1.本实用新型属于精密机械误差测量技术领域,具体涉及一种基于角度触发采集的回转轴线全姿态误差同步测量装置。
背景技术:
2.超精密转台是机械加工、测量领域的重要设备之一。超精密转台回转轴线的六自由度误差是评价其动态性能的重要技术指标之一。假设z轴为旋转轴,六自由度误差主要包括回转轴线在x、y方向的径向运动误差,z方向的轴向运动误差,绕x、y的偏摆角度误差和绕z轴的回转角度误差。目前,六自由度误差的测量一般会分成两个或两个以上的步骤进行,这种测量方式过程繁杂,而且过多的测量步骤和过长的测量周期会引入很多不确定因素。
3.另外,超精密转台回转轴线的六自由度测量的重要步骤是采集位移数据和角度数据,一般采用高精度的位移传感器和圆光栅角度编码器,通过位移传感器的测量可以得到转轴在某一角度测量的位移值,通过圆光栅编码器测量可以得到转轴角位置值。然而,超精密测量中,测量结果很容易受到各种不确定因素的影响,如转轴角速度波动和安装偏心就会对测量数据产生影响:转轴角速度波动会使位移传感器测得的位移值产生相位移动,导致测量位移值与实际角度值不能一一对应,进而会影响径向回转误差和偏摆角度误差测量结果的准确性;安装偏心包括标准器的安装偏心和圆光栅的安装偏心,标准器的安装偏心会导致位移值测量不准确,进而会影响径向回转误差和偏摆角度误差测量结果的准确性,圆光栅的安装偏心会导致角度值测量不准确,进而会影响回转角度误差测量结果的准确性。
技术实现要素:
4.本实用新型所要解决的技术问题便是针对上述现有技术的不足,提供一种基于角度触发采集的回转轴线全姿态误差同步测量装置,它设计巧妙,测量便捷,同时能消除速度波动对位移测量的影响和消除圆光栅安装偏心对角度测量的影响,大大提高了测量的精度。
5.本实用新型所采用的技术方案是:一种基于角度触发采集的回转轴线全姿态误差同步测量装置,包括固定座、微倾斜调节台、圆光栅编码器、光栅读数头、基准球、支撑板和装夹台,所述微倾斜调节台位于支撑板下方,所述微倾斜调节台顶部中心成型有圆孔槽,所述圆光栅编码器固定安装在微倾斜调节台的顶部,且圆光栅编码器与圆孔槽同轴设置,所述光栅读数头设有数个,数个光栅读数头均匀分布在圆光栅编码器外围,并与圆光栅编码器位于同一水平面,光栅读数头通过安装板固定在支撑板底部,所述支撑板上开有与圆孔槽同轴的通孔,所述基准球的一端与圆孔槽插接,另一端穿过通孔且基准球的第一靶球和第二靶球位于支撑板上方,与基准球的第一靶球球心水平对应处垂直分布有第一位移传感器和第二位移传感器,与基准球的第二靶球球心水平对应处垂直分布有第三位移传感器和第四位移传感器,所述基准球上方还设有与基准球同轴的第五位移传感器,所述第一位移
传感器、第二位移传感器、第三位移传感器、第四位移传感器和第五位移传感器均固定在装夹台上,所述装夹台固定安装在支撑板顶部。
6.作为优选,所述微倾斜调节台包括从下至上依次同轴设置的底座、连接座和调节座,所述底座和连接座固定连接,连接座与调节座之间设有调节滚珠和数根调节螺栓,所述调节滚珠位于连接座顶部中心,数根调节螺栓沿连接座圆周均匀分布,所述圆孔槽和圆光栅编码器均位于调节座顶部,并与调节座同轴设置。
7.作为优选,所述装夹台包括底板、顶板和固定在底板与顶板之间侧板,所述侧板为一体成型的两块相互垂直的竖板构成,所述底板设有与通孔匹配的开口,并固定安装在支撑板的通孔处,所述侧板的下部与基准球的第一靶球球心水平对应处开有两个中心线相互垂直的安装孔,侧板的上部与基准球的第二靶球球心水平对应处还开有两个中心线相互垂直的安装孔,所述顶板与基准球轴线对应处同样开有安装孔。
8.作为优选,所述安装孔处开有压缝和调节缝,所述压缝呈l型,压缝的一端与安装孔连通,另一端贯穿侧板或顶板侧壁,所述调节缝位于安装孔下方并与压缝相对应,所述压缝与调节缝之间的侧板侧壁上开有锁紧孔,锁紧孔与安装孔错位分布且锁紧孔与压缝一侧平行,并贯穿压缝的另一侧。
9.作为优选,所述安装板呈l型,安装板的一端与支撑板底部固定连接,另一端开有与光栅读数头匹配的连接槽,所述光栅读数头卡接固定在连接槽中,并与圆光栅编码器水平对齐。
