1.本实用新型涉及电子控制技术领域,尤其涉及一种用于控制多路舵机的电子装置。
背景技术:
2.现有舵机控制装置控制模式单一,更换模式需更改程序,有着成本高、兼容性差、稳定性差、控制单一的缺陷。
技术实现要素:
3.本实用新型的发明目的在于:针对上述存在的问题,提供一种用于控制多路舵机的电子装置,本装置采用大电流电源的方式为整个电子装置供电,在兼容不同扭力舵机的同时可保证这个电子装置系统的稳定性,无需再进行二次设计,同时采用rf收发单元进行通信、多个电阻进行模式配置,内置调试接口单元为上位机提供调试接口,数据存储单元预存程序,多路adc采样可采集通道阻值变化,并可根据不同值运行预存程序,具有控制方式多样、可实现高实时性、高精度等特点。
4.本实用新型采用的技术方案是这样的:
5.用于控制多路舵机的电子装置,包括:控制盒、舵机、电源、电阻单元和提示单元,所述控制盒包含壳体上盖、壳体下盖和电路板,所述电路板上安装有嵌入式处理器、电源管理单元、数据存储单元和调试接口单元;
6.所述壳体上盖和所述壳体下盖配合,形成一个容纳腔,所述电路板安装在所述容纳腔内,所述电源通过所述电源管理单元分别与所述电路板和所述舵机连接;
7.所述舵机与所述嵌入式处理器连接,所述舵机由所述嵌入式处理器控制活动;
8.所述嵌入式处理器与所述电阻单元连接,所述嵌入式处理器采集所述电阻单元的电阻信号并根据该电阻信号使舵机处于不同的控制模式;
9.所述提示单元与所述嵌入式处理器连接,用于表示舵机当前处于的控制模式状态;
10.所述数据存储单元与所述嵌入式处理器连接,用于存储本电子装置的数据;
11.所述调试接口单元连接在所述嵌入式处理器上,用于提供数据接口。
12.其中,所述电源管理单元包括开关电路、第一降压模块和第二降压模块,所述电源连接所述开关电路后分别连接在所述第一降压模块和所述第二降压模块上,所述第一降压模块连接在所述舵机上,将降压后的电压输入至所述舵机,所述第二降压模块连接在所述嵌入式处理器上,将降压后的电压输入至所述嵌入式处理器。
13.另外,嵌入式处理器内部集成有用于通信的rf收发单元、用于数据处理的adc采样单元、io单元和pwm单元,嵌入式处理器通过rf收发单元接收舵机的运动数据控制舵机运动,通过adc采样单元采集电阻单元信号进行处理。
14.进一步的,所述电源选用18650型号电池。
15.进一步的,所述第一降压模块采用sct2280降压芯片。
16.进一步的,所述rf收发单元选用ble5.0通信模块。
17.进一步的,所述提示单元选用led单元。
18.进一步的,所述数据存储单元选用eeprom存储芯片。
19.进一步的,所述调试接口单元选用ch340e芯片。
20.进一步的,所述舵机采用hiwonder lfd
‑
01式机器人舵机。
21.综上所述,由于采用了上述技术方案,本实用新型的有益效果是:
22.本实用新型通过ble5.0进行无线通信,达到了高速、远距离、高稳定性、低功耗的效果;本实用新型通过eeprom芯片存储和读取预存程序、舵机数据等信息,adc采样可采集通道阻值变化,并可根据不同值运行预存程序,实现性能增强、人机互动、呼吸灯效果等多种玩法实时切换;ch340实现usb转ttl功能,为上位机提供调试接口;本实用新型改变了现有舵机控制电子装置舵机成本高、控制单一的缺陷。
附图说明
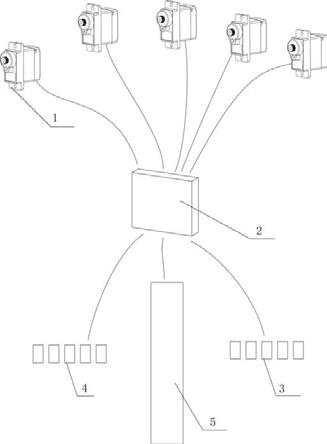
23.图1是本实用新型一实施例提供的一种用于控制多路舵机的电子装置的整体示意图。
24.图2是本实用新型一实施例提供的一种用于控制多路舵机的电子装置的爆炸示意图。
25.图3是本实用新型一实施例提供的一种用于控制多路舵机的电子装置的电源框架示意图。
26.附图说明:1为舵机,2为控制盒,2
‑
1为壳体上盖,2
‑
2为电路板,2
‑
3为壳体下盖,3为电阻单元,4为提示单元,5为电源。
