037]
可选的,所述s3中包括以下步骤:
[0038]
s31:分别计算主动轮的面积s1、从动轮的面积s2;
[0039]
s32:将s1、s2带入以下公式计算:
[0040]
可选的,所述主动轮的面积s1采用以下公式计算:
[0041][0042]
和/或所述从动轮面积s2通过积分或采用蒙特卡洛法获得。
[0043]
综上所述,本发明具有以下有益效果:
[0044]
1、本发明采用包络面调整法获得的调整后的点线可以很好的贴合包络面(根据设计间隙大小),从而保证主动轮和从动轮具有封闭的啮合线和连续的接触线;而且采用包络面修正的方法极大简化计算过程,可以获得很高的精度。
[0045]
2、本发明的主动轮和从动轮在运行过程中,不产生透孔,提高了真空泵的气密性。
[0046]
3、通过包络面法可以清晰观察从动轮与主动轮的啮合位置,便于对从动轮的型线进行修正。
附图说明
[0047]
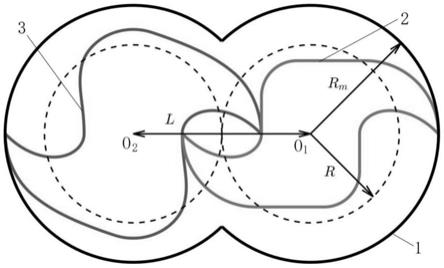
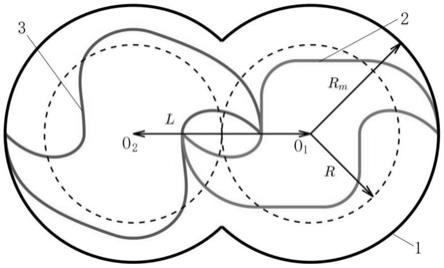
图1为本发明真空泵的整体结构图。
[0048]
图2为主动轮的型线示意图。
[0049]
图3为从动轮型线及包络面的整体图。
[0050]
图4为从动轮型线调整后的局部放大图。
具体实施方式
[0051]
为了使本技术领域的人员更好的理解本发明方案,下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整的描述。
[0052]
如图1
‑
2所示,一种基于包络面修正的特殊爪型真空泵型线设计方法,该特殊爪型真空泵包括壳体1、设于所述壳体1内的主动轮2及设于所述壳体1内的从动轮3,所述从动轮3与主动轮2形成共轭关系;所述主动轮2、从动轮3分别连接有一个齿轮,两个齿轮相互啮合以带动主动轮2、从动轮3同步转动。
[0053]
在一些实施例中,主动轮2与从动轮3均为旋转对称图形。
[0054]
所述真空泵型线设计方法包括以下步骤:
[0055]
s1:获得主动轮2的型线参数
[0056]
参考图1和图2,以同时垂直于主动轮2旋转中心线及从动轮3旋转中心线的平面为基准面,其中壳体1内壁轮廓在基准面上的投影为两个相交的圆,且圆的半径为rm;所述齿轮节圆在基准面上投影的半径设为r。并且两个相交的圆的圆心距为主动轮2及从动轮3的轴心距,也是齿轮节圆半径r的两倍,即l=2r。
[0057]
所述主动轮2的型线包括两条呈旋转对称的型线单元,以主动轮2旋转中心线在基准面上的投影为o1,以从动轮3旋转中心线在基准面上的投影为o2;该型线单元向基准面上
投影的由以下啮合段组成:
[0058]
ab段:垂直于o1o2;
[0059]
bc段:与ab段相切的1/4圆弧且半径为r1;
[0060]
cd段:与bc相切的线段;
[0061]
de段:与cd段相切的1/4圆弧且半径为r2。
[0062]
ef段:该ef段视为一条摆线;
[0063]
其中ab段与o1之间的垂直距离为o1a=2r
‑
r
s
,且ab段长度为r2‑
r1;所述cd段的长度为2r
‑
r1‑
r2。
[0064]
所述ef段的摆线方程如下:
[0065][0066]
其中,参数δ为设计间隙,其中r
s
为ae的连线长度,且r
s
取其中设计间隙为预留的加工误差。
[0067]
综上,主动轮2地型线采用r1、r2以及r
s
三个参数控制。
[0068]
s2:采用包络面修整法设计从动轮型线
[0069]
图3和图4示出了包络面法求解从动轮型线的示意图,且示出了各啮合段与从动轮包络面的对应关系。从图4中可以看出,初始从动轮型线在bc啮合段间距过大,在cd啮合段间距为负。
[0070]
所述s2的具体步骤为:
[0071]
s21:通过将啮合点固定在o1o2连线上,从而得到一个初始从动轮型线;由于此初始从动轮型线未考虑啮合点的垂向运动,该曲线极有可能存在负间距啮合的可能。
[0072]
s22:通过离散主动轮型线以及离散主动轮2的自转与公转,通过计算机仿真得到从动轮3包络面;
[0073]
s23:根据初始从动轮型线与从动轮包络面之间的距离重新调整从动轮型线的离散点,从而获得设计间隙下的从动轮3的修整离散点;
[0074]
s24:采用样条曲线将修整离散点表示为调整后从动轮型线。如图4所示,调整后的从动轮型线可以很好的贴合包络面。
[0075]
其中s23中重新调整从动轮型线的离散点的具体步骤为:
[0076]
s231:通过初始从动轮型线的各离散点与从动轮包络面的距离进行调整,使得各离散点向从动轮包络面法向运动;
[0077]
s232:计算运动后的各离散点之间的间距;
[0078]
s233:根据从动轮型线总长(各离散点间距之和)进行调整,使得离散点向从动轮包络面切向运动,以使得各离散点之间等间距。
[0079]
s3:计算容积利用系数
[0080]
容积利用系数采用以下公式计算:
[0081]
[0082]
其中s1为主动轮2面积,s2为从动轮3面积。主动轮2面积s1采用如下公式:
[0083][0084]
其中从动轮3面积s2可积分得到或采用蒙特卡洛法得到。
[0085]
s4:验证,判断计算出的容积利用效率是否合格,若不合格,则调整主动轮型线参数后重新执行s1
‑
s4。
[0086]
本发明具有以下优点:
[0087]
1、目前对于啮合线间距不等的问题,大多需要首先保证消除负间距,进而再缩小从动轮3尺寸,而这会使得bc啮合段间距进一步增加。而本发明采用包络面调整法获得的调整后的点线可以很好的贴合包络面(根据设计间隙大小),从而保证啮合;而且采用包络面修正的方法极大简化计算过程,可以获得很高的精度。
[0088]
2、通过包络面法可以清晰观察从动轮3与主动轮2的啮合位置:从图4可以清晰表明初始从动轮型线在与主动轮bc段配合时出现较大的间隙,在于cd段配合时出现负间隙的问题。
[0089]
以上所述的实施方式,并不构成对该技术方案保护范围的限定。任何在上述实施方式的精神和原则之内所作的修改、等同替换和改进等,均应包含在该技术方案的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。