10.本实用新型的有益效果在于:
11.(1)通过设置中心线相互垂直的第一位移传感器和第二位移传感器,中心线相互垂直的第三位移传感器和第四位移传感器,与基准球同轴的第五位移传感器,实现定角度位移数据采集,并与圆光栅编码器采集的角度值一一对应,消除了速度波动对位移测量的影响;
12.(2)设置数个均匀分布在圆光栅编码器四周的光栅读数头,能取数个光栅读数头测量数据的平均值作为最终角度值,消除了圆光栅编码器安装偏心对角度测量的影响。
13.本实用新型可同时完成超精密转台回转轴线的六自由度测量,测量过程简单、测量效率高,同时能有效提高测量的精度。
附图说明
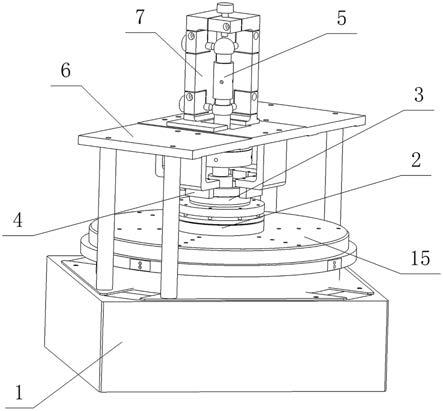
14.图1为本实用新型结构示意图;
15.图2为本实用新型微倾斜调节台的结构示意图;
16.图3为本实用新型微倾斜调节台的剖视图
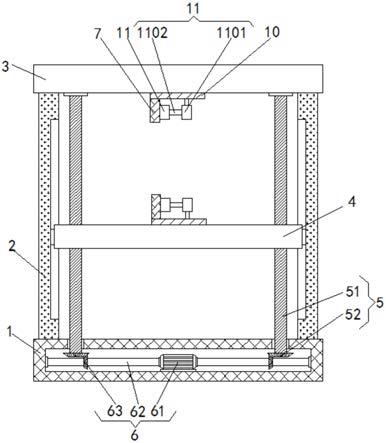
17.图4为本实用新型装夹台的装夹示意图;
18.图5为本实用新型装夹台的结构示意图(未安装位移传感器);
19.图6为本实用新型圆光栅编码器和光栅读数头的局部示意图。
20.图中:1、固定座;2、微倾斜调节台;3、圆光栅编码器;4、光栅读数头;5、基准球;6、支撑板;7、装夹台;8、圆孔槽;9、安装板;10、第一位移传感器;11、第二位移传感器;12、第三位移传感器;13、第四位移传感器;14、第五位移传感器;15、超精密转台;201、底座;202、连接座;203、调节座;204、调节滚珠;205、调节螺栓;701、底板;702、顶板;703、侧板;704、开
口;705、安装孔;706、压缝;707、调节缝;708、锁紧孔。
具体实施方式
21.下面将结合附图及具体实施例对本实用新型作进一步详细说明。
实施例
22.如图1、图2、图3、图4、图5和图6所示,本实施例提供的基于角度触发采集的回转轴线全姿态误差同步测量装置,包括固定座1、微倾斜调节台2、圆光栅编码器3、光栅读数头4、基准球5、支撑板6和装夹台7;
23.所述固定座1顶部固定连接有待测超精密转台15,微倾斜调节台2固定在超精密转台15顶面;
24.所述微倾斜调节台2包括从下至上依次同轴设置的底座201、连接座202和调节座203,所述底座201和连接座202固定连接,连接座202与调节座203之间设有调节滚珠204和数根调节螺栓205,所述连接座202顶部中心和调节座203底部中心处分别开有与调节滚珠204匹配的凹槽,调节滚珠204置于凹槽内,调节座203通过调节滚珠204可实现在水平方向的倾斜调节,同时连接座202和调节座203上沿连接座202圆周对应开有连接孔,调节螺栓205与连接孔匹配,本实施例中调节螺栓205设有八根,通过拧紧或松动不同的调节螺栓205,来实现调节座203以调节滚珠204为中心,在水平方向
±5°
的倾斜变化;
25.所述微倾斜调节台2的调节座203顶部中心开有与基准球5匹配的圆孔槽8,圆孔槽8用于固定连接基准球5,同时在圆孔槽8外还套设有圆光栅编码器3,圆光栅编码器3、圆孔槽8和调节座203同轴设置;在调节调节座203的水平位置时,即是对圆孔槽8内安装的基准球5位置进行调节;
26.微倾斜调节台2装配后固定在超精密转台15顶面,固定时需要保证微倾斜调节台2的底座201与超精密转台15同轴,由于是对超精密机械进行测量,因此微倾斜调节台2在安装后,调节座203与底座201的同轴度不能达到测量需求,在将基准球5安装在调节座203的圆孔槽8后,需要对调节座203进行调控,从而保证基准球5与微倾斜调节台2的底座201同轴,即在测量前保证基准球5与超精密转台15同轴,基准球5与超精密转台15的同轴误差控制在1微米以下;
27.所述支撑板6通过数根支撑杆固定在固定座1上,并位于微倾斜调节台2的上方,所述支撑板6上与微倾斜调节台2对应处开有通孔,通孔的中心位于微倾斜调节台2的轴线上,本实施例中通孔采用方孔,通孔的大小与基准球5相适配,能保证基准球5的上部穿过通孔位于支撑板6上方,即在将基准球5安装在微倾斜调节台2的圆孔槽8后,基准球5上部的第一靶球和第二靶球均穿过支撑板6,并位于支撑板6的上方;