具体实施方式
27.为使本实用新型实施例的目的、技术方案和优点更加清楚,下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
28.实施例1
29.本实施例提供一种用于控制多路舵机的电子装置,如图1、图2所示,本装置包括控制盒2、电阻单元3和提示单元4、5个舵机1和由两节7.4v 18650电池串联构成的电源5。
30.其中,控制盒2包含壳体上盖2
‑
1、壳体下盖2
‑
3和电路板2
‑
2,壳体上盖2
‑
1和壳体下盖2
‑
3配合形成一个容纳腔,电路板2
‑
2安装在这个容纳腔内,电路板2
‑
2上安装有嵌入式处理器、电源管理单元、数据存储单元和调试接口单元。
31.嵌入式处理器为整个电子装置的控制核心,舵机1连接在嵌入式处理器的输出端上,舵机1由该嵌入式处理器控制活动。
32.电阻单元3是指由多个电阻连接在电路板2
‑
2上形成的用于产生电阻信号的集成单元,电阻单元3连接在嵌入式处理器的输入端上,嵌入式处理器采集电阻单元3的电阻信号并进行处理,根据处理的结果来操控舵机1,使舵机1处于不同的控制模式。
33.提示单元4是指由多个具有提示功能的电子元器件连接在电路板2
‑
2上形成的能给出提示信息的集成单元,提示单元4连接在嵌入式处理器的输出端上,在嵌入式处理器操
控舵机1处于某种控制模式下时,提示单元4会根据嵌入式处理器给出的信息给出提示,以此来告知当前情况下舵机1所处的控制模式。
34.数据存储单元连接在嵌入式处理上,用于存储本电子装置的数据。
35.调试接口单元为本电子装置与外界连接的通道,调试接口单元连接在嵌入式处理器上,用于为上位机提供数据接口。
36.实施例2
37.本实施例是在实施例1的基础上作出的进一步改进,具体的,在本实施例中,电源管理单元包括开关电路、第一降压模块和第二降压模块,如图3所示,电源5连接开关电路后分为两路,其中一路经过第一降压模块降压为5v电压后,输入至舵机1,另外一路经过第二降压模块降压为3.3v电压后输入至嵌入式处理器;其中,第一降压模块采用sct2280降压芯片。
38.实施例3
39.本实施例是在实施例1基础上作出的进一步改进,具体的,在本实施例中,采用nrf52832芯片作为嵌入式处理器,负责对整个电子装置的控制,nrf52832芯片内部集成有rf收发单元、adc采样单元、io单元和pwm单元,其中,采用ble5.0通信模块作为rf收发单元,nrf52832芯片通过ble5.0通信模块接收舵机1传过来的运动数据并发送指令至舵机1控制舵机1运动,另外,nrf52832芯片通过adc采样单元采集电阻单元3信号进行处理,本实施例中的nrf52832芯片通过采集电阻单元3的信号,可根据电阻单元3信号变化来控制舵机1。
40.实施例4
41.本实施例是在实施例1基础上作出的进一步的改进,具体的,在本实施例中,提示单元4是由多个led灯构成的集成单元,本实施例中并不只限于使用led灯构成提示单元4,还可以使用其他能够实现呼吸、快闪、常亮等灯光效果的装置。
42.实施例5
43.本实施例是在实施例1基础上作出的进一步的改进,具体的,在本实施例中,数据存储单元选用eeprom存储芯片,本实施例中并不只限于使用eeprom存储芯片进行数据存储,还可以使用其他能够存储数据的芯片。
44.实施例6
45.本实施例是在实施例1基础上作出的进一步的改进,具体的,舵机1采用hiwonder lfd
‑
01式机器人舵机1。
46.下面给出一个本电子装置的具体应用实例。
47.本电子装置应用于仿生手指的控制,通过舵机及连杆控制手指运动,每个手指对应一个舵机,整体的结构简单,可靠性强,成本低,无需编写复杂的动力分配算法,控制简单改变了现有仿生手成本高、控制难度大的缺陷。
48.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。