28.所述圆光栅编码器3四周均匀分布有数个光栅读数头4,本实施例设有四个光栅读数头4,四个光栅读数头4平齐,并呈十字分布位于圆光栅编码器3的四周,保证光栅读数头4与圆光栅编码器3之间的直线距离符合要求,同时保证光栅读数头4与圆光栅编码器3水平对齐;光栅读数头4通过安装板9与支撑板6底部固定,安装板9呈l型,安装板9的一端固定安装在支撑板6底部,另一端开有连接槽,光栅读数头4通过连接槽固定在安装板9的端部;
29.所述装夹台7包括底板701、顶板702和固定在底板701与顶板702之间侧板703,所
述侧板703为一体成型的两块相互垂直的竖板构成,所述底板701设有与支撑板6的通孔相匹配的开口704,并将底板701固定安装在支撑板6的通孔处,即将装夹台7安装在通孔处,使得从通孔穿出的基准球5被侧板703包围;
30.在侧板703的下部与基准球5的第一靶球球心水平对应处开有两个安装孔705,这两个安装孔705分别位于侧板703的两块竖板上,两个安装孔705的中心线在基准球5的第一靶球球心处垂直相交,用于安装第一位移传感器10和第二位移传感器11;
31.在侧板703的上部与基准球5的第二靶球球心水平对应处还开有两个安装孔705,这两个安装孔705分别位于侧板703的两块竖板上,两个安装孔705的中心线在基准球5的第二靶球球心处垂直相交,用于安装第三位移传感器12和第四位移传感器13;
32.在顶板702上与基准球5的轴线对应处同样开有通孔,用于安装第五位移传感器14;
33.所述侧板703的安装孔705处开有贯穿侧板703壁厚的压缝706和调节缝707,所述压缝706呈l型,压缝706的一端与安装孔705连通,另一端贯穿侧板703的侧壁,所述调节缝707位于安装孔705下方并与压缝706相对应,所述压缝706与调节缝707之间的侧板703侧壁上开有锁紧孔708,锁紧孔708与安装孔705错位分布且锁紧孔708与压缝706一侧平行,并贯穿压缝706的另一侧;通过设置压缝706和调节缝707,使得安装孔705处的侧板703被分割成锁紧块,通过使用与锁紧孔708匹配的锁紧螺栓,将安装孔705处的锁紧块向内锁紧,从而使得压缝706闭合,即使得安装孔705缩紧,达到固定位移传感器的目的;
34.所述顶板702亦是采用压缝706、调节缝707和锁紧孔708来实现对安装孔705的缩紧;
35.本实用新型安装完成后,超精密转台15、微倾斜调节台2的底座201、基准球5的轴线位于同一轴线上;第一位移传感器10与第二位移传感器11朝向基准球5的第一靶球,并与第一靶球的球心处于同一水平面;第三位移传感器12与第四位移传感器13朝向基准球5的第二靶球,并与第二靶球的球心处于同一水平面;第五位移传感器14朝向基准球5的第二靶球的顶部中心,并与第二靶球的球心竖直对齐。
36.测量时,超精密转台15转动,带动基准球5进行转动,通过第一位移传感器10和第三位移传感器12可测得基准球5沿x轴的位移误差,通过第二位移传感器11和第四位移传感器13可测得基准球5沿y轴的位移误差;通过第五位移传感器14可测得基准球5沿z轴的位移误差,通过第一位移传感器10和第三位移传感器12或者第二位移传感器11和第四位移传感器13测得的数据,经过公式计算可得出回转轴绕x或y轴旋转的角度误差;圆光栅编码器3周围均匀布置四个光栅读数头4,取四个光栅读数头4测得的角度误差的平均值作为基准球5的回转角度误差,可以消除圆光栅编码器3安装偏心和主轴径向运动对读数的影响,大大提高了角度误差测量精度。
37.以上所述仅是本实用新型优选的实施方式,但本实用新型的保护范围并不局限于此,任何基于本实用新型所提供的技术方案和发明构思进行的改造和替换都应涵盖在本实用新型的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。